抬升法在房屋纠偏加固处理中的应用
2015-12-22 14:39姚建平蔡德钩李中国郭增强张千里
铁道建筑 2015年1期
姚建平,蔡德钩,李中国,郭增强,张千里
(1.中国铁道科学研究院 铁道建筑研究所,北京 100081;2.高速铁路轨道技术国家重点实验室,北京 100081)
抬升法在房屋纠偏加固处理中的应用
姚建平1,2,蔡德钩1,2,李中国1,2,郭增强1,2,张千里1,2
(1.中国铁道科学研究院 铁道建筑研究所,北京 100081;2.高速铁路轨道技术国家重点实验室,北京 100081)
介绍了某6层框架剪力墙结构房屋抬升法纠偏的整个过程。通过在地基压入锚杆静压桩提供反力,在筏板上植筋架设反力梁,在桩顶设置千斤顶,辅助地下车库堆载加压的抬升纠偏方法,成功地完成了房屋的纠偏,使得房屋的倾斜率由5.5‰变为2‰以内。在纠偏全过程采用高精度测量机器人实时跟踪监测筏板基础的沉降值,是房屋成功纠偏的保证。
纠偏加固 抬升法 堆载加压法 锚杆静压桩
1 工程概况
某房屋住宅建筑为地上6层地下1层,地上住宅为钢筋混凝土剪力墙结构,房屋地上总高度17.33 m,占地面积约1 300 m2,地下1层高度3.6 m,基础形式为筏板基础。
由于该房屋地基施工期间,基坑未及时回填,遭受雨水浸泡后,基础出现不均匀沉降。采用锚杆静压桩进行了加固处理,加固完成未产生新的沉降变形,变形发展已经稳定。但在测量后期楼面时发现,房屋的东南角出现了倾斜,最大倾斜值达到5.5‰。已不满足《建筑地基基础设计规范》(GB 50007—2011)建筑物的地基变形容许值4‰的要求,对房屋后期装修及设备安装带来了很大的困难,因此需要对该房屋进行纠偏加固处理。
1.1 场地工程地质条件
该工程所在位置地貌属于山麓坡积裙地貌,地面高差较大,北高南低、西高东低。据岩土工程地勘报告,场地内基础筏板以下的地层自上而下主要为:①人工填土(粉质黏土素填土,杂填土),一般厚度为0.3~5.0 m,部分区域人工填土厚度达8.4 m;②第四系坡洪积成因的粉质黏土、碎石土(夹碎石透镜体);③全风化、强风化的砂岩;④页岩和泥岩。
地下水类型为上层滞水,主要含水层为粉质黏土杂填土,以大气降水、绿化灌溉等为主要补给方式,以蒸发为主要排泄方式。地下水位变化受人为活动和季节性降水影响较大。
1.2 原有房屋地基处理情况
由于场地上覆地层承载力较低无法满足楼房基础承载要求,因此对地基进行了处理。处理方式为回填采用1 500 kN级满夯处理,然后采用CFG桩加固。CFG桩的设计参数:①桩径0.4 m,桩间距1.8 m× 1.8 m;②桩身混凝土强度C20;③桩长以达到岩石持力层作为控制条件。
1.3 房屋倾斜状况
房屋整体倾斜方向为北向南倾斜,西向东倾斜,倾斜超标的房间集中在1单元和2单元,3单元没有倾斜超标。倾斜最严重的部位是楼体东南角,倾斜方向为由北向南,最大倾斜率达到约5.5‰,需要纠偏的范围如图1所示。
2 房屋纠偏处理设计
2.1 纠偏加固方法
