
基于驾驶模拟器的山区公路路段安全评价方法的检验*
2015-12-21 03:17:10张兰芳
交通科技 2015年4期
王 品 张兰芳
(同济大学道路与交通工程教育部重点实验室 上海 200092)
基于驾驶模拟器的山区公路路段安全评价方法的检验*
王品张兰芳
(同济大学道路与交通工程教育部重点实验室上海200092)
摘要为了对山区公路路段进行安全评价,以运行车速和行车轨迹偏移量为评价指标,提出了基于驾驶模拟器的安全评价方法。为了验证该方法的有效性,选取山区路段进行了实测实验,与基于驾驶模拟器的评价结果进行对比。结果显示2种情况下运行车速和行车轨迹偏移量差异性不显著,表现出相似的变化趋势,且评价得出的危险路段一致,表明了基于驾驶模拟器的安全评价方法的可靠性。
关键词安全评价方法驾驶模拟器山区公路路段运行车速轨迹偏移量
据统计,在公路交通事故中,约有20%的事故发生在山区公路上[1],而山区由于地形地质情况复杂,一旦发生交通事故,多为车毁人亡的恶性交通事故。山区的特点是山高谷深,高差大,地形、地质条件复杂,导致对路线平、纵、横3个方面产生较大的约束[2]。有些道路`为了满足设计规范中的指标要求,只注重线形指标是否达到标准,而对线形的安全性考虑不足,如未充分考虑线形是否连续、是否存在视距不足等问题,从而导致交通事故繁发。因此,探索适合山区公路道路的安全评价方法,以提高山区道路的行车安全水平,意义重大。
传统的路线设计方法以汽车行驶理论为基础,假设汽车的行驶状态处于一种理想状态,即汽车严格地按照设计行车轨迹线(一般为行车道中心线)行驶。设计行车轨迹线是驾驶员追踪的理想曲线,如果严格按照该线行驶,将能在最大程度上保障行车安全。然而,严格按照理想轨迹线行驶却非易事,驾驶员的驾驶行为是一个牵涉因素较多的复杂过程。同时,线形设计要素与实际行车速度不相容性,线形设计要素之间不相容性,以及线形的行车速度标准的不一致等方面,也导致了普通的道路设计方法在山区低等级公路中存在一定的安全隐患[3]。特别是弯道路段,是交通事故预防和交通安全改善的难点和重点所在。在弯道处行车,驾驶员的操作会存在一定难度,行车速度和行车轨迹会与设计车速和车道中心线出现偏差。行车轨迹偏移量的大小与行车速度的高低与道路交通安全水平密切相关[4]。山区的交通事故往往是由于弯道处车速过高或驾驶不慎导致车辆偏离车道而引发的。在实际中,车辆的行车轨迹与行车速度也较易观测得到。因此,以行车速度和行车轨迹偏差(即行车轨迹与车道中心线的偏差)作为山区道路安全水平的评价指标,具有一定的可靠性和可行性。
但对于一些低等级山区道路,由于车流量较少,加之基础设施匮乏,很难采集到足够的车速与行车轨迹数据。因此,寻找一种行之有效的安全评价方法很有必要。近年来,不少研究者开始把驾驶模拟器引入到交通安全评价中来,利用驾驶模拟器构建驾驶环境,进行道路安全评价[5-6]。驾驶模拟器可以便捷、有效地采集数据,且降低了实际实验中的行车风险,得到广泛应用。但近来一些学者对基于驾驶模拟器得出的安全评价结果的可靠性也提出了质疑[7]。为了寻找一条便捷、高效地提高山区公路安全水平的方法,研究中以山区公路路段为对象,根据实测实验采集车速与行车轨迹信息,对特定路段进行安全评价;建立模拟驾驶场景,基于驾驶模拟器对该路段再次进行安全评价;对比2种情况下的评价结果,验证驾驶模拟器用于研究山区公路安全问题的可靠性和可行性。
