
基于神经网络的通用非线性神经自适应控制研究
2015-12-17 05:37:49程媛媛
电脑知识与技术 2015年28期
程媛媛
摘要:该文提出了一个适用于非线性不确定系统的通用的自适应神经网络控制方案,其中只有一个神经网络同时作为控制器和识别器,控制器采用广义的反向传播学习算法(GBP)作为控制器学习算法,实现了学习误差与控制误差的统一,控制器的学习过程就是控制规律控制更新算法的更新过程,不需要额外的控制算法。该控制方案算法简单,控制速度快,实时性好,是一种高效的非线性神经网络控制方案。
关键词:神经网络;非线性;控制
中图分类号:TP3 文献标识码:A 文章编号:1009-3044(2015)27-0139-03
Abstract: In this paper, one for uncertain nonlinear systems adaptive neural network control program common, of which only a neural network controller and at the same time as the identifier, the controller uses the generalized backpropagation learning algorithm (GBP) as controllers learning algorithm to achieve a unified learning error and control error learning process controller is to control law to control update algorithm update process, no additional control algorithms. The control scheme is simple algorithm, control speed, real-time, is a highly non-linear neural network control scheme.
Key words: neural network; nonlinear; control
神經网络的应用相当广泛,一般常用于优化、决策、分类问题以及预测等方面。因为神经网络是一种具利用大量的运算单元(神经元),以平行且分散的方式进行运算,具有学习、回想与归纳推演的能力,所以神经网络技术在非线性不确定系统的识别和控制方面得到应用。
根据神经网络的特点,提出来一种对传统神经网络改进的结构,通用非线性神经自适应控制可以在传统的神经网络基础上进行了改进,不需要独立的识别器,集成了识别器和控制器,减少了控制误差,系统的闭环控制稳定系数提高,控制器采用了广义的反向传播学习方法,使神传统经网络的算法和处理速度得到提升。
1 传统神经网络 BP 算法与广义反传控制
神经网络是一种并行分布处理数据的处理器,具有适应环境变化对突发变化的情况可以随机变化。此外,在一个动态环境中,突触权重可以根据自身的设计进行改变。多样化的神经网络的能力都来自其适应能力的突触权重,如学习能力,识别能力的自适应控制能力[1]。神经网络的学习算法决定着突触权值的学习适应能力,神经网络较为传统的算法就是BP算法,BP算法的识别过程如图1所示。
所以BP神经网络的学习过程是对神经元的修正和积累,可以将神经网络与未知系统出的误差降到最低,从而对数据的处理近似到精确值。
广义反传控制是对BP神经网络的算法的一个扩展,对传统的BP神经网络算法中的非线性未知系统包含在误差反传过程中,广义反传算法GBP可以自适应控制,在控制过程中不需要传统的识别功能,在控制过程即可对其识别,减少了单独识别过程,广义反传控制过程如图2所示。
