弱光环境下基于单目视觉的无人系统自主障碍探测方法
2015-12-18 01:16于阳阳李伟民
机械与电子 2015年6期
于阳阳,陈 妍,李伟民
(1.贵州民族大学理学院,贵州 贵阳 550025;2.贵州民族大学传媒学院,贵州 贵阳 550025)
A Monocular Vision Obstacle Detection Method in Low Light Environments for Unmanned Systems
YU Yangyang1,CHEN Yan2,LI Weimin1
(1.Polytechnic College,Guizhou Minzu University,Guiyang 550025,China;
2.College of Broadcasting Media,Guizhou Minzu University,Guiyang 550025,China)
弱光环境下基于单目视觉的无人系统自主障碍探测方法
于阳阳1,陈妍2,李伟民1
(1.贵州民族大学理学院,贵州 贵阳 550025;2.贵州民族大学传媒学院,贵州 贵阳 550025)
AMonocularVisionObstacleDetectionMethodinLowLightEnvironmentsforUnmannedSystems
YUYangyang1,CHEN Yan2,LI Weimin1
(1.PolytechnicCollege,GuizhouMinzuUniversity,Guiyang550025,China;
2.CollegeofBroadcastingMedia,GuizhouMinzuUniversity,Guiyang550025,China)
摘要:提出了一种无人系统自主障碍探测方法,该方法借助单目视觉系统感知环境信息,采用模糊方法对视觉图像信息进行增强,通过检测障碍物边缘,实现对弱光环境中障碍的探测。最后,通过对比实验可知,该方法可以有效地识别出无人系统前方的障碍物,为无人系统的自主障碍回避提供依据。
关键词:无人系统;弱光增强;障碍探测
0 引言
近年来,无人系统在航空、航海及工业、农业等领域得到广泛应用[1]。由于无人系统工作的环境通常是危险的或遥远的环境,操作或控制人员不便到达或不可能到达,所以无人系统应具有良好的自主能力,其中良好的避障能力是实现无人系统自主运动的关键之一。目前,针对无人系统如何更准确、更快速的躲避障碍,相关人员已做了大量的研究,如:采用启发式动态规划算法,解决无人系统寻路、避障问题的方案[2];采用多传感器信息融合的方法,通过多个超声传感器对障碍物信息进行采集,然后利用模糊推理的方法实现无人系统的避障控制[3]等。众多探测方法中,基于视觉的探测由于其前瞻性好,且能包含优于距离类传感器的大量环境信息,因而,基于视觉的探测得到广泛关注。其中,张跃东等人研究了一种基于单目视觉的障碍物深度提取算法,根据图像序列中特征点间距离的变化和无人机的运动计算障碍物的深度[4];杨唐文等人利用道路上的颜色信息以实现复杂环境下的道路避障功能[5];对于动态目标识别,邱雪娜等人提出了采用目标特征和视差进行目标匹配,通过区域增长方法进行目标区域的提取,结合视觉标定的模型对目标进行定位的方法[6]。但是,这些研究是在光线充足的环境中实现的,现实中,无人系统常需要在如室内或树林等环境里开展救援或侦查任务,在这类环境中,通常由于遮挡造成视觉系统进光量不足,这会对基于视觉探测的无人系统的障碍识别能力带来较大影响。
因此,针对无人系统面临的弱光环境中的自主障碍探测问题,提出了一种基于单目视觉的无人系统障碍检测方法,该方法使用安装在无人系统头部的单目视觉系统所采集到的环境信息进行分析,在传统的Canny算法基础上,利用模糊方法对环境图像信息进行增强,并对障碍物边缘进行识别,根据识别出的边缘信息提取出环境中障碍物的轮廓,从而实现对弱光环境中障碍的探测。
1 自主障碍探测方法
将单目视觉系统所采集到的环境信息进行分析后,提取出障碍物的边缘信息。由于受各种拍摄条件的限制,视觉系统所采集到的障碍物图像信息会出现对比度较差或是图像模糊的情况。因此,首先对障碍物图像信息进行模糊增强处理,它不但可以改善图像模糊不清甚至失真的现象,而且可以抑制障碍物图像的某些特征而使另一些特征得到增强。其次,对经过增强处理后的障碍物图像信息进行滤波处理,在非线性平滑滤波中,中值滤波可以在不减小图像对比度的情况下减小异常值的影响,能较好地保留障碍物的边缘细节,同时克服线性滤波所带来的图像细节模糊问题[7]。然后,通过Canny算法检测出障碍物的边缘信息,Canny算法在传统的边缘检测算法中表现突出,在边缘提取中取得了良好的效果[8]。最后,根据检测到的边缘信息提取出障碍物的轮廓。自主障碍探测方法流程如图1所示。

图1 自主障碍探测方法流程
1.1图像模糊增强算法
图像增强是在边缘检测中按特定的需求尽可能突现图像中的某些信息,同时削弱或去除某些不需要的信息,从而提高图像的质量。假设某一幅m×n个像素的L级灰度图像其矩阵表达式为X,对图像进行模糊化之后得到其模糊矩阵U:
(1)
μmn表示点(m,n)处的灰度级xmn相对于某一个特定灰度级的隶属度,μmn∈[0,1]。
模糊边缘检测方法中给出了隶属函数的表达式为:
(2)

