
下肢康复机器人对脑卒中偏瘫患者下肢功能修复的影响
2015-12-19 05:18李坤彬姚先丽孙平鸽张娅丽
中国实用神经疾病杂志 2015年13期
李坤彬 姚先丽 孙平鸽 张娅丽
郑州大学附属郑州中心医院神经康复科 郑州 450007
本文旨在对存在下肢功能障碍的脑卒中患者分别给予下肢康复机器人辅助康复训练和常规康复训练,从多角度综合评价偏瘫患者康复训练过程中肢体功能的恢复情况,为研究康复机器人对脑卒中偏瘫下肢运动功能的恢复提供临床依据。
1 资料与方法
1.1 一般资料 随机选取64例2012-10-2013-11收治的脑卒中偏瘫下肢运动功能障碍患者。选择标准:(1)符合脑卒中诊断标准——《各类脑血管疾病诊断要点》[1],并经CT或MRI确诊;(2)患者治疗后生命体征良好,病情较为稳定,神志清楚,能配合治疗。排除标准:(1)由于其他神经肌肉和骨关节疾病造成步行能力障碍者;(2)由于颅脑外伤或肿瘤术后等造成的偏瘫者;(3)患有严重高血压未控制或合并其他心血管系统严重疾病者;(4)有精神症状、认知及理解障碍或其他严重障碍导致无法配合研究者;(5)不愿意参加研究者。按照随机数字表法将64例患者分为实验组和对照组,随机数字为奇数者为实验组,偶数者为对照组,每组32例。对照组男21例,女11例;平均年龄(57.3±11.2)岁;平均病程(95.7±40.3)d;左侧偏瘫17例,右侧15例;脑梗死24例,脑出血8例。实验组男21例,女11例;平均年龄(59.0±9.7)岁;病程(96.0±43.1)d;左侧偏瘫14例,右侧18例;脑梗死25例,脑出血7例。2组一般资料差异均无统计学意义(P>0.05),具有可比性。
1.2 方法 2组均给予常规康复治疗,包括运动疗法(PT)和作业治疗(OT);每项训练各进行30min,1次/d,6次/周,共持续8周。试验组除常规下肢功能训练外,还进行下肢康复机器人强化训练。该机器人系统能控制患者髋、膝、踝关节活动,确保上述肢体在正确运动方式下重复训练。起始训练阶段由医师将患者下肢固定于机械腿中,根据患者病情调整床位的倾斜角度,从而实现在不同程度减重。同时在患者关节处安上传感器,能同时显示患者髋、膝、踝关节是否有抵抗;足底部位也安装传感器,以及时了解患者足跟及前脚掌受力情况。当患者能自行起立后,医务员则在患者身旁予以保护协助,借助机械腿辅助患侧下肢摆动、髋伸展及骨盆旋转,整个训练过程患者需保持躯干直立、足背屈,避免膝过伸,减重从32%体质量水平开始,随着患者下肢功能恢复,步行功能改善,可酌情将减重调整至16%体质量水平以下,最终脱离减重状态。初始阶段下肢康复机器人每次训练时间为10min,以后随情况改善可酌情增加至每次15~20min,训练1次/d,6次/周,连续8周。训练过程中应注意患者的各项生命体征变化,如出现不良反应,则立即停止训练。
1.3 评定标准 根据Fugl-Meyer下肢运动功能评定量表[2]对下肢反射活动、关节活动及协调能力和速度进行评分,评分标准:(1)0~34分:分数越高,运动功能越好;(2)0~14分:分数越高,平衡能力越强。根据Holden步行功能分级对患者进行评定,将患者步行时需要帮助的大小,分为0~5级,分别计为0~5分,分值越高,步行能力越好。
