
光纤定位单元的微型步进电机速度控制优化
2015-12-18 03:48:07刘永梅刘志刚
机械与电子 2015年6期
关键词:步进电机
刘永梅,刘志刚
(中国科学技术大学精密机械与精密仪器系,安徽 合肥 230027)
Optimization of Speed Control of Micro-stepping Motor for Fiber Positioning Unit
LIU Yongmei,LIU Zhigang
(Department of Precision Machinery and Precision Instrumentation,University of Science and Technology
of China,Hefei 230027,China)
光纤定位单元的微型步进电机速度控制优化
刘永梅,刘志刚
(中国科学技术大学精密机械与精密仪器系,安徽 合肥 230027)
OptimizationofSpeedControlofMicro-steppingMotorforFiberPositioningUnit
LIUYongmei,LIUZhigang
(DepartmentofPrecisionMachineryandPrecisionInstrumentation,UniversityofScienceandTechnology
ofChina,Hefei230027,China)
摘要:步进电机速度控制S曲线随电机型号及外力负载不同而改变。在获取光纤定位单元所用步进电机速度控制S曲线时,对传统S曲线生成方法进行优化和改进,采用三次方程的S曲线。通过对光纤定位单元进行走位实验,对比发现定位精度有了明显提高。该方法不仅能够很容易获取不同步进电机在加减速控制中的S曲线,而且在S曲线等脉冲离散过程中,可以跳过共振带而获得最佳曲线离散频率组,适用性好。
关键词:步进电机;S曲线;速度控制优化
