基于K60的交通指挥机械手臂设计
2015-12-17 04:55:26张姗姗黄勤珍
西南民族大学学报(自然科学版) 2015年3期
龙 玲,张姗姗,黄勤珍
基于K60的交通指挥机械手臂设计
龙 玲,张姗姗,黄勤珍
(西南民族大学电气信息工程学院,四川 成都 610041)
为了提高城市交通指挥工作效率和可靠性,提出一种基于K60单片机的交通指挥机械手臂设计,该机械手臂通过舵机和各种支架构成,具备两关节且每个关节能360度自由运动.采用K60单片机作为主控器,通过前端检测到的实际路口交通情况,自动摆出相应的指挥手势,协助交警指挥交通.该设计不仅可以高效率的完成指挥任务,还对智慧城市的交通建设有着重要的意义.
机械手臂;舵机;交通指挥;K60
1 引言
自从1958年美国的联合控制公司研制出了世界第一台机器人以来,如今机器人技术已经广泛应用于机械、电子、化工、汽车等领域[1].而机械手臂是机器人的一个重要分支.机械手臂可以代替人处理一些高危险、高危害、高工作负荷的工作,大大加快了工作效率,拓宽工作范围[2-3].此外,机械手臂作业的准确性和各种环境中完成作业的能力,在各个领域拥有广阔的发展前景[4-5].
面对机械手臂强大的工作能力和广泛的工作范围,我们提出是否可以将机械手臂应用于交通指挥呢?如今,交警执法时存在受时间、地域的限制和天气的影响以及警力不足等问题,虽然交通指挥手势单调重复,但是交通指挥的重要性时时刻刻让交警保持警惕.于此,本文提出一种可以应用于交通指挥的机械手臂.此机械手臂由舵机和支架搭建而成,具备三关节六自由度的特点.通过对K60单片机[6]编程,手臂能模仿交警指挥动作指挥交通,能有效发挥机械手臂的优势,减轻交警指挥的工作强度.
2 系统硬件设计
本设计中包含两个机械手臂,手臂主要组成部件为舵机、金属舵盘、硬质铝合金长U型支架、硬质铝合金L型支架、硬质铝合金U型梁.其中手臂的固定平台由三个U型梁拼接而成;四个U型支架通过螺丝搭接为手臂臂部;手臂的关节则由两个舵机和两个舵盘构成,使手臂具有灵活的自由度,实现上下、左右两个方向的运动[7].单片机通过产生PWM波控制舵机的运动,从而控制手臂各个关节的运动,而各个关节之间的相互配合完成各种指挥手势.
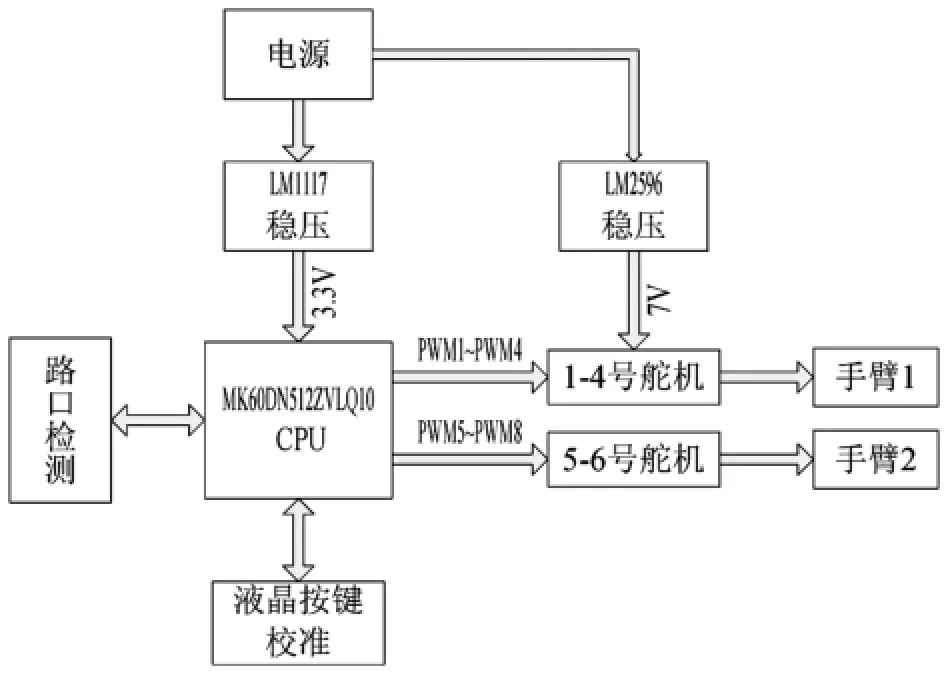
图1 系统结构原理框图Fig.1 System structure principle diagram
系统硬件电路共分为单片机最小系统、电源模块、PWM波输出模块和校准模块四部分.该设计采用了由飞思卡尔公司设计的MK60DN512ZVLQ10型单片机[8],它是一款基于Cortex-M4内核的,具有低功耗特点的高性能32位单片机[9-10].系统结构原理框图如图1所示,K60单片机根据接收到检测模块返回的路口情况的信号配置PWM波,实现对手臂的控制.由于手臂长期工作可能会影响手势的正确性,校准模块的加入为日后的调试带来便利.该模块主要由液晶与按键组成,通过观察液晶上实时显示各个舵机的参数,我们可以使用按键调节这些参数以达到我们的要求.