1.4 统计学方法 采用SPSS 20.0软件进行统计学分析,计量资料进行正态分布检验,符合正态分布的以均数±标准差(±s)表示,采用t检验;计数资料采用χ2检验。P<0.05为差异有统计学意义。
2 结果
训练8周后,2组患者偏瘫下肢的Fugl-Meyer运动、平衡功能评分以及Holden步行功能分级、下肢神经传导速度及运动力指数(MI)均较治疗前明显提高;且实验组各项指标评分明显高于对照组,差异均有统计学意义(P<0.05)。见表1、2。
表1 2组治疗前后Fugl-Meyer运动及平衡功能评分、Holden步行能力分级评分比较 (±s)
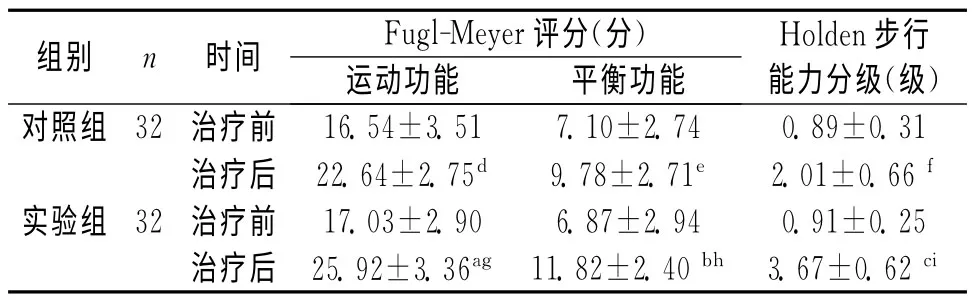
表1 2组治疗前后Fugl-Meyer运动及平衡功能评分、Holden步行能力分级评分比较 (±s)
注:与治疗前比较,at=11.33,bt=7.38,ct=23.35,dt=7.739,et=3.93,ft=8.69,P<0.05;与对照组比较,gt=4.27,ht=3.19,it=10.37,P<0.05
组别 n 时间 Fugl-Meyer评分(分)运动功能 平衡功能Holden步行能力分级(级)对照组32治疗前16.54±3.51 7.10±2.74 0.89±0.31治疗后 22.64±2.75d 9.78±2.71e 2.01±0.66 f实验组32治疗前 17.03±2.90 6.87±2.94 0.91±0.25治疗后25.92±3.36ag11.82 ±2.40 bh3.67 ±0.62 ci
表2 2组治疗前后下肢神经传导速度比较 (±s)
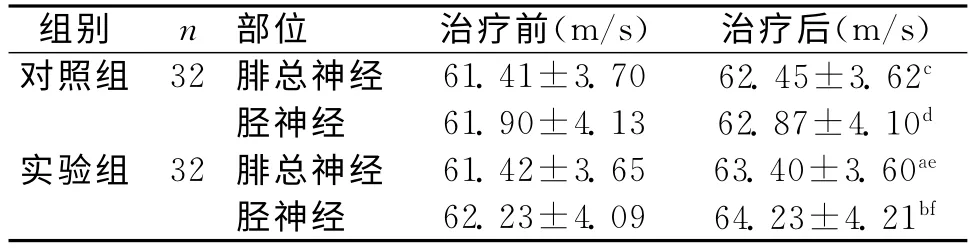
表2 2组治疗前后下肢神经传导速度比较 (±s)
注:与训练前比较,at=2.18,bt=1.93,ct=1.14,dt=0.94,P<0.05;与对照组比较,et=1.05,ft=1.30,P<0.05
组别 n 部位 治疗前(m/s) 治疗后(m/s)对照组32腓总神经 61.41±3.70 62.45±3.62 c胫神经 61.90±4.13 62.87±4.10d实验组32腓总神经 61.42±3.65 63.40±3.60ae胫神经 62.23±4.09 64.23±4.21 bf
3 讨论
随着我国逐渐进入人口老龄化社会,脑卒中已成为我国常见、多发病之一。脑卒中患者发病后最常见的功能障碍是肢体功能障碍[3]。脑卒中的病理生理机制是由于上运动神经受损,导致低位神经中枢释放运动反射,引起运动模式反常,使肢体肌张力增高,肌群间的协调出现联合反应和紧张性反射等脊髓水平的运动形式,导致肢体运动功能障碍[4]。在传统偏瘫下肢康复训练中,其康复效果与康复治疗师的工作经验和技术密切相关。在训练过程中患者容易跌倒,形成不对称步态,使正常的步态训练受到干扰,因此,患侧的肢体不能负重[5]。而使用脑卒中偏瘫患者康复治疗的传统器械进行康复训练时,大多数器械只适用于主动性训练且功能设计较单一,使这些器械的使用受到了很大的制约[6]。采用康复机器人辅助患者进行康复训练,能够进行并达到合理的肌肉激活、和谐的肌肉收缩时相、足够的承重能力和耐力的治疗目标,针对偏瘫肢体运动障碍的主要病因直接进行治疗[7]。康复机器人设置有减重功能,患者能在偏瘫早期即接受正常的步行模式,有助于患者尽早体验到正常步行的方式,从而能有效利用病情稳定后早期最有恢复潜能的时期进行功能恢复。