0 引言
自1998年发现宇宙的加速膨胀以来,大量的天文观测显示宇宙中存在压强为负的暗能量成分。暗能量[1]已经成为目前宇宙学和理论物理的最重要的研究课题之一。美国主导的地基项目BigBOSS,计划改造现有的4m口径望远镜,实现一个大型光谱巡天。在观测时间上,BigBOSS项目的开展时间正处在我国的LAMOST项目和南极光学望远镜即第五代天文望远镜计划的过渡期,使得LAMOST光纤定位单元定位系统应用其中。
BigBOSS项目中在焦面板上放置5 000根光纤定位单元,体积要求小。而现有LAMOST项目中的单元重量和体积大,将其应用于BigBOSS项目中需要在LAMOST单元的基础上进行改进,使单元更小,同时微型步进电机也要求更小。因此,原步进电机速度控制频率将不再适用,应予以改进。
步进电机在加减速过程中脉冲频率变化不合理会使步进电机失步或者过冲,从而使系统无法精确定位。同时,由于系统快速性的要求,电机需要快速响应以完成加减速过程,因此找到最佳脉冲输出方案对达到实际应用要求至关重要。目前,国内外步进电机控制曲线主要包括:梯型曲线、指数型曲线及S型曲线。其中,最常用的是S曲线[2],与梯型及指数型曲线相比,S曲线平滑性好,它不是一种固定算法,S曲线一般有抛物线型、三角函数型[3]、5段式方程组拼接和7段式方程组拼接等。而抛物线型在启动频率阶段加速度有突变;虽然三角函数型的加加速曲线连续,但是计算量大,实现较复杂;分段式S曲线一般采用多个方程首尾拼接过渡成S曲线,这样在修改曲线时会比较麻烦,且加加速曲线不连续。
1 步进电机速度曲线实现过程
为了使步进电机满足不同性质、不同程度的工作要求,同时能够更方便快速地获得最佳的加减速曲线,提出了采用一个三次方程生成S曲线的方法。该方法与七段三次样条函数曲线思想一致[4],但实际过程中却只用三段三次样条函数即可满足条件,且计算量小,方程式简单。同时,虽然对处于负载状态下的步进电机执行加减速控制实验,可以按预期的目标升降速,但是会出现过冲量大、稳定性差、噪音大的现象。因此,找到最佳加减频率之前,需进行多次实验,而该三次方程S曲线方法仅需修改几个参数即可获得结果。
