
EKF神经网络算法在疏浚作业建模中的应用
2015-12-18 03:47:57李凯凯许焕敏
机械与电子 2015年6期
关键词:模型
李凯凯,许焕敏,周 丰
(河海大学机电工程学院,江苏 常州 213022)
Application of EKF Neural Network Algorithm in a Dredging Dynamic Model
LI Kaikai,XU Huanmin,ZHOU Feng
(College of Mechanical and Electrical Engineering,Hohai University,Changzhou 213022,China)
EKF神经网络算法在疏浚作业建模中的应用
李凯凯,许焕敏,周丰
(河海大学机电工程学院,江苏 常州 213022)
Application of EKF Neural Network Algorithm in a Dredging Dynamic Model
LI Kaikai,XU Huanmin,ZHOU Feng
(College of Mechanical and Electrical Engineering,Hohai University,Changzhou 213022,China)
摘要:提出了基于EKF神经网络的疏浚作业过程动态演化建模方法。在神经网络建模过程中引入卡尔曼滤波思想,利用扩展卡尔曼滤波实时更新神经网络模型的权重,从而获得能有效跟踪挖泥船疏浚过程工况变化的模型。
关键词:疏浚作业;扩展卡尔曼神经网络;能耗与产量;模型
0 引言
疏浚作业是一个非常复杂的生产过程,具有非线性、时滞性、多变量和变量间相互耦合等特性,以及环境等各种不确定性因素的影响,其模型往往难以建立。常规的数理模型只能定性地描述疏浚的生产过程,不能准确反映挖泥船的作业工艺,在对工艺模型相对要求高的场合并不适用。神经理论[1]中的Kolmogorov连续性定理表明,任一连续函数都可以精确地由一个3层神经网络来实现。任何一组时间序列都可以视为一个非线性机制确定的输入输出系统,因此,该理论从数学上保证了神经网络用于建立预测模型的可行性。
基于智能算法如神经网络、支持向量机等建立的模型,往往是假设其环境噪声和内部状态变量是相对稳定的,忽略了环境变量和内部状态变量对模型的影响,所用的智能方法仅仅只是对输入输出变量进行简单的静态映射,是一种静态建模方法,其效果仅限于相对稳定的过程模型。而疏浚过程是一个动态演化的过程,其输出除了与输入变量有关外,还受环境噪声和内部状态变量影响,工况模型会随着时间的变化而变化。为此,采用非线性动态跟踪特性的扩展卡尔曼算法[2-4](EKF),结合对非线性有良好拟合特性的神经网络算法,来建立疏浚作业模型,通过对系统状态的不断跟踪、进化,最终得到一个能实时与最新工况相吻合的疏浚作业过程动态演化模型。以“天狮号”绞吸式挖泥船在曹妃甸实际施工反馈的数据为例,分别采用BP训练算法和EKF训练算法对神经网络进行训练,预测结果表明了EKF算法的有效性和准确性。
1 扩展卡尔曼滤波算法(EFK)
扩展卡尔曼滤波是一种最有估计,它采用状态方程和观测方程组成的非线性随机系统的状态空间模型来描述滤波器,是解决非线性滤波问题常用的一种有效方法。它采用状态方程的递推性,按线性无偏最小均方差估计准则,采用递推算法对滤波器的状态变量作最佳估计,从而求得滤掉噪声的有用信号的最佳估计。对如下的随机离散非线性系统:
(1)
Xk和Zk分别为系统的状态变量和观测变量;函数f(x)和函数h(x)分别为非线性系统的状态方程和观测方程;Wk与Vk是相互独立的并且均值为0的高斯白噪声向量。其统计特征为:
Qk与Vk分别为系统过程噪声协方差矩阵和观测噪声协方差矩阵。
(2)

2 EKF神经网络疏浚作业模型训练算法
绞吸式挖泥船效率较高,广泛应用于港口开发、航道清淤、沿海建设和吹填造地等重大工程。绞吸式挖泥船主要由绞刀系统、泥泵系统和管路系统组成。疏浚过程工艺参数较多,并受天气、土质和设备老化等不确定因素影响。若采用所有变量来建立疏浚过程的非线性模型,建模条件苛刻、难度大,模型精度难以保证。通过综合分析疏浚工艺[5-8]发现,可以把绞刀转速、横移速度、绞刀前进距离和绞刀切泥厚度作为调节绞刀系统的主要决策变量,泥泵的效率作为评价泥泵系统的综合指标,管路流速、管路平均浓度作为管路系统的主要参量。其次,研究还发现台车行程是否合理也是影响挖泥船能耗和生产产量的关键因素。因此,可将上述8个变量作为输入变量,以能耗和产量2个指标作为输出,根据经验取隐含层节点数为12,建立基于EKFNN的疏浚动态演化模型。