1 研究方法描述
1.1实地观测实验
1.1.1评价路段的选取
实验地选取四川成都地区的山区公路——福洪乡杏花村的四级公路为实验地点。为了减少其他因素对实验数据的干扰,实验路段选取非机动车、行人、农用车较少的K0+000~K4+899约4km的路段为评价路段。该路段为双向2车道,设计车速为20km/h,路基宽度6m,路面宽度5.5m,路拱横坡度2%。路面状况良好,车辆基本处于自由流状态,且货运车辆的比例较低,这为实验研究的开展提供了较好的观测条件。研究主要观测的是小轿车的运行车速和行车轨迹偏移量。
选所评价路段为线形设计较差的路段,最大圆曲线半径200m,最小圆曲线半径15m(基于超限设计原则设计)。大部分曲线段无缓和曲线。
1.1.2实验过程
实验采用的主要实验设备包括测速仪(4台雷达枪和2台MetroCount测速仪)和摄像机(5台VCR摄像机)。实验数据的采集采用断面法,包括对运行车速和行车轨迹偏移量的采集。理论上,为了能更好地反映整个曲线段的行车轨迹特性,应设7个数据采集断面,分别为ZH点前约60m处、ZH点、HY点、QZ点、YH点、HZ点及HZ点后约60m处的断面。但由于实验路段为低等级山区公路,绝大多数弯道处没有缓和曲线,且相邻曲线间距离较短,因此研究中共设5个数据采集断面,分别为ZY点前约30m处、ZY点、QZ点,YZ点及YZ点后约30m处的断面。图1展示了实验场地及实验设备的布置情况。速度的采集可以用雷达枪和MetroCount测速仪来获取。轨迹偏移量的采集略微复杂,首先在曲线段处按25cm的间隔画上刻度,然后从视频中提取车辆驶过的轨迹得到与车辆中心线的轨迹偏差。
1.2驾驶模拟实验
1.2.1驾驶模拟器介绍
试验所采用的是交通行为与交通安全驾驶模拟器。该驾驶模拟器主要由硬件和软件2部分组成。硬件系统包括驾驶舱、计算机、投射仪、显示屏、运动液压系统等;软件系统包括道路环境的计算机实时动画生成,汽车行驶动态仿真,声响模拟,网络控制,操作平台等。
该驾驶模拟器拥有运动系统为8自由度运动系统。驾驶舱为封闭的刚性结构,驾驶车辆置于舱体中央,舱内设有5个投影系统,可将构建的道路场景以250°范围投影到球形幕上。模拟驾驶时,车辆的速度、加速度、转向盘转角、刹车性能、偏离车道中心线的距离等一系列参数可实时地输出到设备控制室。驾驶模拟器见图1。

图1 驾驶模拟器
1.2.2模拟驾驶过程
(1) 模拟驾驶场景。模拟驾驶的场景根据福洪乡杏花村实验路段的路线设计指标构建而成,在最大程度上保持与真实环境下的一致性。模拟场景见图2。
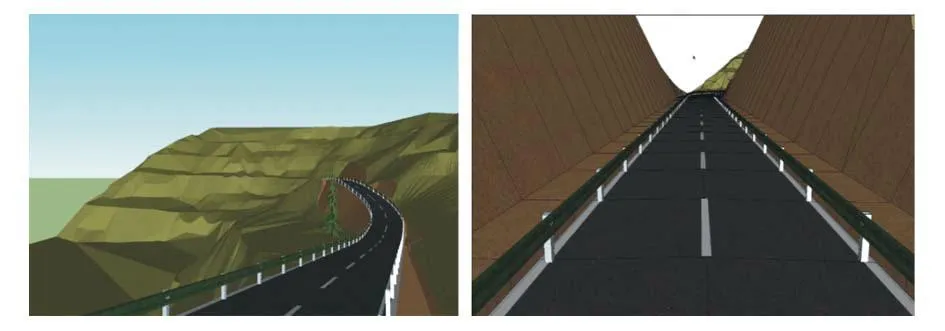
图2 模拟驾驶场景