1.1三次方程曲线构造
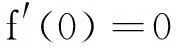
步进电机加减速控制的S曲线,均采用一个三次方程曲线来实现。以加速过程曲线为例,如图1所示,设时间变量为t,频率(速率)[5]随时间的变化关系为f(t),则有:
(1)
式(1)对时间求导可得加速度方程:
(2)
式(1)对时间进行二次求导可得加加速度方程:

(3)
若给定启动频率f0(等于V0),稳定频率fmax(等于Vmax)以及加速时间T,则有:
(4)
(5)
对于起始加速度大小可依情况而定,在此过程中为了防止启动突变带来的不稳定,设为0,则有:
(6)

(7)
由式(4)~式(7)可求得未知数a,b,c,d 的值。
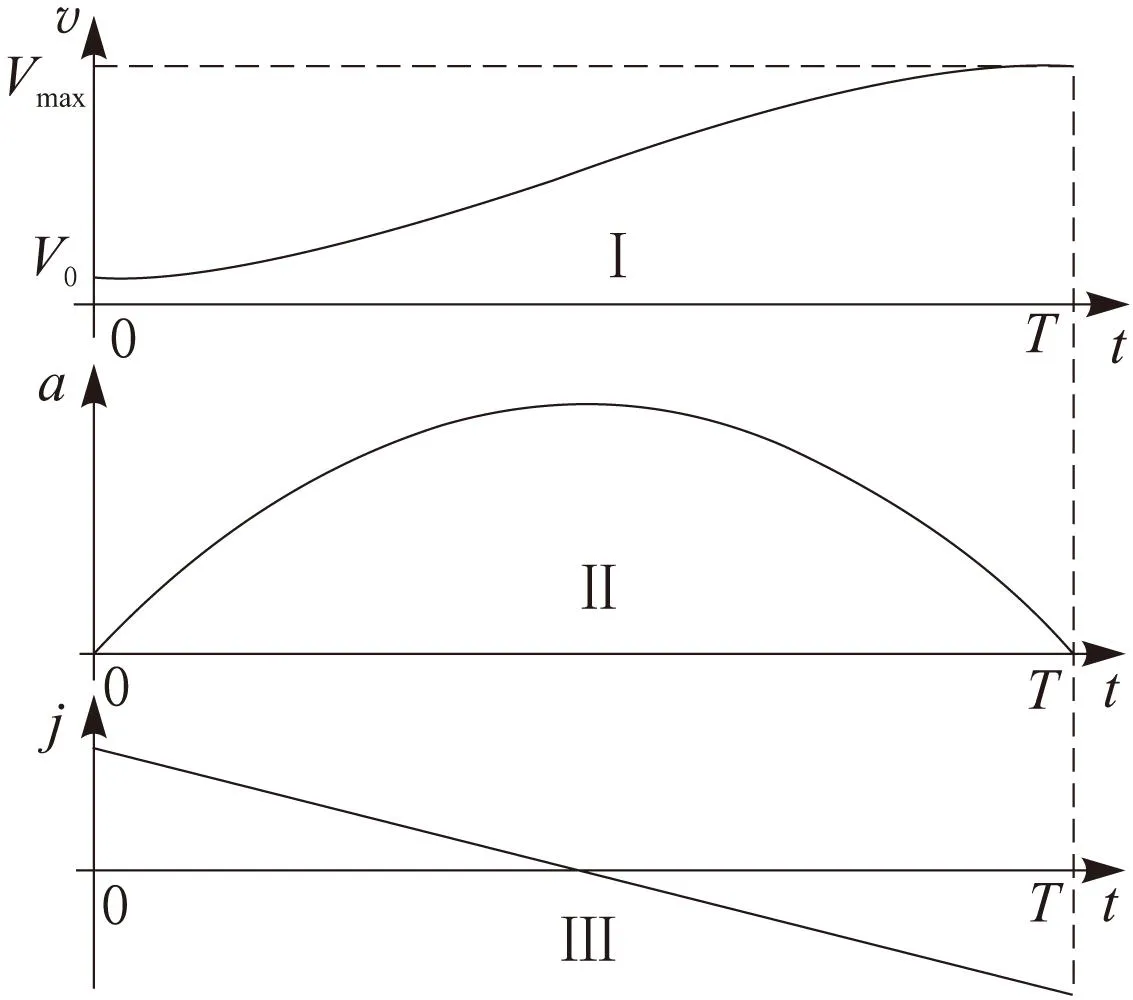
图1 速度、加速度、加加速度关系
综上可知,所构造的三次方程曲线同样满足三角函数曲线特有的几个基本条件:
a.速度变化曲线变化平稳,不存在速度突变冲击。
b.加速度变化曲线连续。
c.加加速度变化曲线连续。
d.速度曲线加速变化段的起始和终止、匀速整段、减速变化段的起始和终止加速度均为0,并满足边界速度要求。
1.2S曲线离散化
步进电机加减速S曲线需要离散化,一般采用2种方式,即等时间间隔离散和等脉冲间隔离散。前者程序设计虽然比较简单,但是考虑到步进电机的动态特性,在进行控制时会使两阶梯间的突跳频率太大而导致丢步或失步,且快速性也差。因此,采用等脉冲间隔对曲线进行离散[6],对式(1)进行积分可得到加速过程中脉冲随时间变化的曲线方程为:
(8)