2 广义反传控制算法
为简化起见,此处只考虑单输入单输出系统,相应的情况很容易扩展到多输入多输出系统。对于公式(8)式,
规则1:由GBPNNC和被控系统构成的整个系统可以看成一个整体的神经网络,被控系统被看成为一个复杂神经元,被当做整个神经网络的输出层,整个神经网络由GBPNNC以及未知系统神经元构成,GBPNNC的突触权值更新规则遵守GBP算法,即GBPNNC的突触权值更新规则由式公式(3))确定,当神经元为GBPNNC输出层神经元时,局域梯度公式(3)按公式(8)计算,其他情况按公式(5)计算[3]。
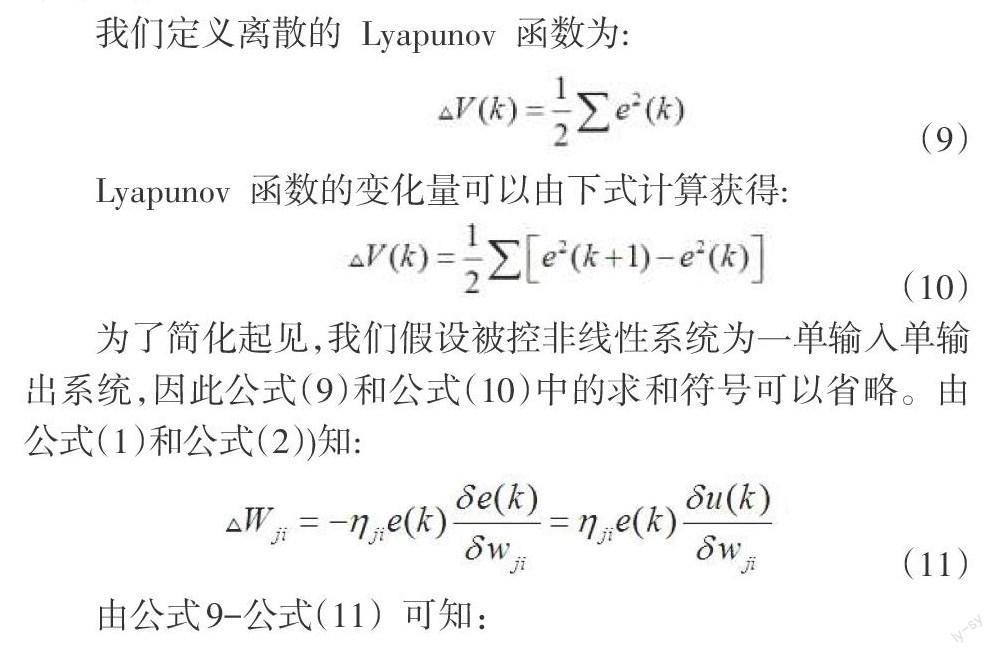
3 GBP 控制方案的收敛性与稳定性分析
GBP控制方案是基于GBP学习算法的,从更新规则(3.3)可以看出,为了保证控制方案的收敛性和稳定性,合适的学习率是必需的。本节将基于Lyapunov函数方法导出一种自适应的学习率。
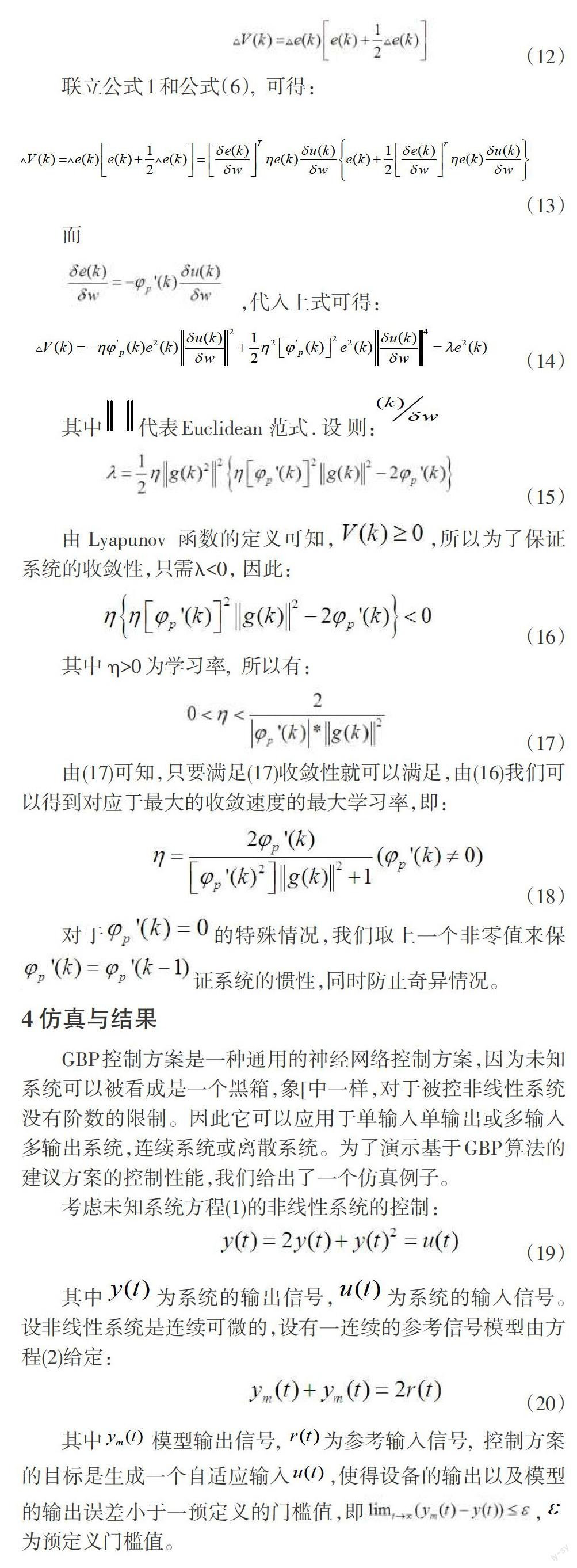
4 仿真与结果
GBP控制方案是一种通用的神经网络控制方案,因为未知系统可以被看成是一个黑箱,象[中一样,对于被控非线性系统没有阶数的限制。因此它可以应用于单输入单输出或多输入多输出系统,连续系统或离散系统。为了演示基于GBP算法的建议方案的控制性能,我们给出了一个仿真例子。
考虑未知系统方程(1)的非线性系统的控制:
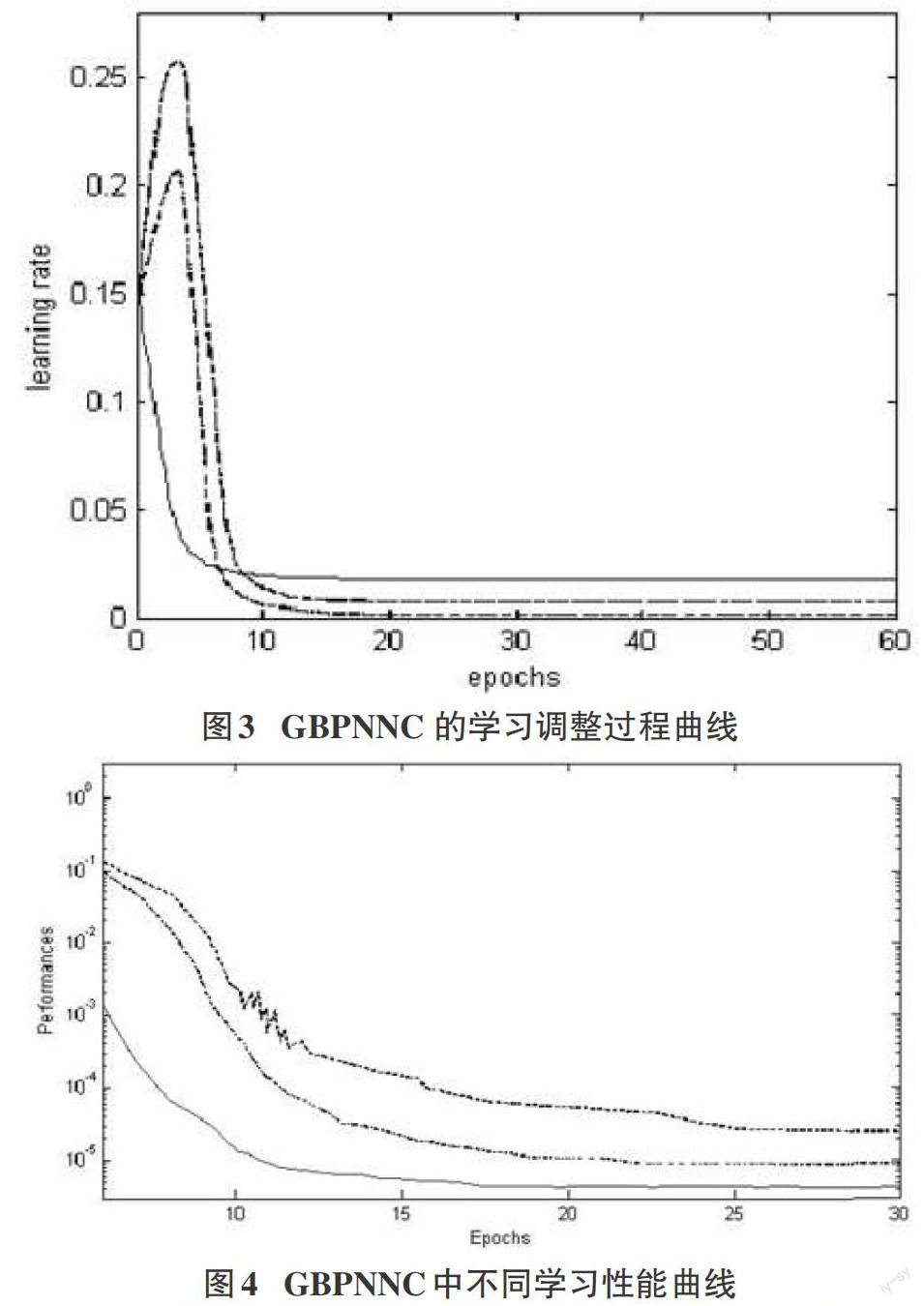
在图3中,实线为输出层神经元的学习率变化情况,虚线为隐藏层和输入层神经元的学习率变化情况,从图3可以得出,通过改变传统神经网络的算法,可以缩短误差和计算时间,提高了运算效率。在图4中可以看出,GBPNNC控制方法与直接逆神经控制方法进行的比较,自适应学习率的GBPNNC控制方法优于固定学习率的GBPNNC方法,本文提出的这种控制方法减少了控制误差和提高了收敛速度。