(3)
由式(3)可以看出,对图像进行模糊增强处理的主要方法是对低于0.5的像素点进行抑制,对高于0.5像素点的边缘信息进行增强,即增强边缘信息,抑制非边缘信息。然后,根据式(4)得出迭代后的模糊增强矩阵。
(4)

(5)
1.2基于模糊增强的Canny边缘检测算法
本算法的基本思想是,采用高斯函数对图像进行卷积运算得出其梯度的幅值和方向,然后在图像中找出具有局部最大梯度幅值的像素点,而且经过模糊增强之后,图像边缘两侧的对比度会明显增强,降低了边缘的模糊性。
a.通过高斯滤波去除图像噪声,对图像进行平滑处理。一般选择方差为1.4的高斯函数模板和图像进行卷积运算[9]。将模糊增强代替高斯平滑,利用式(1)将灰度空间图像转换到模糊空间,在模糊空间中使用式(3)对图像做增强处理,得到模糊增强后的图像矩阵,最后根据式(5)的逆变换得到模糊增强后的图像。
b.计算梯度的幅值和方向,通常采取一阶偏导数的有限差分,分别计算出x和y方向的偏导数、方向角以及梯度幅值。选用 2×2 一阶有限差分近似数据矩阵的梯度:
(6)
数据矩阵在x与y方向上的偏导矩阵为:
(7)
图像中任一像素点的梯度幅值和方向角为:
(8)
c.非极大值抑制。幅值越大必然导致其对应的图像梯度值越大,但由于伪边缘点的存在不足以确定边缘,要确定边缘需对图像进行细化,为此,选用大小为3×3,含8方向的邻域对图像中所有像素点沿梯度方向进行插值。如果邻域中心点的梯度值比沿梯度方向上的2个插值结果小,则认为该点不是边缘,反之则标记为候选边缘点,这样就得到了候选边缘图像[10]。
d.双阈值检测。对经过非极大值抑制的梯度直方图分别确定2个高(TH)、低(TL)阈值,若图像中任一像素点(i,j)的梯度幅值高于高阈值TH,则认为该点一定是边缘点,若像素点(i,j)的梯度幅值低于低阈值TL,则认为该点一定不是边缘点,而对于梯度幅值处于2个阈值之间的像素点,则可看成是可疑边缘点。此时需根据边缘的连续性对其进一步判断,若该像素点的邻接像素中有边缘点,则认为该点也为边缘点,否则认为该点为非边缘点[11]。
1.3障碍物轮廓提取
利用Canny算法提取出的障碍物边缘信息,是分布在图像区域中一系列的离散点,为了得到更准确的图像边缘轮廓信息,需要对边缘进行跟踪处理。在经Canny算法进行边缘提取之后的图像信息为0,1矩阵。假设1为边缘点,0为非边缘点,用矩阵E[i,j]保存障碍物的边缘信息点。先确定障碍物边缘的起始点,一般情况下采取边缘点为1的最小行、最小列的边缘点为起始点,然后找出本行中为1的最大列的边缘点,按照此方法分别找出最小列中最大行为1的边缘点以及最大列最大行为1的边缘点,由此得出的矩形区域即可确定为障碍物的边缘信息。
2 仿真结果与分析
2.1视觉系统
将视觉系统应用于四旋翼无人系统中,通过分析单目视觉系统采集的信息来感知外部环境。由于飞行系统的有效载荷质量约束,因此传感器和主控芯片的选择,需要综合考虑尺寸、功耗、外设资源和计算能力。四旋翼无人系统硬件方面,选用F450型机架以及2212型无刷直流电机,搭载APM开源飞行控制器、电子调速器以及数据链模块,并选用8寸通用螺旋桨,在此基础上,单目视觉系统选用SONY公司1/3 960H CCD传感器模块,其分辨率达800 TVL,搭配SONY公司Effio处理芯片,装配3.6 mm镜头,其监控角度可达70°。
2.2边缘检测基准实验

图2 人像边缘检测结果
在Matlab7.0环境下,以任意一张细节边缘比较复杂,边缘类型比较多的图像作为试验对象,可得边缘检测结果如图2所示。从图2c中可以看出,图像中的一些简单线条及大概轮廓已经表现出来,但是对一些细节线条,如头发、锁骨及手指部分的边缘提取效果较差,并且包含一些伪边缘,而图2d运用本文提出的边缘检测方法,则能较完整的提取出整个边缘信息,并且在检测结果中消除了伪边缘,细节和轮廓都比较完整。
图3的枫叶图其边缘信息较上图少很多。图3c已大致检测出枫叶的边缘轮廓,但图像后面的虚影部分没有被检测出来,而且叶脉部分提取效果较差,而图3d已检测出模糊虚影部分,并且已明显检测出叶脉部分。