本研究结果表明,2组脑卒中偏瘫患者治疗后偏瘫下肢的Fugl-Meyer运动、平衡功能评分以及Holden步行功能分级、下肢神经传导速度及运动力指数(MI)指标均较治疗前显著改善(P<0.05),且实验组4项指标评分更高于对照组(P<0.05),与赵雅宁等[8]研究一致,说明常规康复训练对解决脑卒中偏瘫患者步行时患侧负重不足、平衡障碍、关节活动不协调等有具有良好疗效,而结合下肢康复机器人康复训练的效果更明显,且治疗过程中下肢康复机器人能对患者进行直接结果反馈,增强患者治疗积极性,对患者下肢功能的恢复有很大帮助。
综上所述,下肢康复机器人辅助治疗对于脑卒中偏瘫患者的下肢功能恢复有显著效用,解决了传统治疗方法中患侧负重不足等弊端,能够帮助患者及时有效地恢复正常的步行姿态,值得临床推广使用。
[1]全国第四届脑血管病学术会议.各类脑血管疾病诊断要点[J].中华神经科杂志,1996,29(6):379-380.
[2]杨述呜,张晓平,王守峰,等.早期心理干预联合康复训练治疗急性脑卒中后抑郁症的疗效观察[J].中华物理医学与康复杂志,2011,33(4):307-309.
[3]徐芝灵,李家亮.心理于预联合电针及高压氧治疗脑外伤后抑郁症的疗效观察[J].中华物理医学与康复杂志,2011,33(1):39-42.
[4]喻锦成,符俏.减重步行训练在脑卒中康复中的应用进展[J].海南医学,2010,21(1):26-29.
[5]Burgar CG,Lum PS,Scremin AM,et al.Robot-assisted upper-limb therapy in acute rehabilitation setting following stroke:Department of Veterans Affairs multisite clinical trial[6].J Rehabil Res Dev,2011,48(4):445-458.
[6]秦晓勇.康复器械在偏瘫患者肢体功能恢复中的应用[J].中国组织工程研究与临床康复,2011,15(48):9 088-9 092.
[7]杨杰华,张盘德,周惠嫦,等.视觉反馈等速肌力训练在偏瘫患者下肢运动功能康复中的应用[J],中国康复医学杂志,2009,24(11):1 012-1 014.
[8]赵雅宁,马素慧,李建民,等.步态训练机器人对脑卒中偏瘫患者步行功能的影响[J].中国康复理论与实践杂志,2013,19(1):1 006-1 008.
猜你喜欢
数学大王·中高年级(2022年5期)2022-05-22
健康体检与管理(2022年4期)2022-05-13
昆明医科大学学报(2022年3期)2022-04-19
中国听力语言康复科学杂志(2021年6期)2021-12-21
今日农业(2021年4期)2021-06-09
装备制造技术(2020年11期)2021-01-26
医学概论(2021年19期)2021-01-21
中华养生保健(2020年2期)2020-11-16
制造业自动化(2017年2期)2017-03-20
中国康复(2015年4期)2015-04-10