由N(0)=0,可得e为0,又因a,b,c,d的值在1.1节已求得,所以通过式(8)可求得在T时间内总脉冲数P。利用等脉冲间隔进行离散,给定每个频率阶梯的脉冲数δp,求出在加速段总的频率阶梯数N=P/δp。式(9)为超越方程,可采用牛顿迭代法来求解出第n个脉冲的时刻,用公式表示为:
(9)

用Matlab编写程序将式(9)迭代若干次,就能够求出足够精确的t(n),然后将其代入式(1),便可求出每个n所对应的频率f(n),用定时器的时钟频率除以f(n),可求出对应的定时器计数值(定时器的装载值)。具体过程如图2所示。
减速阶段可以认为是加速阶段的逆过程,加速阶段的曲线方程同样适用于减速阶段且两者离散实现过程基本一致,不同点在于减速阶段起始频率换作停止频率,同时减速过程频率的加载顺序与加速阶段相反[7]。
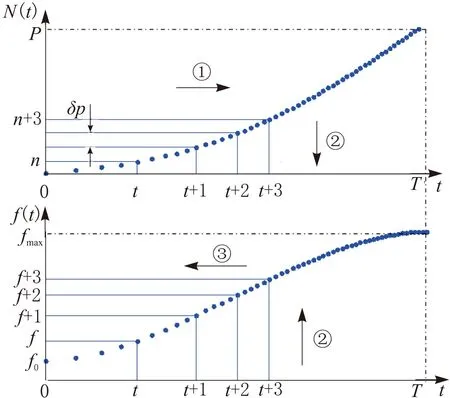
图2 等脉冲法离散过程
综合整个过程发现,针对不同情况时只需修改几个边界值(启动频率、稳定频率和加速时间),便可获得相应曲线。在离散过程中可以通过重新定义δp值来控制频率组的个数,同时还可以调整δp的值,尽可能越过步进电机共振频率带。最后,反复试验得到一个最优结果。
2 实验结果与分析
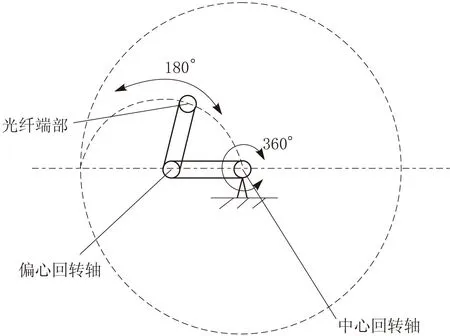
图3 双回转机构示意
将LAMOST项目的焦面板光纤定位系统,应用于BigBOSS项目的焦面板光纤定位系统中,两者单元结构原理一样,但后者尺寸更小,数量更多。在LAMOST光纤定位系统中,采用并行可控式光纤定位方案[8],该系统将焦面按蜂窝状分为4 000个区域,各区域之间有一定重叠,每一区域安装1个光纤定位单元,从而实现光纤端部的快速精确定位。定位机构通过双回转机构的中心回转和偏心回转来实现,双回转机构的中心回转轴和偏心回转轴分别在驱动装置(由步进电机、蜗轮蜗杆减速机构组成)的驱动下实现转动。中心回转轴可在±180°范围内转动,偏心回转轴可在±90°范围内转动,可保证双回转定位机构在整个圆区域内实现定位,如图3所示。为了保证光纤运动的位置精度,步进电机不能出现丢步现象,且要进行快速定位,因此需要找出电机的最佳工作频率。
