
基于Dubins曲线的高超声速飞行器路径规划*
2015-12-26 05:45王荔豪王爱华于云峰
弹箭与制导学报 2015年3期
王荔豪,王爱华,柯 楠,于云峰
(1 西北工业大学航天学院,西安 710072;2 上海航天技术研究院,上海 200245;
3 西北工业大学软件与微电子学院,西安 710072)
基于Dubins曲线的高超声速飞行器路径规划*
王荔豪1,王爱华2,柯楠3,于云峰1
(1西北工业大学航天学院,西安710072;2上海航天技术研究院,上海200245;
3西北工业大学软件与微电子学院,西安710072)
摘要:对于高超声速飞行器而言,在进行航迹规划时需要考虑很多的约束条件,主要的约束条件是有限的转弯半径和最短的飞行路径。针对这些问题,文中设计了一种基于Dubins曲线的高超声速飞行器路径规划算法,并对算法的通用性进行了仿真分析。结果表明,本算法能够为飞行器在起始位置和终止位置之间规划出一条满足约束条件的最短飞行轨迹,并且能够避开雷达探测、激光武器威胁、电子干扰威胁等威胁区域。
关键词:高超声速飞行器,Dubins曲线;约束条件;路径规划
0引言
高超声速飞行器是指在大气层内以大于5Ma速度飞行的一类飞行器,与传统飞行器相比,具备远程快速打击能力,能够适应未来快节奏作战需要。同时,由于全局飞行环境无法准确预知,所以需要实时的规划飞行轨迹,来避开已知的威胁区域以及新出现的威胁[1]。文献[2]基于A*算法,对低空飞行器进行实时航迹规划,取得了较好的效果,但是由于高超声速飞行器的飞行高度高的特点,此方法不适用于高超声速飞行器的航迹规划。文献[3]提出了一种基于A*算法的三维航迹规划算法,通过离散飞行器过载来构建搜索空间,但是这种方法在节点扩散时的计算量过大,影响规划效率。文献[4]提出一种基于改进稀疏A*算法的高超声速飞行器航迹规划技术,能够有效的避开各种威胁,但没有针对性地对飞行器最短路径进行研究。
文中在Dubins曲线规划基础上,设计用于高超声速飞行器的路径规划算法,随后建立威胁场模型,并进行仿真分析。结果表明,本算法能够为高超声速飞行器在起始位置和目标位置之间规划出一条最短飞行路径,所规划路径综合考虑了飞行器的转弯半径要求和到达目标位置的角度要求,并在飞行过程中避开雷达探测、激光武器威胁、电子干扰威胁等威胁区域,且算法运算速度快,稳定性较好。
1约束条件
高超声速飞行器航迹规划的目的是要寻找一条保证飞行器安全突防的飞行轨迹,需要尽量减少被敌方捕获和摧毁的概率。同时,为高超声速飞行器规划的路径既要满足飞行器本身的物理机动性能,又需要满足一系列约束条件。一般来说,约束条件包括以下几个方面:
1)最大转弯角。由于高超声速飞行器多采用机体/发动机一体化设计理论,决定了其机动能力较差,转弯半径较大,生成的飞行轨迹只能在小于或等于预先确定的最大角度范围内转弯。该约束条件也取决于具体飞行器的性能和飞行任务。
2)航迹距离约束。飞行器的航迹距离约束与其飞行高度、飞行路径长度、机动次数等因素密切相关。由于受到飞行器燃料供应量的限制,航迹长度必须小于或等于预先设定的最大距离,同时要求飞行路径越短越好,这样能够保证飞行器在固定的时间内必须到达目标所在位置。
3)最小航迹段长度。其限制了飞行器在开始改变飞行姿态前必须直飞的最短距离。保证飞行器在远距离飞行时不进行迂回和频繁的转弯。
4)固定的目标进入方向。确保飞行器从特定的角度接近目标,从而对目标的最薄弱位置进行有效攻击。
2威胁建模
高超声速飞行器作战区域广,飞行区域内分布有各种威胁。在航迹规划过程中需要考虑的威胁主要有雷达、激光、电子干扰等威胁场。
2.1 雷达威胁
对于飞行器是否被探测到,即是否仍对雷达处于隐身状态是以一定的发现概率为条件的[5]。这里将雷达探测概率计算模型简化为:
(1)
式中:Rmax为雷达最大作用距离;r为雷达与飞行器之间的水平距离。
2.2 激光武器威胁
对于飞行器的航迹规划研究,激光武器的杀伤范围定义为一个以武器发射装置为球心的半球形的区域,如图1所示。
图1 激光武器威胁范围示意图
2.3 电子干扰威胁
一般情况下,认为电子干扰的作用范围为半球形,构成了以电子干扰发射装置位置为中心,以最大作用范围为半径的威胁区域。
3路径规划
路径规划是飞行器任务飞行的关键组成部分。需要根据任务目标规划出满足约束条件的飞行轨迹,在起始位置和目标位置之间自动生成一条最优的飞行轨迹,从而使飞行器能够以最短的时间到达目标所在位置,安全可靠的完成预定飞行任务。
3.1 Dubins曲线
