
独立旋转车轮导向技术概览
2015-12-25 00:57:24刘晓宇
科技视界 2015年18期
刘晓宇
(西南交通大学牵引动力国家重点实验室,四川 成都 610031)
0 序言
低地板轻轨车辆是一种能使乘客在普通人行道上就能实现无高差上下车,不需要在路面设置高站台的轻轨车辆,给残疾人、年迈老人、推婴儿车的夫妇及任何携带物品和带行李的乘客和行动受到限制的人群提供了上下车和在车内行走的便利,自1984 第一辆现代化的低地板车才在瑞士的日内瓦投入使用以来,该类列车越来越受到乘客欢迎。要实现轻轨车辆的100%低地板化,就必须取消传统刚性轮对的车轴,这就使得车轮与车轴解耦的独立旋转车轮转向架在低地板轻轨车辆中应用广泛。
独立旋转车轮系统(以下简称独立轮)是相对于传统刚性轮对的概念,基本思想是通过轴承连接车轮与车轴,以代替传统轮对中轮轴的刚性固结。与刚性轮对相比,独立轮的自由度发生变化:车轮可绕车轴自由转动,而车轴不必转动,故可以取消公用车轴,或者用下凹型车轴代替普通直轴,从而为降低车辆地板面的高度创造条件。独立轮左右轮解耦合,即轮对的摇头和横移运动不再耦合,根据卡尔克蠕滑理论,纵向蠕滑力消失,就不会产生蛇行运动,不存在蛇行临界速度的限制,车辆能够达到更高的运行速度。独立轮导向能力差成为制约低地板轻轨车推广的因素之一。各国为解决独立轮导向问题进行了多项探索,得到了一些有益的经验。
1 独立轮踏面设计
由于独立轮导向主要依靠重力复原力,而重力复原力的大小与左右轮接触角差成正关系,但我国现有的磨耗型踏面是为刚性轮对设计,采用了较小的左右轮接触角差来提高蛇行稳定性,故需重新设计踏面形状以适应独立轮对。我国的沈刚教授等提出了接触角曲线反推法[1]。该方法利用接触角曲线的变化决定轮轨外形的变化这一逆向思维,在轨头、轨底坡、轨距确定的情况下,将现有的接触角曲线向左右大接触角差的方向修改,将修改后的接触角曲线上的点按照轮轨接触角与踏面轮廓线斜率的关系反推并积分得出踏面形状。反推得到的踏面,还需要计算其与钢轨的的轮轨接触几何关系,校核接触点分布、等效斜率、接触应力等轮轨接触特性。若不满足设计要求,则需重新修改接触角曲线,重复上述过程。在根据以上方法,在MATLAB 语言中,可以利用样条插值工具箱中的函数进行微分和积分计算。接触角曲线反推法实用性强,彻底解决了独立车轮的踏面设计问题。
2 自导向技术