2.1 PWM输出模块设计
舵机是一种置伺服的驱动器,它是机器人、机电系统和航模的重要执行结构[11].它可以接收一定的控制信号,然后输出一定的角度,适用于需要角度不断持续变化的控制系统[12].本设计中双轴舵机双轴舵机双轴舵机负责手臂肘关节上下运动的部位采用双轴舵机,它是一款180度大扭力数码舵机,可带动15公斤的负载.因此在手臂肘关节支撑整个手臂长时间被举起时,不会产生抖舵、发热现象,不会影响手臂的指挥动作.而手臂中其他部位在手臂运动中受力比较小,我们则采用扭力小一点的负载为7公斤的MG996舵机.
舵机控制线输入的PWM信号是一个周期性的方波脉冲信号,其周期是20ms,频率是50Hz.输入的方波脉冲宽度改变时,舵机转轴的角度相应发生变化,对应的角度变化与脉冲宽度的变化成正比,也就是利用占空比的变化改变舵机位置.在本设计中通过对K60单片机的GPIO口和FTM模块底层驱动配置,使八路PWM波从单片机的PTA0-PAT7口输出,每路PWM波控制着一个舵机.最后八路PWM波协同控制,使舵机转轴偏转不同的角度,实现手臂的指挥动作.
2.2 电源模块设计
本设计包含部件的工作电压主要有两种,所以电源模块将根据不同的需要提供两种电压.其中,一部分是K60单片机最小系统的电源,另一部分是舵机的电源.首先,K60最小系统需要的电源电压为3.3V,于是我们采用LM1117作为稳压芯片.该芯片是一个低压降稳压器,输出电流可达800mA,输出电压为3.3V.此外,输出电压除为最小系统供电外,还为液晶提供工作电压.

图2 LM2596电路原理图Fig.2 LM2596 circuit principle diagram
其次,我们在本设计控制手臂中采用MG996舵机与双轴舵机,两种舵机的输入电压都为4.8V-7.2V.为了让手臂具有较大的扭力,且舵机在工作时安全稳定,经过试验比较舵机最适合采用7V的输入电压.于是我们选用LM2596为舵机提供工作电压,它是压降型电源管理单片机集成电路,能够输出3A的驱动电流,同时具有很好的线性和负载调节特性[13].如图2 LM2596电路原理图所示,电源电压从IN脚输入后,从OUT脚输出经过滤波输出电压.输出电压受反馈电压控制,通过调节反馈电阻,得到想要的输出电压.输出电压Vout=Vref(1+R1/R2),其中Verf=1.23V.电位器电阻R1=R2(Vout/Verf-1),为了确保输出稳定,R1选标称阻值1KΩ,精度1%的电阻.