假设空间有两个位置点Pi=(xi,yi,θi)和Pf=(xf,yf,θf),下标i表示起始位置的参数,f表示目标位置的参数,它们分别为飞行器的起始位置和目标位置,之间的距离远大于2Rturn,其中Rturn为飞行器转弯时的转弯半径,且满足Rturn≥Rmin,Rmin为飞行器的最小转弯半径。
基于Dubins理论,在起始位置和目标位置之间可以规划出一条满足约束条件的最短飞行路径,如图2所示。
图2 Dubins最短飞行路径示意图
3.2 避障策略
1)威胁区域阻挡判定
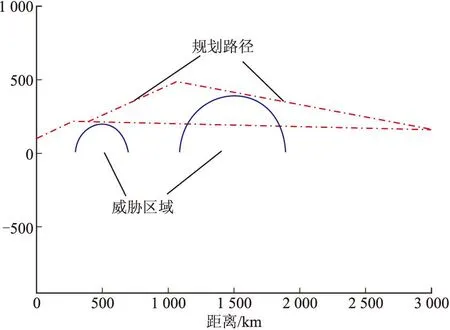
将威胁区域的中心定义为威胁点,在飞行器的飞行过程中,如果满足d·sin|φ| (2) 式中:xw和yw为威胁点的位置;xd和yd为当前飞行器所在位置。 (3) 式中:β为当前飞行速度与水平方向的夹角。 2)避障方法 在飞行器飞行过程中,如果判断威胁区域覆盖了当前路径,按照以下方法对飞行路径进行重新规划。 i)生成中间位置坐标(xc,yc) 当飞行器在飞行过程中计算判断到威胁区域覆盖了当前路径时,计算得到飞行器当前位置与威胁区域之间的最短距离,记为dmin。 (4) 式中:Rw为威胁区域的半径,此时威胁区域形状在二维平面以圆形计算。 最短距离所对应的威胁区域边界点记为Pa,定义该连线与飞行器当前速度方向的夹角为φa;同时定义飞行器当前位置距离威胁区域两个最边缘的边界点分别为Pb和Pc,其与当前位置的距离分别为db和dc,得到: (5) 它们的连线与飞行器当前速度方向夹角分别记为φb和φc,如图3所示。 图3 具体参数示意图 以飞行器当前位置为起点,d=dmin为矢量长度,以飞行器当前速度方向为基准方向,旋转一个角度θ,得到一个矢量,其中θ的计算方法如下: (6) 式中:Δθ为预设定的角度步长;m=1,2,…,π/Δθ。 计算矢量dmin·sin|θ-φn|,如果满足: (7) 则该矢量的终点坐标即为飞行器中间位置的坐标。否则以飞行器当前速度方向为基准方向,旋转-θ角度生成矢量,若该矢量满足上式,则该矢量的终点坐标即为飞行器中间位置的坐标;否则令m=m+1,重复上述过程,直至生成的矢量满足上式;经过多次迭代后,如果m取值大于π/Δθ,则改变矢量长度d,令d=α·d,0<α<1,此时重新选取m=1,重复前面的求取过程,直至生成矢量满足上式。 经过上述迭代计算后,如果飞行器当前位置为(xw,yw,θw),则中间位置的坐标为: (8) 式中d和θ都是经过迭代过程后的最终取值。 ii)生成中间位置的方向角度θc 在计算了中间位置的坐标后,还需要计算飞行器到达中间位置的方向。首先从当前位置到中间位置规划出一条Dubins路径,这条路径包括直飞距离和中间位置的圆弧距离。所以,计算中间位置的方向时,可以直接令中间位置的方向指向终止位置的两个切圆中距离较近的那个切圆的切线,这样在计算由中间位置到终止位置间的Dubins路径时,就不需要计算中间位置的切圆,生成的飞行路径仅由一条切线和终止位置的切圆圆弧组成,如图4所示。 图4 飞行器避障示意图 中间位置的方向角度为: (9) 式中:Rturn为飞行器的转弯半径,终止切圆圆心坐标为(xO2,yO2)。 3)总结 文中首先定义飞行器的起始位置Pi和目标位置Pf,规划出一条Dubins路径。飞行器从起始位置飞行开始,当飞行器飞行了一段最小航迹段后,开始对威胁区是否覆盖当前飞行路径进行判断。如果判断威 胁区没有覆盖飞行路径后,则沿该路径一直飞行,在飞行过程中每飞行一定距离后计算一次,实时判断威胁区是否覆盖当前飞行路径。 当飞行器飞行至当前位置时,如果计算判断到威胁区域覆盖了当前路径,则需要采用避障策略为飞行器计算生成一个中间位置Pc,同时实时规划出一条从当前位置到中间位置Pc之间的Dubins路径,之后飞行器将沿新生成的路径飞行至Pc处。在飞行器到达中间位置Pc后,会重新规划出一条从中间位置Pc到目标位置Pf的Dubins路径,将该路径作为飞行器的当前飞行路径。 在新生成的路径飞行过程中,不断重复以上计算判断过程,直至飞行器到达目标位置Pf。 4仿真分析 图5 仿真结果示意图 仿真区域设置为3 000 km×500 km,设有两处威胁场,威胁范围半径分别为200 km和400 km,飞行器转弯半径设置为20 km,使用Matlab软件实现仿真过程。如图5所示,为仿真得到的飞行器飞行路径规划图,路径规划区域水平宽度为3 000 km,规划区域高度为500 km。从图中可以看出,所规划的飞行路径能够满足飞行器的转弯半径约束条件,并且保证了最短的飞行距离,同时有效的避开了设置的威胁场。