5 结语
本文提出了一种基于神经网络的通用非线性神经自适应控制方案,该方案是在传统的BP算法上进行了改进,得到广义反传GBP算法,将识别和控制在一定程度上进行了统一,控制误差得到了降低,该方案操作简单,实时性能好,收敛速度快,在非线性不确定控制方面起到了一定的效果。
参考文献:
[1] 古勇, 苏宏业, 诸健. 循环神经网络建模在非线性预测控制中的应用[J]. 控制与决策, 2000, 15(2): 254 -256.
[2] 陈增强, 赵天航, 袁著祉. 基于Tank-Hopfield 神经网络的有约束多变量广义预测控制[J].控制理论与应用, 1998, 15(6): 847 -852.
[3] 李翔, 陈增强, 袁著祉. 基于 T-S 模型的模糊神经网络的广义预测控制[C]. 第三届全球智能控制与自动化大会论文集, 2000: 885 -889.
[4] 任怀庆. 非线性不确定系统的神经网络控制研究[D]. 吉林大学, 2014(6):33-45.
猜你喜欢
电子制作(2019年19期)2019-11-23 08:42:00
汽车科技(2016年5期)2016-11-14 08:03:52
科技视界(2016年23期)2016-11-04 08:14:28
科技视界(2016年21期)2016-10-17 17:06:18
科学与财富(2016年28期)2016-10-14 00:06:31
大众理财顾问(2016年9期)2016-10-11 17:10:17
科技视界(2016年24期)2016-10-11 12:53:13
科技视界(2016年20期)2016-09-29 13:07:14
大众理财顾问(2016年8期)2016-09-28 14:00:43
重型机械(2016年1期)2016-03-01 03:42:04