(2) 驾驶员的招募。驾驶实验由20位志愿者实际操作,每人在不同的时间驾驶次数为3~5次。驾驶志愿者年龄在22~53岁之间,驾龄为3~10年,均无违法驾驶经历。经过筛选,得出的有效车速与轨迹的样本量约为323组。
(3) 驾驶模拟过程。实验开始前,详细地给驾驶员讲解有关驾驶操作的注意事项,并进行试驾训练。驾驶员需在特定的驾驶场景下进行10~15min的驾驶模拟,进行加速、减速、刹车、转弯等操作,以熟悉驾驶模拟器的操作过程。
当实验正式开始,驾驶员按照平时的行车习惯在所构建的场景中行驶。
2 路段安全评价结果对比分析
采用车辆运行速度和轨迹偏移量作为路段的安全评价指标,对实测数据和通过模拟驾驶得出的数据进行了分析,因篇幅所限,仅给出了部分具有代表性路段的运行车速和轨迹偏移的分析结果,其他曲线的评价过程类似。
2.1基于实测实验的安全评价结果
(1) 运行车速分析。对几处具有代表性的平曲线路段的5个特征点的运行车速进行分析,统计见表1。

表1 运行车速统计分析表 km·h-1
(2) 行车轨迹偏移量分析。代表路段行车轨迹偏移量统计见表2。

表2 行车轨迹偏移量统计分析表 cm
由各曲线段的车速及轨迹偏移观测的分析结果,可得以下主要结论。
在小半径曲线(R=20m)段上,由于线形条件差,车辆的运行车速较低,但是轨迹偏移量较大;在半径较大的曲线段,车辆运行车速较高,轨迹偏移量相对较小。由此可见,在山区公路上,平曲线半径过小会导致车辆偏移过大,存在安全隐患,尤其在车道宽度较窄、一边临沟壑的道路上,不仅会加大驾驶员的紧张心理,更易因车辆偏离车道太大而导致翻下悬崖的事故发生。
对于半径过大的平曲线路段,虽然行车轨迹偏离车道中心线较小,但运行车速普遍较高,甚至高出设计车速的1倍多。低等级山区公路上如果线形指标过高,往往导致车辆以较高的车速行驶,这种在低等级公路上高速行驶的车辆最易因刹车不及时而引发交通事故。所以,线形指标过高的路段也是应该格外引起注意的路段。
另外,还可以发现,一般情况下,车辆在进曲线前开始控制车速,在曲线中减速较多且保持较低数值,在即将出曲线时开始增高,可以反映出驾驶员在发现曲线,进入曲线和驶出曲线的过程中对于车速控制大体表现为一个从预减速到减速再到加速的变化过程。从各曲线段的均值及行车轨迹侧向偏移量来看,车辆在曲线段内的行驶轨迹,存在着进入曲线时朝曲线内侧偏移,出曲线时向曲线外侧偏移的运动趋势。
2.2基于驾驶模拟器的安全评价结果
通过驾驶模拟实验,同样可以得到车辆的运行车速和行车轨迹偏移量。通过对比驾驶模拟数据与真实数据发现,二者具有极为相似的数据变化趋势,且数据绝对值较为接近。为了避免重复和节省篇幅,仅给出模拟驾驶情况下和实测环境下运行车速和轨迹偏移量的方差对比分析。
(1) 运行车速对比分析。见表3。
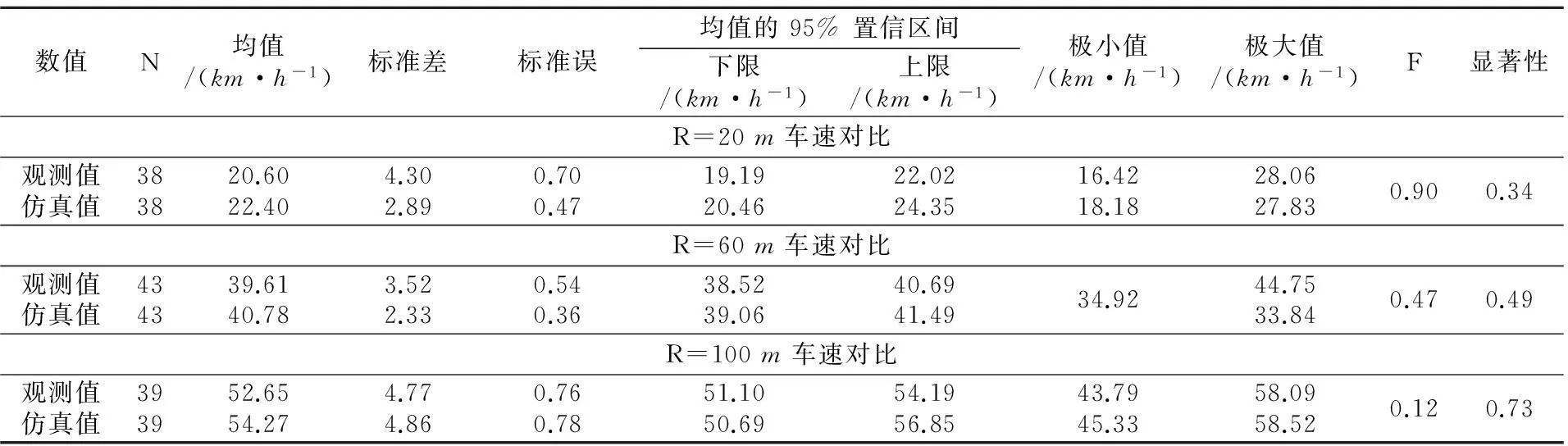
表3 仿真实验与实地观测车速方差分析表
由表3可见,检验统计量F值均较小,低于1.0,显著性数值均大于0.05。说明驾驶模拟情况下行车速度和实验观测值两者之间不存在显著差别。
(2) 轨迹最大偏移量对比分析。见表4。