系统涉及了3种微型步进电机,均为FAULHABER公司所生产的两相步进电机。3种电机的电气指标如表1所示(每转20步,电压模式控制)。
表1步进电机的电气指标

参 数AM1020AM0820ADM0620标称电压(DC)/V1256步进角(全步)/(°)181818共振频率(无负载)/Hz140170170半径/mm1086保持转矩(额定电流在两阶段)/mN·m1.60.650.2
本实验采用CCD相机对光纤定位单元的走位精度进行测试,即重复精度测试。LAMOST光纤定位单元的中心轴和偏心轴均采用AM1020电机进行驱动,该微型步进电机加减速S曲线采用7分段式,等时间间隔离散。控制过程中采用定时器来实现电机的加减速,即通过MC13213的寄存器Control_CRegister9,Bits2-0将定时器的时钟频率设为1MHz,在程序里定义一个数组(定时器装载值),共128步,开始时设置定时器的计数值为20 000,对应的电机运转频率为启动频率50Hz,稳定频率为600Hz。BigBOSS光纤定位单元的中心轴和偏心轴分别采用AM0820、ADM0620来进行驱动,此时,电机的各种参数以及负载的大小与采用AM1020时不同,原有的定时器装载值不再适用,需进行优化。
下面以偏心轴电机ADM0620为例进行实验分析。结合图3和图4所示,偏心轴绕偏心回转轴旋转180°需11 000个脉冲,由计算机发送指令,控制驱动板驱动电机运转。实验中,先使偏心轴由零位开始运转1 000个脉冲,以此位置作为起点进行实验,分5步前进,每步前进2 000个脉冲,然后返回2 000×5个脉冲回到起点,依此重复20轮。每步运转完停留短暂时间,用2kCCD相机拍摄图片并计算出光纤的位置坐标。实验中共2个单元,每个单元有6个位置。每个位置有20个坐标点(理想情况下,这20个坐标点应该完全重合),最后计算出这些点的离散程度。
