非线性动态逆空中加油自主对接控制
2015-12-25 09:21王健董新民王海涛窦和锋彭轲
飞行力学 2015年1期
王健,董新民,王海涛,窦和锋,彭轲
(空军工程大学航空航天工程学院,陕西西安710038)
0 引言
自主空中加油(Automatic Aerial Refueling,AAR)技术能够有效延长 UAV的航程与任务时间[1],是实现长航时和扩大作战半径的手段之一,其中实现自主对接控制是完成UAV自主空中加油的关键。
AAR自主对接控制主要包括轨迹跟踪、对接控制和位置保持三个阶段。尽管软管式加油与硬管式加油在对接控制阶段的要求有所不同,但受油机的基本控制方式和目标是一致的。从本质上看,自主对接各阶段可以看作扰动影响下的相对位置的跟踪和保持。王宏伦等[2]考虑加油机尾涡和锥套摆动的影响,设计了受油机参考轨迹发生器和轨迹跟踪控制器;文献[3]针对空中加油存在的加油机尾流干扰,利用等效气动效应法建立了UAV动力学模型,基于加权二次型性能指标设计了自主对接最优控制律。显然上述文献都是针对线性小扰动模型设计控制律,不能准确反映自主空中加油过程的复杂动力学特性。因此,采用非线性方法设计控制律成为一种趋势,而非线性动态逆利用期望的动态去弥补系统原有的不完整、不期望动态,实现非线性对消,在飞机控制律研究中得到了应用。文献[4]采用层叠结构的动态逆控制器,设计了飞机四组状态变量的控制律;文献[5]采用常规动态逆和模型参考动态逆分别设计了控制律,对比分析其特点和差异。但在常规非线性动态逆设计中,大多数学者采用气流角进行控制,该方法存在控制量幅值和速率过大的问题,忽视了飞机协调转弯及爬升速率的限制,另外气流角在实际应用中不能像姿态角那样更精确、更稳定地被飞机传感器测量。
本文针对上述问题,建立了尾流影响下的UAV六自由度模型。利用动态逆非线性对消的特点,设计了空中加油自主对接控制律。根据时标分离原理,将飞机控制律划分为航迹、姿态、角速率和自动油门等回路进行设计。采用比例反馈方法,设计了航迹跟踪控制律。引入爬升速率和协调转弯约束,设计了姿态指令生成器,并设计了一种受油机内环角速率及自动油门的非线性动态逆控制律。最后通过仿真,验证了控制律的有效性。
1 尾流影响下的UAV建模
建立尾流影响下的UAV六自由度模型,首先需要常规飞机的六自由度方程[6],然后将尾流的影响引入到受油机外力和外力矩方程中去。考虑加油机尾流的影响,受油机所受气动力和外力矩的表达式为[7]:
式中:∇C=C0+ΔC,其中 C0为标称气动系数,ΔC为加油机尾流影响的诱导系数,其他符号的含义参见文献[6]。
2 非线性动态逆自主对接控制律设计
UAV自主空中加油可看作扰动影响下的位置或轨迹跟踪问题,因而控制律的任务是最终实现对受油点的精确跟踪。考虑UAV动力学特性,为简化控制律的设计,可以按照奇异值原理,将其分解为航迹、姿态、角速率和自动油门回路,分别进行设计,主要实现姿态和速度控制的功能。总体控制律设计结构如图1所示。航迹、姿态和角速率回路将加油机、受油机的状态量最终转化成受油机升降舵、副翼和方向舵偏角指令,实现对受油机姿态的控制;自动油门回路通过动态逆原理设计,将前向速度指令最终转化为油门杆指令,通过油门实现对速度的控制。

图1 控制律结构图Fig.1 Structure of the control law
2.1 航迹回路分析设计
航迹回路控制的目的是将期望的位置(xT,yT,zT)转换为飞机的航迹回路指令(χc,γc)和自动油门通道的前向速度指令uc。飞机航迹回路[V,χ,γ]T的微分方程无法表示成仿射非线性的形式,导致在设计航迹回路时无法应用动态逆,从而需要重新设计,采用常规的比例反馈方法对航迹回路控制律设计如下。采用比例反馈,并引入速度阻尼,将期望航迹转换为地平坐标系下的速度指令:

根据机体系与地平系的坐标关系,自动油门通道的机体前向速度指令可表示:

根据地平系与航迹系的坐标关系,航迹偏角指令可表示为:

2.2 姿态回路分析设计
姿态回路控制的目的是将航迹角指令转换为姿态角指令。在设计中采用姿态角[φ,θ,ψ]T来代替气流角[α,β,μ]T,考虑飞机协调转弯限制和爬升速率约束来确定俯仰指令θc和滚转指令。姿态角指令公式如下:

其中:

由机体系和航迹系的坐标关系,偏航角指令可表示为:

2.3 角速率回路分析设计
角速率回路控制的目的是将姿态角指令转换为姿态角速率指令,并最终求解飞机舵面偏转指令。
引入姿态角反馈,姿态角指令增量的导数通过如下的一阶滤波器获得:
用动态逆方法对飞机运动方程进行推导,并将式(10)代入可知,角速率指令为:

则:
其中:

由飞机运动方程可知,期望的总力矩为:

将飞机外力矩方程式(15)代入式(2),则飞机舵面偏转角指令可表示为:


2.4 自动油门分析设计
自动油门回路控制的目的是通过动态逆的方法,将机体前向速度指令转换为自动油门的控制指令,从而实现对飞机速度的控制。采用比例反馈,将机体前向速度指令误差转换为飞机期望的前向速度变化率:

式中:ku为设定的油门比例控制系数。
将式(17)代入飞机受力方程,则机体轴x方向的合外力Fx可表示为:

由外力平衡可知,期望的推力指令可表示为:

3 仿真结果及分析
为验证本文UAV自主对接控制律的有效性,以软管锥套式加油为例进行仿真。仿真条件如下:加油机翼展39.88 m,软管锥套式空中加油系统距右翼尖2.85 m,其初始高度为7 200 m,在x,y轴上位置分别为300 m,150 m,始终在x轴方向以VT=180 m/s保持定直平飞状态;UAV初始高度为7 050 m,在x轴方向以VR=180 m/s定直平飞,油门配平控制量为δT=55%,升降舵配平偏转角度δe=13°,方向舵和副翼配平偏转角均为零。采用Burnham模型[8],利用等效气动效应法,将非均匀的尾流对UAV的气动影响等效为均匀风场作用在其质心上,从而计算出诱导力和力矩[9-10]。
在UAV空中加油自主对接过程中,利用等效气动效应法计算等效尾流速度与角速度变化,结果如图2所示。
远距阶段,受油机追踪加油机的位置速度;近距阶段(即相对距离小于50 m时),以锥套作为追踪的对象。尾流作用下锥套在加油机系的运动规律[10]如图 3 所示。
受油机与加油锥套的对接轨迹如图4所示,受油机与锥套的相对位置误差如图5所示。
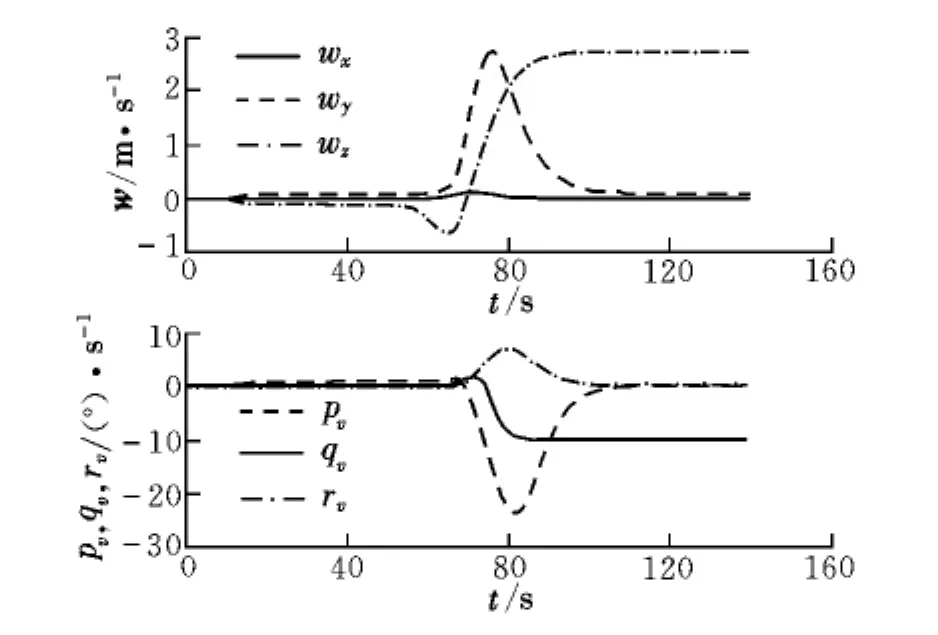
图2 等效尾流速度与角速度Fig.2 Equivalent wake speed and angular speed