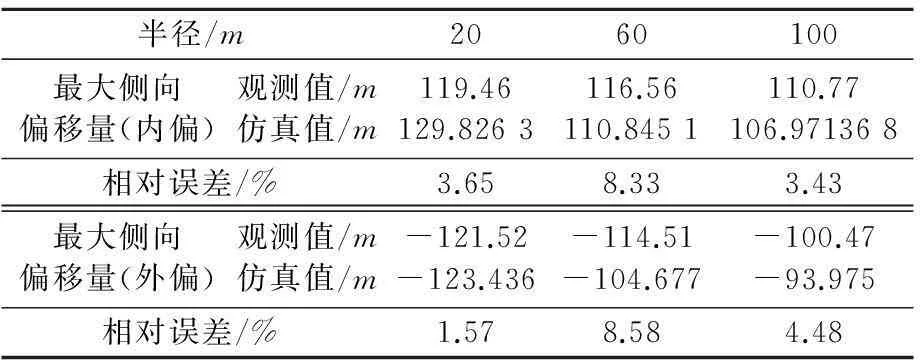
表4 仿真实验与实地观测行车轨迹侧向偏移误差分析表
由表4可见,对于轨迹最大偏移量来说,其模拟驾驶数据和实验观测值相对误差均在10%以内,最小为1.57%,最大为8.58%,平均误差5.0%,总体来说误差处于较小范围,即模拟数据与实测数据不存在明显差异。
2.3小结
由以上分析可见,无论运行车速还是行车轨迹偏移量,实测数据和模拟数据都不存在显著性差异,表明基于驾驶模拟器对山区公路进行安全评价具有一定的可靠性。由于基于实测实验的安全评价需要采集大量数据,实验的实施需要耗费大量的人力、物力,且易受天气、设备、周围环境的影响,因此,在具有较完整的线形资料的情况下,采取基于驾驶模拟器的安全评价方法对路段的安全性进行评估是一种行之有效的方法。
3 结语
为了解决山区公路数据收集困难的难题,提出了基于驾驶模拟器的安全评价方法。为了验证所提方法的可靠性,以运行车速和行车轨迹偏移量为评价指标,分别通过实测实验和驾驶模拟实验,对山区低等级公路几处具有代表性的路段进行了安全评价。经过对比分析2种情况下运行车速和轨迹偏移量的差异性发现,实验观测结果与模拟仿真结果不仅表现出相同的趋势,而且差异性不显著。这表明采用基于驾驶模拟器方法对山区公路进行安全评价不仅是一种便捷、高效的安全评价方法,而且具有一定的可靠性。
另外,通过实测和模拟数据反映出,过小的曲线半径会增加驾驶员驾车的紧张感,如果操作不当,容易引发交通事故,是安全水平较低的路段。当平曲线半径过大、行车条件较好时,虽然行车轨迹偏移量不大,但运行车速较高,且远远高出路段的设计车速,如果前方出现突发情况,往往因刹车不及时导致交通事故。所以,在低等级公路路段上采用较高的设计指标也属于安全水平较差的路段,存在安全隐患。
参考文献
[1]崔庆红.山区公路安全隐患分析和改善技术研究[J].交通安全,2011(14):138-139.
[2]范翔.山区公路安全评价[D].西安:长安大学,2004.
[3]王健.道路安全理念在山区公路设计中的应用[J].交通科技,2015(1):182-184.
[4]冯浩,李江,王富贵,等.山区双车道公路安全隐患分析和改善技术研究[J].公路交通科技,2006(11):159-161.
[5]丁立,熊坚,何玉川.基于驾驶模拟器的道路安全评价方法[J].中国公路学报,2007(3):90-92.
[6]韩丽,张少颖,胡庆贺.驾驶模拟在公路安全设计与运行中运用的研究[J].中外公路,2013,33(3):320-323.
[7]刘兆,熊坚,郭凤香.不同平面线形下驾驶模拟器速度有效性验证[J].华东交通大学学报,2012,29(4):69-72.
收稿日期:2015-03-13
VerificationofRoadSafetyEvaluationMethodon
MountainousHighwayBasedonDrivingSimulator
Wang Pin, Zhang Lanfang