独立轮因不存在纵向蠕滑力而丧失自导向能力,通过对走行部结构的优化改进可以使得其重新获得导向性。自调节独立车轮转向架是指只依靠轮轨间作用力就将车轮调节到径向位置的独立车轮转向架。德国Frederich 教授先后开发了EDF 独立车轮转向架[2]和EEF 自导向独立车轮副(见图1)是自导向独立轮走行部中的代表产品。当EDF 通过的半径较小曲线时,独立车轮的冲角很大,导向性能差,并没有投入到实际运营中。而单轴独立轮转向架EEF 自导向独立车轮轮副在德国许多城市的低地板车辆上有过应用。这种单轴走行部的左右独立车轮能够分别绕构架外侧的各自的回转中心旋转,从而能够利用重力复原力产生绕垂向转动的复原力矩,该力矩能够促使车轮自动向径向位置调节,使车轮在运行中保持与轨道平行[3]。但EEF 需要在紧凑的空间中安装复杂的结构,实际生产中成本和难度都较大。
3 独立轮转向架迫导向技术
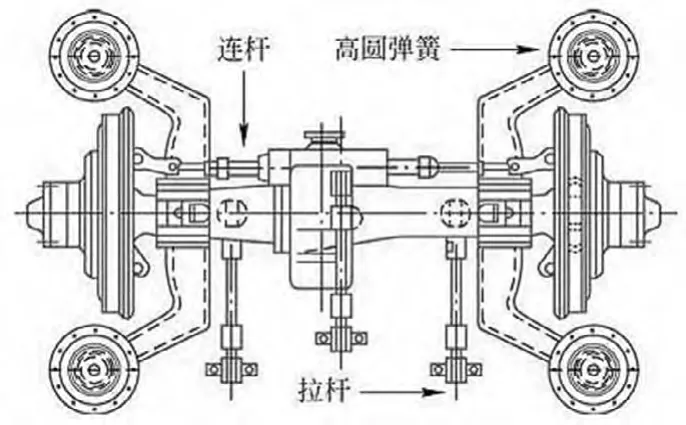
图1 单轴自调节独立轮轮副EEF
西班牙的TALGO 列车是独立轮技术应用最成功的典范[2]。每节车厢由三点支撑:前端铰接在前一车厢尾部横梁的中央,后端通过弹簧支撑在独立车轮单轴转向架上。独立轮采用大锥度踏面,并在车轮和车体之间布置了轮对径向调节机构。大锥度踏面能够产生的较大的重力复原力,铰接拖动的车辆连接方式使得相邻车厢的摇头角方向相反,相邻两单轴独立轮走行部的摇头角也相反,因而相邻轮对不会同时出现重力复原力和横向蠕滑力反向的情况,这就使车辆能在直道上实现自动对中复位。径向调节机构(见图2)约束了轮对的摇头运动,迫使轮对在直道上相对于车体不会发生相对摇头运动。曲线通过时,径向连杆上处于前后车体对角线上,即轨道曲线径向线上。
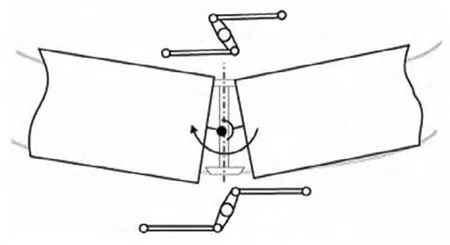
图2 Talgo 列车径向调节机构
4 独立轮反向踏面自导向技术
2012年,日本的须田益大等开发了一种具有自导向能力的反向踏面独立轮机构。轮轨接触点与独立车轮外侧的回转中心轴分别位于轨道内外两侧是EEF 能够实现自动导向的重要原因之一,类似于EEF,反向踏面独立轮的轮轨接触点与左右车轮的竖直回转中心轴也位于轨道两侧(见图3)。故该机构在能实现自动导向的同时,不需要连杆,简化了结构,有利于降低地板高度。研究人员经过仿真及模型车辆试验验证了反向踏面独立轮转向架在直道上能够实现自动对中,弯道上轮轨磨耗小,并能提高通过小半径弯道的临界速度[4]。
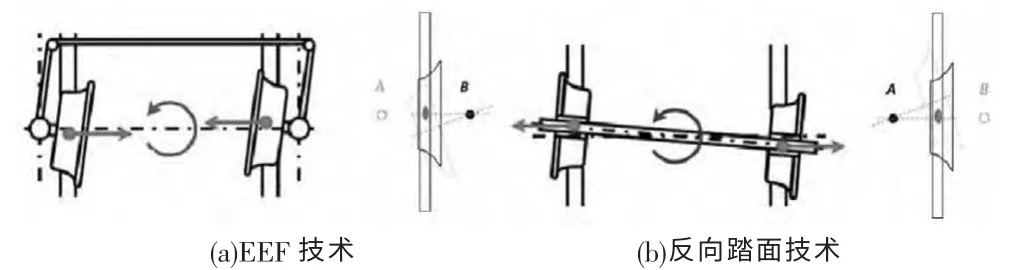
图3 及其轮轨接触点和回转中心位置
5 主动导向技术
相对于被动导向技术依靠重力复原力的横向分量克服横向蠕滑力实现导向,主动导向技术则是利用作动器控制轮对冲角或左右轮转速差进行导向。英国的Wikens 教授开发的直接导向轮副(见图4)就是控制车轮姿态实现主动导向的一种独立车轮转向架。其左、右两、个独立旋转车轮的转轴通过导向拉杆连接,以保证左、右车轮的摇头角相同。作动器根据相对轨道的横向位移的反馈量,控制拉杆水平横向位置,从而控制轮副的转角[5]。使用直接导向轮副的车辆取得了很好的导向效果,但是受限于车轮相对轨道的横向位移实时测量技术水平,尤其是在道岔处,工程实现将比较复杂。