房屋地上为钢筋混凝土剪力墙结构,基础形式整体为筏板基础,前期加固处理采用了锚杆静压桩进行加固。由于房屋倾斜方向为北向南倾斜,而房屋北侧为地下车库,车库筏板与楼房的筏板基础连接为整体,因此包括掏土法等降低楼体标高的迫降法不具有作业条件。综合分析结构特点,工程地质、水文地质、周围环境因素,该房屋设计采用抬升法或以抬升法联合其他辅助方法进行纠偏加固处理较为适宜。采用锚杆静压桩提供反力,千斤顶在沉降大的位置抬升,同时结合另一侧堆载方法辅助迫降完成房屋纠偏施工,楼体抬升完毕后对地基进行浅层填充注浆和深层加固地基注浆。

图1 房屋抬升前测量基准面高程
2.2 抬升量
为考虑纠偏后可能会产生一部分回倾量,因此纠偏施工期间的目标值略高于规范要求,本次设计的纠偏目标值控制在2‰。当施工完成,结构变形稳定后确保倾斜量控制在规范限值以内。根据测量结果,南北向在东侧单元内最大高程差约为88 mm,楼体南北向宽度为16.8 m,倾斜率为5.23‰。按2‰的目标纠偏则需要恢复的高程差最大约54.3 mm。因此,实际恢复高程差最大按55 mm控制。
考虑施工安全及《建筑物倾斜纠偏技术规程》每次的抬升量不大于10 mm的要求,将抬升区域分为6个,每个区域抬升荷载分6级逐步实施,各区的抬升量如表1所示。实际抬升量依据现场抬升过程中监测进行动态调整,但每一次抬升的最大量不得超出表中目标抬升量,6个加载级不能满足设计要求时,增加分级数。
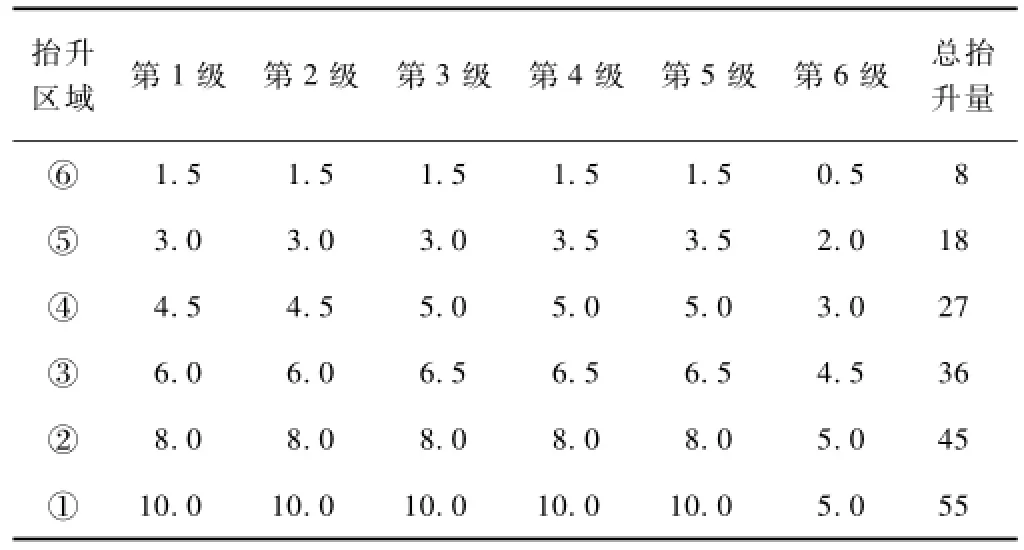
表1 分级加载的目标抬升量mm
2.3 抬升力
各级抬升过程中千斤顶的抬升力按6级加载,每一级千斤顶的抬升力控制量如表2。加载轮回数量依据楼体倾斜率设计要求和每抬升循环的目标抬升量控制。具体记载轮回数量和增加加载量依据监测动态调整。
抬升力同时根据油压表及荷载传感器的数据进行控制,同时将抬升位移量作为控制首要指标。当抬升位移量达到目标抬升量时,可不需达到预计加载值;当加载到目标荷载,但未达到目标抬升量时应具体分析原因,然后确定下一步加载方案。

表2 每轮千斤顶抬升力控制量kN
3 抬升纠偏施工
依据设计要求,该房屋的抬升纠偏施工流程如图2所示。关键施工环节包括:补锚杆静压桩、循环加载抬升纠偏,浅层、深层注浆及抬升监测。
3.1 锚杆静压桩施工
锚杆静压桩桩体选用直径为203 mm壁厚为6 mm的热轧无缝钢管,钢管桩中间灌注C25的混凝土。根据反力架的高度,钢管加工成1.5 m一节,第一节下端做成锥形,锥尖长300 mm。压桩孔上表孔径240 mm,下表孔径300 mm,呈向下的喇叭口形。压桩锚杆采用高强化学锚栓,规格为M30 mm×530 mm,每个桩头设置6根,植入筏板内380 mm,外露150 mm。锚栓应严格定位,成孔应垂直,确保锚固力。为避免筏板钢筋影响,应采用水钻的方法成孔,成孔后将孔内残渣清洗干净,并用热风枪吹干。锚栓在施工前进行3根抗拔试验,单根极限抗拔力应>240 kN。静压桩最大压桩荷载为700 kN,桩的设计承载力为300 kN。抬升纠偏完毕后,锚杆静压桩进行桩头处理。
3.2 循环加载抬升纠偏
房屋抬升纠偏在锚杆静压桩施工完毕,分区安装好千斤顶后进行。本工程千斤顶布置在6个区域内,共布置108个,所有千斤顶带有机械自锁功能,每组千斤顶均设置高精度的压力和变形监测传感器。循环加载抬升分5个阶段进行:称重预抬升、正式抬升、补抬升、超抬升和抬升后沉降监测。具体加载流程为:
1)6个抬升区上的108个千斤顶同时预加荷载称重。1区加载到150 kN,2~4区加载到200 kN,5~6区加载到250 kN。
2)正式抬升阶段。从第1区开始,各区域千斤顶逐渐分步施加荷载(加载量见表2),每加载完1个区域后,调整前面抬升区的千斤顶荷载,保持每个千斤顶的抬升力。
3)根据楼体监测数据结果,按照步骤2的方法继续加载,直到楼体开始整体变形。
4)继续进行新一级加载。按照每个抬升循环的目标抬升量(表1)进行控制,按照第2步的加载方法,千斤顶增加的吨位数依据每一个加载等级的目标抬升量进行动态调整。
5)完成每一个循环施工后,停止所有千斤顶的抬升施工作业,全面检查千斤顶的工作状态,综合分析楼体监测数据,与预期抬升量进行核对。直到筏板的抬升与楼体整体变形完全同步后,才能进入下一轮抬升作业。下一轮抬升作业依据实际抬升量与目标抬升量的差异进行动态调整,根据现场抬升测试结果,对该房屋进行了一次补抬升工作。
6)最终加载以倾斜率满足设计要求的不大于2‰控制,抬升完毕后进行房屋沉降观测。根据沉降观测结果,房屋抬升达到了设计和规范要求,沉降稳定,不需要进行超抬升施工。

图2 房屋抬升纠偏施工工艺流程
4 抬升效果
房屋抬升纠偏全程监测内容包括结构主体倾斜监测、沉降监测、裂缝监测、主要受力构件的应变监测等4项内容。监测采用自动化实时监测技术,实时反馈纠偏施工过程中各控制参数的变化,起到了动态指导抬升施工的作用。
4.1 沉降监测
本次沉降监测在楼体纠偏区域的外墙及窗台设置观测棱镜11个,设置基准棱镜2个,利用高精度测量机器人实时全程跟踪监测。纠偏顶升区域的筏板基础下设置基准桩,安装高精度位移计12个,监测筏板竖向位移变化,直接反馈到抬升控制台。图3为高精度测量机器人抬升纠偏全程监测过程,抬升准备阶段、正式抬升阶段、补抬升阶段和抬升后阶段,从图中可以看出,本次抬升纠偏效果完全达到了设计要求的55 mm抬升要求,抬升后沉降稳定,满足设计和规范要求,成功完成了房屋抬升纠偏。
4.2 结构主体倾斜监测
抬升过程中在首层及顶层东南角的主体结构上各设置倾斜仪,实时监测纠偏施工过程中建筑物的倾斜变化。电子倾斜仪的监测结果可与由沉降监测结果计算的倾斜变化相比较。表3为抬升纠偏前后主体倾斜监测结果。从表中可以看出抬升后房屋倾斜率为1.0‰~1.74‰之间,满足规范规定的倾斜率小于4‰的要求,同时也满足了设计倾斜率小于2‰的要求,成功完成了房屋抬升纠偏。
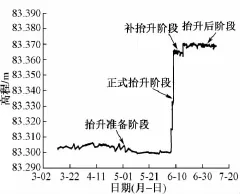
图3 抬升纠偏过程典型监测点沉降观测

表3 抬升纠偏前后主体倾斜监测结果‰
5 结论
1)本工程采用抬升法并辅助堆载加压法成功地完成了该房屋的抬升纠偏工作,倾斜率由原来的5.5‰变为2‰以内,房屋沉降稳定,满足设计和规范要求。
2)抬升纠偏过程中采用多种监测手段,实现了房屋状态的动态监测,有效地指导了整个纠偏过程的实施,动态监测是本工程纠偏成功的重要保证。工程所取得的成果和经验可供其它抬升纠偏工程参考。
[1]唐业清.建筑特种工程新技术[M].北京:中国建筑工业出版社,2013.