(SchoolofTransportationEngineering,TongjiUniversity, 4800Cao'anHighway,Shanghai201804,China)
Abstract:Due to the high frequency of accidents in mountain areas, road safety evaluation based on driving simulator was put forward to assess the road safety of mountainous highway with the indexes of vehicle speed and deviation of traveling trajectory. To verify the feasibility of the proposed method, field test was conducted on a mountainous highway and the results were compared with those derived from the simulated experiment. Results show that the variation trends of vehicle speeds and trails were consistent and their differences were small, which indicats that the driving simulator is effective to be used in the safety evaluation of mountainous highway.
Key words:road safety evaluation; driving simulator; mountainous highway; vehicle Speed; traveling trajectory
DOI10.3963/j.issn.1671-7570.2015.04.040
*国家科技支持计划课题(2014BAG01B05)资助
猜你喜欢
地理空间信息(2022年3期)2022-04-01 14:16:14
小哥白尼(趣味科学)(2021年6期)2021-11-02 05:23:48
故事作文·高年级(2021年4期)2021-05-06 03:20:04
小哥白尼(神奇星球)(2021年11期)2021-03-08 09:00:18
汽车维护与修理(2018年1期)2018-04-04 01:13:22
制造技术与机床(2017年7期)2018-01-19 02:29:53
测绘工程(2017年3期)2017-12-22 03:24:50
汽车维护与修理(2015年5期)2015-02-28 12:16:34
装备环境工程(2015年5期)2015-02-28 01:20:24
警察技术(2015年6期)2015-02-27 15:38:33