2.3 校准模块
校准模块中主要包括按键与12864液晶.由于在本设计中共有八个舵机,而舵机又需要八路PWM波来控制.更重要的是,手臂每摆出一个动作,八个舵机都要调到相应的角度,并且指挥手势中有较多的动作,所以在手臂执行整个指挥手势中,控制各个舵机的PWM波就有很多变化.为了让PWM波能按时正确变化,手臂能完美的实现预期的指挥手势,就需要液晶实时显示各个舵机的参数,然后我们使用按键调节这些参数以达到我们的要求.
本设计我们采用的是由龙丘生产的高清晰度OLED.该款液晶尺寸小,只有0.96寸.但分辨率高,分辨率为128∗64,显示效果远超过LCD.单片机只用到CS(片选管脚)、DC(命令数据选择管脚)、RES(复位管脚)、D0(时钟脚)、D1(输入数据脚)五只引脚.当配置好液晶底层驱动后,只需要单片机将PWM波的占空比读出,通过D0口发送给液晶即可显示.然后设置每个PWM波参数的显示位置,液晶上就能同时显示八路PWM波的占空比,我们就可以结合液晶上的参数和实际情况进行调试.
3 系统软件设计
系统软件设计主要由主函数、初始化子函数、定时器中断函数和检查函数构成,图3为系统主控程序流程图.
如图3所示,初始化子函数包括一个PIT定时初始化函数,用于产生1ms的中断;一个FTM初始化函数,用于产生八路PWM波;一个系统时钟初始化函数,用于开启系统时钟,得到96MHz系统时钟和48MHz总线时钟;一个GPIO口初始化函数,用于配置系统所需端口;一个液晶初始化函数,用于驱动12864液晶显示.
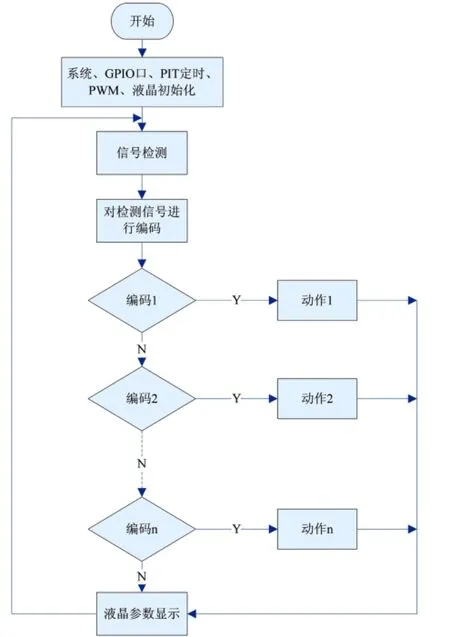
图3 系统主控程序流程图Fig.3 System main control program flow chart
单片机通过串口将路口的各种交通情况读入,然后将这些信息通过端口PTC0-PTC7进行编码.一种交通情况对应着一种编码,且一种编码对应着一套指挥手势.在中断程序中通过 if语句来检测这些编码[14-15].一旦检测到与程序设定的相同编码时,就会执行相应的指挥手势.
4 结束语
机械手臂是一种能够进行自动化定位控制并且可以根据需要编写程序的多功能机器装置,它可以有多个自由度,可以在不同环境中工作,具有很好的移植性和适应性.本文将机械手臂应用于交通指挥,可以在不用改动现有交通设备的基础上,直接投入使用,减少因投入使用中附加的建设成本.其次,此机械手臂协助交警指挥交通,一定程度上避免执法时存在受时间、地域的限制和天气的影响以及警力不足等问题,降低交警工作强度,使得交通指挥更加人性化和全面化.因此,机械手臂加入交通指挥,让交通指挥智能化、科技化,必将于智慧城市相结合.