另外,在仿真过程中还发现,对于文中所列两个威胁场的情况,完成飞行器飞行路径规划总共用时0.04 s,运算速度快,且稳定性较好。 5结论 文中首先分析了高超声速飞行器与普通飞行器在航迹规划技术方面的不同之处,并有针对性地建立了威胁场模型,随后在Dubins曲线的基础上,设计了一种用于高超声速飞行器的路径规划避障算法,最后对该算法的通用性进行了Matlab仿真分析。仿真结果表明:该算法能够实时为飞行器规划出一条最短飞行路径,且规划时间短,同时能有效的避开威胁区域。 参考文献: [1]郑昌文. 飞行器航迹规划研究 [J]. 宇航学报, 2007, 28(6): 1441-1446. [2]管文艳, 韩亮. 低空突防模型建模的研究 [J]. 系统仿真学报, 2006, 18(2): 77-82. [3]宋建梅, 李侃. 基于A*算法的远程导弹三维航迹规划算法 [J]. 北京理工大学学报, 2007, 27(7): 613-617. [4]孟中杰, 黄攀峰, 闫杰. 基于改进稀疏A*算法的高超声速飞行器航迹规划技术 [J]. 西北工业大学学报, 2010, 28(2): 182-186. [5]郭正新, 江晶. 一种不同距离的雷达检测概率计算模型 [J]. 空军雷达学院学报, 2003. 17(4): 7-9. 收稿日期:2015-03-04 作者简介:王荔豪(1991-),男,陕西渭南人,硕士研究生,研究方向:飞行器控制与仿真研究。 中图分类号:TP319.9 文献标志码:A Route Planning for Hypersonic Vehicle Based on Dubins Curves WANG Lihao1,WANG Aihua2,KE Nan3,YU Yunfeng1 (1School of Astronautics, Northwestern Polytechnic University, Xi’an 710072, China; 2Shanghai Academy of Spaceflight Technology, Shanghai 200245, China; 3School of Sofeware and Microelectronics, Northwestern Polytechnic University, Xi’an 710072, China) Abstract:So many constraint conditions should be considered when planning route for hypersonic vehicle. The most important constraint conditions are the limited radius of turning circle and the shortest flight route. A flight path planning method based on Dubins geometric method for hypersonic vehicle was designed, then simulating and analysising the generality of algorithm. What is indicated in the result is that this algorithm can plan a shortest flight path meeting the constraint conditions between initial point and termination point for vehicle. This path can avoid the deterrent of radar, laser weapons, and electronic interfence. Keywords:hypersonic vehicle; constraint condition; route planning
猜你喜欢
汽车实用技术(2022年16期)2022-08-31
中国新通信(2016年22期)2017-01-13
电脑知识与技术(2016年28期)2016-12-21
电子技术与软件工程(2016年20期)2016-12-21
科技视界(2016年26期)2016-12-17
电脑知识与技术(2016年26期)2016-11-25
北京航空航天大学学报(2016年6期)2016-11-16
科技视界(2016年20期)2016-09-29
中国市场(2016年12期)2016-05-17