图3 锥套在加油机系的相对位置Fig.3 Position of the drogue in tanker frame

图4 加油机与受油机的航迹Fig.4 Flight path of the tanker and receiver

图5 受油机与锥套的相对位置误差Fig.5 Position error between the drogue and receiver
仿真过程可近似划分为三个阶段。第一阶段,UAV快速减小与受油机的侧向和纵向的位置偏差,迅速实现了加油对准;第二阶段,UAV水平加速飞行,逐渐减小与锥套前向位置偏差,侧向和纵向始终与参考轨迹保持一致;第三阶段(即t=100~140 s期间),设计的对接控制律可以使UAV克服加油锥套的摆动影响,实现准确的位置跟踪,并于t=140 s时实现对接。对接过程中受油机部分状态量如图6所示,受油机控制量变化如图7所示。

图6 受油机部分状态量Fig.6 Part of the receiver state’s variables

图7 受油机控制量Fig.7 Control variable of the receiver
由仿真结果可知,基于动态逆的自主对接控制律有效地克服了加油机尾流、大气扰动等影响,使飞机状态变化更加平稳,收敛更加迅速。尤其在t=100 s后的对接过程中,UAV能够更加有效地克服加油锥套飘摆和对撞力的影响,体现了较强的稳定性和鲁棒性。
4 结束语
本文在UAV自主空中加油对接过程中采用非线性动态逆设计控制律,减少了线性小扰动模型的不确定带来的控制不确定因素,克服了加油机尾流、大气扰动等影响,实现了UAV自主空中加油对接控制;另外,在常规动态逆控制律的基础上进行了改进,采用姿态角代替气流角进行控制,考虑协调转弯和爬升速率约束,使控制更加稳定。最后通过仿真验证了该控制律的有效性。但由于气动参数在实际飞行中是不可测的,因此在应用中还需要使用自适应逼近机构逼近实际的气动参数。
[1] 董新民,徐跃鉴,陈博.自动空中加油技术研究进展与关键问题[J].空军工程大学学报:自然科学版,2008,9(6):1-5
[2] 王宏伦,杜熠,盖文东.无人机自动空中加油精确对接控制[J].北京航空航天大学学报,2011,37(7):822-826.
[3] 窦和锋,董新民,薛建平,等.无人作战飞机空中加油建模与近距机动控制律设计[J].飞行力学,2013,31(4):326-330.
[4] 邓婷婷,杨朝旭,孙绍山,等.非线性动态逆方法在飞行控制律设计中的应用[J].计算机测量与控制,2013,21(5):1236-1238.
[5] 龙晋伟,潘文俊,王立新.战斗机动态逆控制律对比研究[J].飞行力学,2013,31(4):297-300.
[6] Steven B L,Lewis F L.Aircraft control and simulation[M].Wiley:Interscience,1992:81,131-132.
[7] 肖业伦,金长江.大气扰动中的飞行原理[M].北京:国防工业出版社,1993:82-90.
[8] Waishek J,Dogan A,Blake W.Derivation of the dynamics equations of receiver aircraft in aerial refueling[J].Journal of Guidance,Control,and Dynamics,2009,32(2):585-597.
[9] 陈博,董新民,徐跃鉴,等.加油机尾流场建模与仿真分析[J].飞行力学,2007,25(4):73-76.
[10]王海涛,董新民,窦和锋,等.软管锥套式空中加油系统建模与特性分析.[J].北京航空航天大学学报,2014,40(1):92-98.
猜你喜欢
通信电源技术(2020年1期)2020-01-06
雷达学报(2017年6期)2017-03-26
通信电源技术(2016年5期)2016-03-22
天津大学学报(自然科学与工程技术版)(2015年10期)2015-12-29
汽车实用技术(2015年8期)2015-12-26
舰船科学技术(2015年8期)2015-02-27
中国航海(2014年4期)2014-11-29
航空世界(2014年7期)2014-09-24
电子设计工程(2014年18期)2014-02-27
电子设计工程(2014年18期)2014-02-27