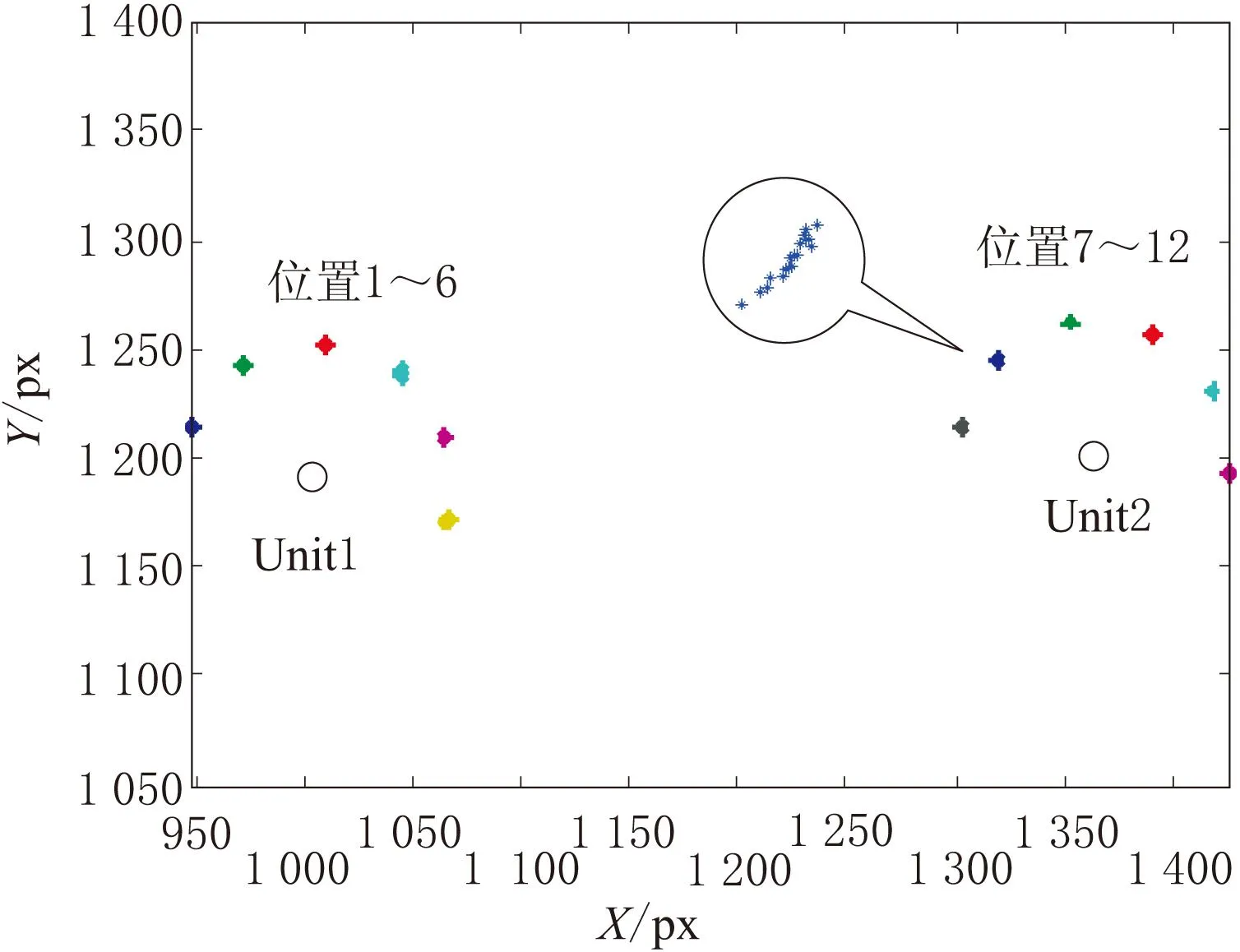
图4 光纤位置坐标(像素px)
对比a,b,c情况下得到的频率值,来反映光纤定位单元的走位重复精度。a,b,c情况为:
a.原LAMOST步进电机所用频率组。
b.优化后的S曲线生成的频率组。
c.在b的基础上,剔除频率在ADM0620型步进电机共振频率值倍数附近的值而得到的频率组。
在图5~图7中,横坐标代表光纤位置序号,纵坐标为每个位置20个坐标点与均值坐标点(该位置20个坐标点的平均值)之间的距离大小Δd,图中1px≈90μm。
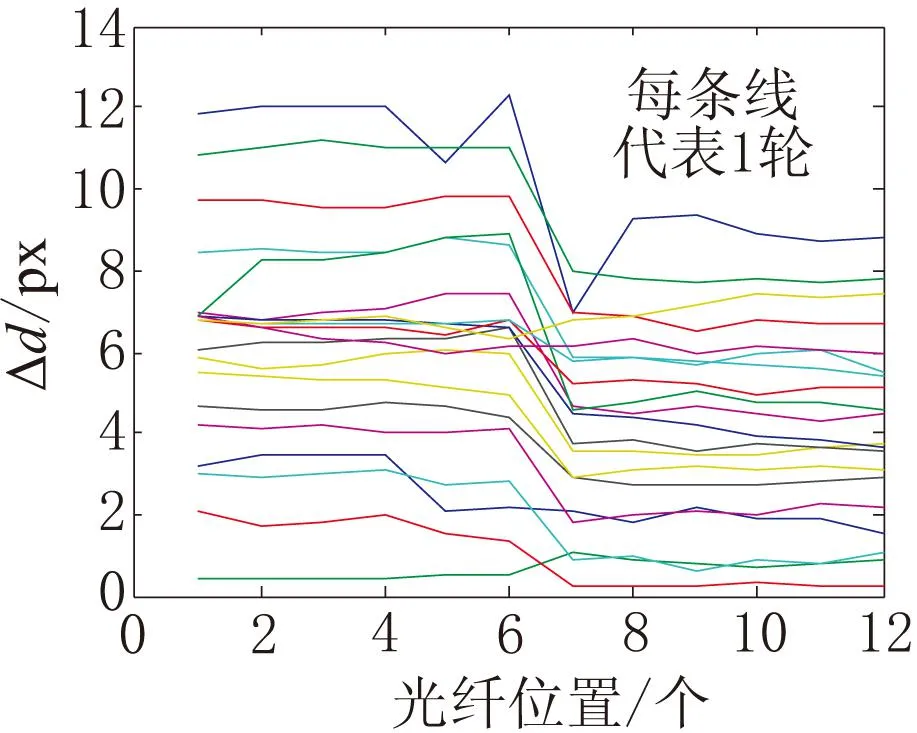
图5 a情况下的离散程度
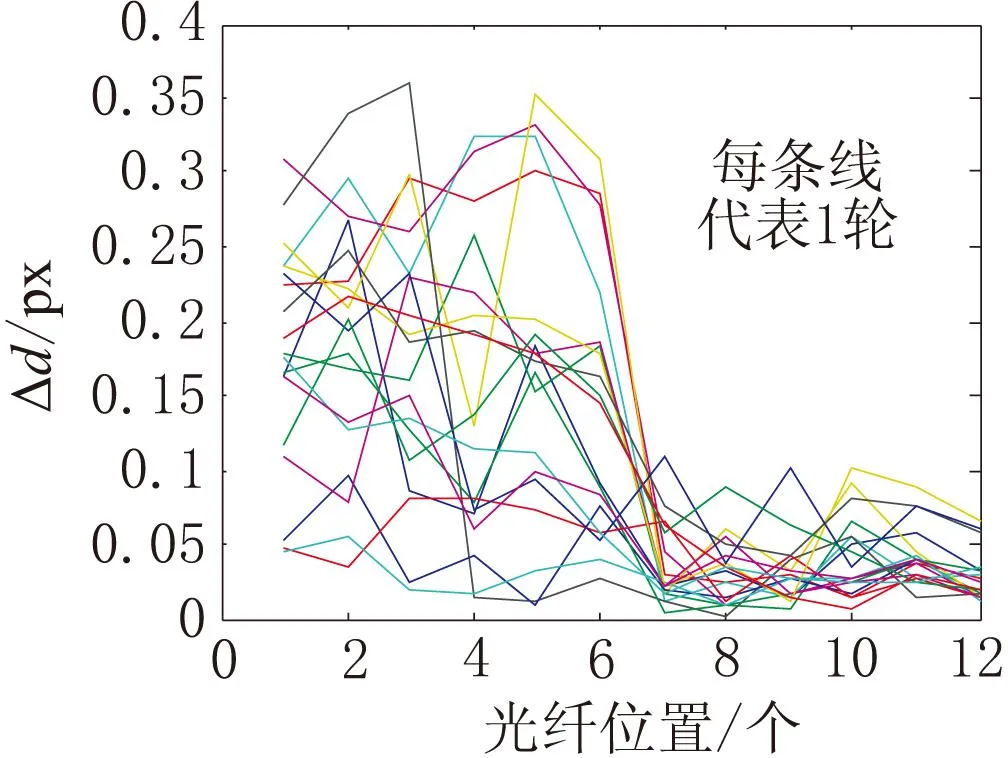
图6 b情况下的离散程度

图7 c情况下的离散程度
由以上实验结果可知:
a.对于不同的电机,其转矩随频率变化的关系不同,转矩大小也不同,要根据实际情况设计相对应的S曲线,优化后的S曲线其离散程度更小,定位精度明显提高。
b.在负载小的情况下,共振频率对定位精度有很大的影响,会带来很大的噪声,在曲线离散时需要跳跃电机共振带,避免与整机发生共振,使步进电机发挥最大优势。
3 结束语
步进电机加减速控制技术是一项关键技术,只有在实际应用中不断积累经验、以理论为指导不断探索,才能逐步达到最佳的控制状态。本研究在S曲线传统模型的基础上进行了优化设计,提出了采用三次方程S曲线的方法,对步进电机的加速度和速度进行控制。在考虑被控对象的约束条件不同时,该方法能够灵活设置初始参数,得到最优曲线和无共振现象发生的频率组。
参考文献:
[1]蔡荣根,詹虎.暗能量:观测证据和理论研究[J].物理,2011,40(1):18-22.