图3 枫叶边缘检测结果
2.3弱光环境下自主障碍检测实验
相同场景下不同光照强度通过摄像头采集到的图像如图4和图5所示,分别采用传统Canny算法和本文所提出的基于模糊增强的图像边缘检测算法,对障碍物进行边缘提取,分析不同光照强度对本算法的影响。
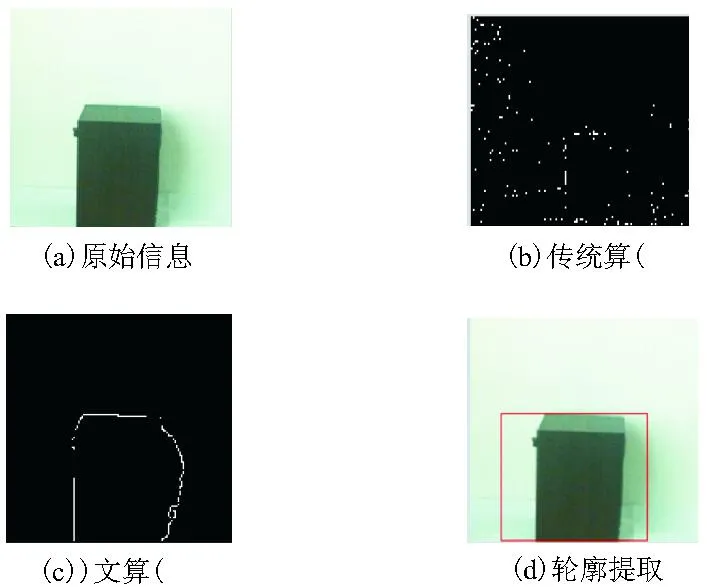
图4 正常光照下障碍探测实验

图5 弱光环境中障碍探测实验
图4为正常光照下的实验结果,可以看出,图4b中的边缘点杂乱无章,辨别不出障碍物的位置,而图4c已经大概提取出了障碍物的边缘信息。图5为弱光条件下的实验结果,可以看出,使用传统的Canny算法在弱光环境下提取出的障碍物边缘更加模糊,基本分辨不出其轮廓,而使用本文所提出的方法可很清晰地看出其轮廓形状。在图4d和图5d中,矩形方框区域即可视为障碍物区域。
3 结束语
设计了一种适用于弱光环境中的无人系统自主障碍探测方法,采用单目视觉系统作为感知装置,在传统边缘检测算法基础上,进行模糊增强,最终提取出环境中障碍的轮廓。通过对比可知,该方法能够一定程度上抑制噪声对障碍边缘的影响,在弱光环境下能较好地分辨出障碍物,提高了障碍探测算法的弱光适应性。但是,该算法在某些相对复杂的环境中还有一定的局限性,需要进一步改进。
参考文献:
[1]王越超,刘金国.无人系统的自主性评价方法[J].科学通报,2012,57(15):1290-1299.
[2]方啸,郑德忠.移动机器人自主寻路避障启发式动态规划算法[J].农业机械学报,2014,45(7):47-54.
[3]陈绍茹,陈奕梅.基于多传感器信息融合的移动机器人避障[J].传感器与微系统,2014,33(5):35-38
[4]张跃东,李丽,刘晓波,等.基于单目视觉的无人机障碍探测算法研究[J].激光与红外,2009,39(6):673-676
[5]杨唐文,王敏杰,秦勇.融合图像边缘和区域特征的道路检测算法[J].东南大学学报:自然科学版,2013(7):81-84.
[6]邱雪娜,刘斐,刘士荣,等.基于双目视觉的移动机器人动态目标识别与定位[J].华东理工大学学报:自然科学版,2010,36(1):103-108.
[7]秦文学.用于边缘检测的图像增强技术研究[D].北京:北京工业大学,2008.
[8]雒涛,郑喜凤,丁铁夫.改进的自适应阈值Canny边缘检测[J].光电工程,2009,36(11):106-111.
[9]李俊山,马颖,赵方舟,等.改进的Canny图像边缘检测算法[J].光子学报,2011,40(增刊1):50-54.
[10]曾峥,李彦,储海平.一种改进的基于模糊增强的Canny边缘提取算法[J].科学技术与工程,2009,9 (18) :38-42.
[11]吕哲,王福利,常玉清.一种改进的Canny边缘检测算法[J].东北大学学报:自然科学版,2007,28(12) :81-84.
Abstract:An autonomous obstacle detection approach is presented to help capture environmental information for monocular vision system sensors. The approach uses fuzzy methods to enhance the collected image data and detects the edges of obstacles to detect obstacles in a low light environment. Results of the experiment demonstrate that the presented method can identify the obstacles located in front of Unmanned Systems. This method can be used as the basis of autonomous obstacle avoidance.
Key words:unmanned systems;low light enhancement;obstacle detection
作者简介:于阳阳(1987-),女,天津蓟县人,硕士,讲师,研究方向为计算机测控技术。
基金项目:贵州民族大学科研基金资助项目(校科研2013007)
收稿日期:2015-03-17
文章编号:1001-2257(2015)06-0077-04
文献标识码:A
中图分类号:TP391