其维数为Nk=8×12+12×2=120,即120个权值,则系统的状态方程和观测方程可表示为:
(3)
Yd为期望输出;Xk为输入矢量;Y为实际输出。观测噪声Vk是随机白噪声,其统计特性为:
将期望值展开为泰勒级数并略去二次以上项得:
(4)
Hk为前述h(x)对x的偏导雅可比矩阵。因此可得EKF训练算法对应计算步骤如下所述。

(5)
3 实例分析
以“天狮号”绞吸式挖泥船在曹妃甸实际施工反馈的数据为例,共1 603组,作为实验数据。对生产数据进行预处理,包括剔除缺失值、3σ准则剔除粗大误差和平均移动平滑处理等。为了避免在建模时输入或者输出变量中数值大和数值小的分量绝对误差差异大,对输入和输出分别进行归一化处理,使其归一化后的数据在-1到1之间。测试样本和训练样本数的分配对神经网络的泛化能力有非常大的影响,如果训练样本太少,则学习不够充分,很难准确地映射神经网络输入输出之间的关系,甚至出现错误的规律。如果训练样本太多,则影响训练的速度,同时,在应用中泛化能力也不一定很好,有可能出现过拟合现象。根据经验[1]一般取训练样本为总样本的90%,测试样本为10%,所以,选取1 450组数据作为训练样本,剩下的153组数据作为测试数据进行实验。使用Matlab编程实现,预测效果如图1和图2所示。能耗和产量预测相对误差如图3所示。