[1]赵杰,任思璟,崔崇信.基于ARM的危险作业机器人机械臂控制系统设计[J].工业仪表与自动化装置,2012,3:111-112.
[2]房娟.机器人手臂关节机械设计与实现[J].科技与企业,2012,13: 297-297.
[3]朱学军,泉照之.机器人机械手臂关节驱动控制系统设计[J].微计算机信息,2007,42:276-277.
[4]李德仁,姚远,邵振峰.智慧城市的概念、支撑技术及应用[J].工程研究:—跨学科视野中的工程.2012,4(4):313-323.
[5]李喆,王平莎,张春辉,等.国内智慧交通总体架构建设模式分析[J].交通节能与环保.2014.10(2):85-88.
[6]周成龙,张艺丹,易澄.基于K60单片机的SDRAM控制模型设计及实现[J].计算机光盘软件与应用,2013,16(16):66-67.
[7]徐新虎,李桂琴,王燕,等.服务机器人手臂轨迹规划的研究[J].机械设计与制造,2011,2:144-146.
[8]施鹤远,彭凯,申正卫,等.基于Cortex-M4的光电智能车路径识别最优化研究[J].计算技术与自动化,2014,33(2):112-114.
[9]程玉凯,陆倩.基于单片机的控制系统在智能机器人中的应用[J].保山学院学报,2011,30(5):55-58.
[10]王宜怀.嵌入式系统原理与实践[M].北京:电子工业出版社,2012.
[11]秦超.基于直流无刷电机的无线遥控机械手臂设计[J].消费电子,2014,16:40-40.
[12]宗光华.机器人创意与制作[M].北京:科学出版社,2004.
[13]张京,张根灿.基于CN3705和LM2596的锂电池充放电系统[J].电子技术与软件工程,2013,17:167-168.
[14]吴学礼,刘浩南,许晴.机器人手臂控制系统的设计与研究[J].河北科技大学学报,2014,35(4):361-365.
[15]谭浩强.C程序设计[M].北京:清华大学出版社,2012.
(责任编辑:张阳,付强,李建忠,罗敏;英文编辑:周序林)
A design of traffic command robotic arm based on K60
LONG Ling,ZHANG Shan-shan,HUANG Qin-zhen
(School of Electrical and Information Engineering,Southwest University for Nationalities,Chengdu 610041,P.R.C.)
In order to improve the work efficiency and reliability of traffic command in cities,this paper presents a design of traffic command robotic arm based on K60,which is formed by the steering gear and bracket of various shapes,and has two joints each of which can be of360-degreemovement.Single chip microcomputer K60 is selected as themain controlmodule.By detecting actual traffic conditions at intersections,robotic arms automatically swing a corresponding command gesture to assist the police directing traffic.This design not only can efficiently complete the command tasks,but also have important significance to intelligent urban traffic construction.
mechanical arm;steering engine;traffic command;K60
TP241
A
2095-4271(2015)03-0379-04
10.11920/xnmdzk.2015.03.022
2015-01-21
龙玲(1981-),女,苗族,贵州松桃人,实验师,硕士,研究方向:自动化测试技术研究.E-mail:long_ling_ll@163.com.
西南民族大学国家级大学生创新创业训练计划项目(201310656003).
猜你喜欢
数学物理学报(2021年6期)2021-12-21 06:24:08
今日农业(2020年14期)2020-12-14 19:47:34
液晶与显示(2020年8期)2020-08-08 07:01:46
自动化学报(2019年6期)2019-07-23 01:18:36
电子制作(2018年1期)2018-04-04 01:48:14
制造业自动化(2017年2期)2017-03-20 14:26:08
金色少年(奇趣科普)(2016年8期)2016-09-21 02:07:58
我爱学(创意美术与手工)(2016年4期)2016-07-14 06:34:54
少儿科学周刊·少年版(2015年4期)2015-07-07 22:02:23
液晶与显示(2015年1期)2015-02-28 21:15:54