[2]曹东杰,韩峰,任云燕.单片机控制步进电机按S形曲线升降频设计[J].弹箭与制导学报,2006,26(2):157-159.
[3]崔洁,杨凯,肖雅静,等.步进电机加减速曲线的算法研究[J]. 电子工业专用设备,2013(8):45-49.
[4]RouChiwei,ShihCL,LeeWY.PlanningS-curvesinthecoordinatedPTPmotionofmultiple-axismachinesundervelocityaccelerationandjerkconstrains[J].JournaloftheChineseInstituteofElectricalEngineering,2003,10(3):221-234.
[5]王鉴光.电机控制系统[M].北京:机械工业出版社,1994.
[6]王太勇,赵巍,李宏伟,等.基于最小偏差法的步进电机速度控制方法研究[J].机械科学与技术,2005,24(6):699-701.
[7]简毅,刘宝.基于AT91SAM9261的步进电机S曲线加减速控制研究与实现[J].轻工机械,2012(3):62-66.
[8]李为民,胡红专,俞巧云,等.LAMOST并行可控式光纤定位系统定位单元及其控制技术研究[J].仪表技术与传感器,2000(4):33-38.
Abstract:The stepper motor’s S-curve varies with types of stepper motors and mechanical loads. In the process of acquiring a stepper motor’s S-curve for a fiber positioning unit, this paper optimizes and improves the traditional method of obtaining S-curve and uses the S-curve with cubic equations.The accuracy of positioning of fiber unit was clearly improved as a result of a positioning experiment on a fiber positioning unit. The results show that, this method not only can make it easier to obtain different stepper motor’s S-curve in the acceleration and deceleration control, but also can get the best curve discrete frequency groups and skip the resonance band in the process of pulse discretization.Thus, this paper concludes that the method can be applied in a wide number of contexts.
Key words:stepper motor;S-curve;optimization of speed control
作者简介:刘永梅(1987-),女,安徽亳州人,硕士研究生,研究方向为精密机械与智能信息处理;刘志刚(1971-),男,山东濉坊人,副教授,高级工程师,主要研究方向为测控技术与智能信息处理,通信作者。
基金项目:国家基金委国际合作与交流项目(11320101002)
收稿日期:2015-02-05
文章编号:1001-2257(2015)06-0034-04
文献标识码:A
中图分类号:TM383.6
猜你喜欢
山东工业技术(2016年24期)2017-01-12 09:31:47
科学家(2016年3期)2016-12-30 00:32:48
电子技术与软件工程(2016年22期)2016-12-26 12:46:20
电子技术与软件工程(2016年19期)2016-12-19 18:27:00
科技视界(2016年24期)2016-10-11 12:44:53
科技视界(2016年15期)2016-06-30 16:31:32
电脑知识与技术(2016年12期)2016-06-14 01:40:14
电脑知识与技术(2016年7期)2016-05-19 13:39:34
科技视界(2016年7期)2016-04-01 11:38:06
教育教学论坛(2015年51期)2015-12-15 10:08:29