图4 直接导向轮副
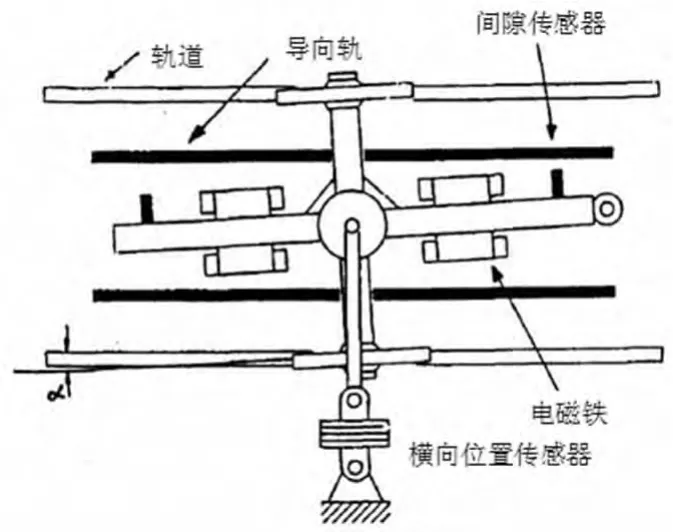
图5 第三轨导向系统
6 其他导向技术
日本Koyanagi 提出使用导向轨来提高独立轮所需的导向功能[6]。这种圆柱导向独立旋转车轮系统(CIW)模型(见图5)。沿着导向轨运行的圆柱形导向轮和连接导向轮和转向架构架的导向杆通过转向架可绕导向轮前面一点旋转的方式约束转向架的摇头运动,从而实现导向。但是该技术需要另行布置导向轨,成本过高,而且难以布置在道岔处,可实施性较低,仅停留在实验室试制层面。
7 结语
低地板轻轨车辆拥有巨大的应用前景和市场潜力,而独立轮转向架是实现车辆的低地板化的必然要求,但由于独立轮对因解耦导致导向能力差,限制了独立轮转向架在轨道车辆上的应用,故需要对国内外独立轮导向技术进行深入研究。根据目前国内外独立轮导向技术的研究现状,解决独立车轮导向难题的措施大致可归纳为以下3个方面:一是对独立车轮踏面进行特殊设计,加大左、右车轮踏面的接触角差,以增加重力复原力;二是对独立轮转向架的结构进行优化设计,利用径向转向架的结构特性或者布置迫导向机构使独立轮转向架具有导向功能;三是采用主动悬挂技术,主要是根据左右车轮状态信息反馈,由作动器对独立轮施加力矩控制其摇头姿态。在独立旋转车轮系统的实际应用中,西班牙Talgo 列车的成功经验最值得借鉴,故有必要进一步对Talgo 列车的导向性能进行研究。
[1]沈钢,叶志森.用接触角曲线反推法设计铁路车轮踏面外形[J].同济大学学报:自然科学版,2002,30(9):1095-1098.
[2]任利惠.独立车轮导向技术研究[D].上海:同济大学铁道与城市轨道交通研究院,2006.
猜你喜欢
机械工业标准化与质量(2022年7期)2022-08-12 02:12:18
科学导报(2022年6期)2022-02-06 10:50:13
科学家(2021年24期)2021-04-25 16:55:45
铁道通信信号(2020年10期)2020-02-07 01:01:02
测控技术(2018年8期)2018-11-25 07:42:24
铁道通信信号(2016年6期)2016-06-01 12:10:20
中国铁道科学(2015年2期)2015-06-26 08:34:46
中国铁道科学(2015年6期)2015-06-21 06:54:48
中国铁道科学(2015年5期)2015-06-21 06:53:22
铁道学报(2015年9期)2015-05-10 03:04:41