图1 疏浚作业动态演化模型的能耗预测
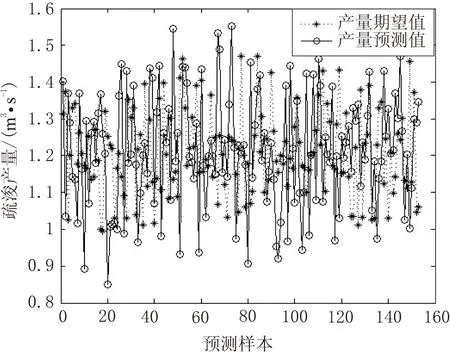
图2 疏浚作业动态演化模型的产量预测

图3 疏浚作业动态演化模型的能耗与产量预测相对误差
EKFNN融合了扩展卡尔曼的非线性滤波性能和BP神经网络的非线性拟合能力,能不断地更新最新的权值阈值,得到一个自适应动态演化的疏浚作业模型。从图3可知,在2个百分比误差中,疏浚作业能耗的百分比误差基本在0.015以内,而产量的误差百分比基本在0.2以内,已经达到了一个非常理想的拟合状态。为了显示EKF神经网络相比BP神经网络的优越性,将EKFNN与BPNN进行了对比,其结果如表1所示。
表1模型性能对比
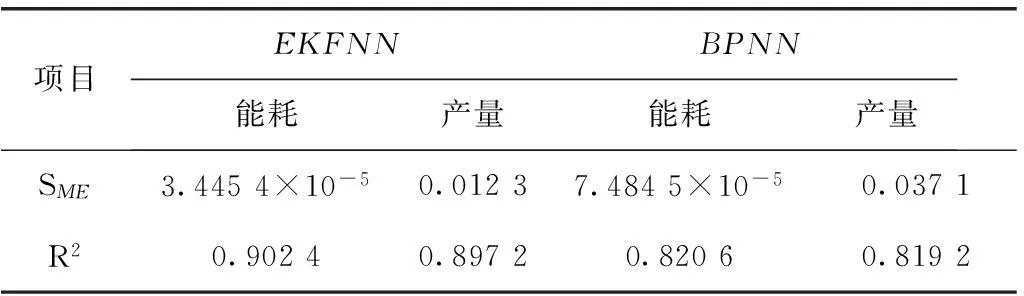
项目EKFNNBPNN能耗产量能耗产量SME3.4454×10-50.01237.4845×10-50.0371R20.90240.89720.82060.8192
在表1中,应注意2点:
a.SME为模型均方差,其值越小,表明模型的性能越好。
b.R2为决定系数,其范围在[0,1]内,越接近与1,表明模型性能越好;反之,越接近与0,表明模型的性能越差。
通过计算,得到EKFNN模型的能耗SME是3.445 4×10-5,产量的SME是0.012 3,BPNN模型能耗SME是7.484 5×10-5,产量的SME是0.037 1;而EKFNN模型能耗的R2是0.902 4,产量的R2是0.897 2,BPNN模型能耗的R2是0.820 6,产量的R2是0.819 2。EKFNN模型精度较BPNN模型精度更优,能够有效地对动态疏浚过程进行自适应动态跟踪。
4 结束语
提出了基于EKF神经网络的疏浚作业过程动态演化建模方法。在神经网络建模过程中引入卡尔曼滤波思想,利用扩展卡尔曼滤波实时更新神经网络模型的权重,从而获得能有效跟踪挖泥船疏浚过程工况变化的模型。在实际生产数据上,研究发现EKFNN的均方差比BPNN的结果要小,决定系数比BPNN要大。实验结果证明,EKF神经网络建立的疏浚作业动态模型相比BP神经网络模型精度更高、效果更好,能高精度地跟踪非线性动态演化疏浚作业过程。
参考文献:
[1]傅荟璇,赵红.Matlab神经网络应用设计[M].北京:机械工业出版社,2010.
[2]Yang Huizhong,Li Jiang,Ding Feng. A neural network learning algorithm of chemical process modeling based on the extended Kalman filter[J].Neurocomputing,2007,70(4/5/6):625-632.
[3]王法胜,郭权.基于扩展卡尔曼粒子滤波算法的神经网络训练[J].计算机工程与科学,2010,32(5):47-49.
[4]鲍星星,陈森发.基于扩展卡尔曼滤波的神经网络算法的公路货运周转量预测[J].交通与计算机,2008,26(6):11-12.
[5]李江,杨慧中.一种基于扩展Kalman滤波器的神经网络学习算法[J].东南大学学报:自然科学版,2004,34(增刊):230-236.
[6]Tang Jianzhong,Wang Qingfeng,Bi Zhiyue.Expert system for operation optimization and control of cutter suction dredger[J].Expert Systems with Applications,2008,34(3):2180-2192.
[7]邹邵云.基于专家系统的挖泥船作业辅助分析与优化决策研究[D].武汉:武汉理工大学,2012.
[8]任经纬.绞吸式挖泥船疏浚监控系统的构建[J].中国科技博览,2009(30):123.
Abstract:This paper presents a dredging dynamic evolution modeling method based on an extended Kalman filter neural network algorithm.The concept of the Kalman filter is introduced in the process of neural network modeling.Using the extended Kalman filter real-time updating weights of the neural network model,effective models showing the variation of dredger dredging process conditions can be tracked.
Key words:dredging;extended Kalman filter neural network;energy consumption and production;model
作者简介:李凯凯(1988-),男,山西临汾人,硕士研究生,研究方向为疏浚工艺决策;许焕敏(1974-),女,山东聊城人,讲师,博士,研究方向为疏浚工艺决策。
基金项目:中央高校基本科研业务费专项资金资助(2014B10122)
收稿日期:2015-02-04
文章编号:1001-2257(2015)06-0023-03
文献标识码:A
中图分类号:TP29
猜你喜欢
童话王国·奇妙逻辑推理(2024年5期)2024-06-19 16:03:38
网络安全与数据管理(2022年1期)2022-08-29 03:15:20
导航定位学报(2022年4期)2022-08-15 08:27:00
中学生数理化·中考版(2022年8期)2022-06-14 06:55:24
新世纪智能(数学备考)(2021年9期)2021-11-24 01:14:36
成都医学院学报(2021年2期)2021-07-19 08:35:14
新世纪智能(数学备考)(2020年9期)2021-01-04 00:25:14
中学生数理化·七年级数学人教版(2020年10期)2020-11-26 08:24:50
数学物理学报(2020年2期)2020-06-02 11:29:24
光学精密工程(2016年6期)2016-11-07 09:07:19