[2]唐业清.建筑物移位纠倾与增层改造[M].北京:中国建筑工业出版社,2008.
[3]中华人民共和国住房和城乡建设部.GB 50007—2011建筑地基基础设计规范[S].北京:中国建筑工业出版社,2011.
[4]中华人民共和国住房和城乡建设部.JGJ 270—2012建筑物倾斜纠偏技术规程[S].北京:中国建筑工业出版社,2012.
[5]李启民.建筑物纠倾工程设计与施工[M].北京:中国建筑工业出版社,2011.
[6]郭子珍,侯东亚,尤相骏,等.远程无线遥控测量机器人变形监测系统及其应用[J].测绘通报,2008(7):71-72.
[7]练操,范萌,陈长军.基于测量机器人的远程遥控技术开发[J].人民长江,2011,42(22):89-91.
[8]徐忠阳.全站仪原理与应用[M].北京:解放军出版社,2003.
Application of lifting method in deviation-rectifying and reinforcing treatment of building
YAO Jianping1,2,CAI Degou1,2,LI Zhongguo1,2,Guo Zengqiang1,2,ZHANG Qianli1,2
(1.Railway Engineering Research Institute,China Academy of Railway Sciences,Beijing 100081,China; 2.State Key Laboratory for Track Technology of High-speed Railway,Beijing 100081,China)
The whole deviation-rectifying and reinforcing treatment process of a 6-story framework shear wall structure building was introduced in this papaer.As counterforce is generated by installing anchored static-pressure piles in the foundation,counter-force beams and jacks are set respectively at the embedded steelbars of the raft and at the pile tips,so as to heap loading on the underground garage and coordinate the pressure against it.Thanks to such treatment,the leaning ratio of the building declined from5.5‰to2‰.High-accuracy measuring robot is used to monitor the settlement of the raft,which stands as the key to the success of the deviation-rectifying and reinforcing treatment of the building.
Deviation-rectifying and reinforcing treatment;Lifting method;Heaping load for pressure;Anchored static-pressure pile
TU746.3
A
10.3969/j.issn.1003-1995.2015.01.15
1003-1995(2015)01-0067-04
(责任审编 赵其文)
2014-09-20;
2014-11-29
中国铁道科学研究院院基金(1451ZD2604)
姚建平(1976—),男,湖北江陵人,副研究员,硕士。
猜你喜欢
儿童与健康(幼儿教师参考)(2022年9期)2022-09-23
建材发展导向(2021年19期)2021-12-06
建材发展导向(2021年20期)2021-11-20
建材发展导向(2021年15期)2021-11-05
北京交通大学学报(2021年2期)2021-06-03
河北画报(2020年8期)2020-10-27
制造技术与机床(2019年10期)2019-10-26
中华建设(2019年7期)2019-08-27
制造技术与机床(2018年8期)2018-10-09
制造技术与机床(2018年9期)2018-09-19