
基于改进PI+PR控制的有源电力滤波器研究
2015-12-15 10:47杨新华委晓翠汪龙伟孙艳军
电气自动化 2015年4期
杨新华,委晓翠,汪龙伟,孙艳军
(1.兰州理工大学 电气工程与信息工程学院,甘肃 兰州 730050;2.甘肃省工业过程先进控制重点实验室,甘肃 兰州 730050)
0 引言
三相四线制系统在工厂供电、民用住宅和城市供电等电力系统中广为应用,其中的谐波和三相不平衡问题越来越引起人们的重视[1]。三相四线制有源电力滤波器(Active Power Filter,简称APF)是补偿谐波和解决三相不平衡问题的有效措施之一,以其较强的输出能力和灵活的补偿能力受到了广泛的关注和研究[2]。
并联型APF主要用于补偿具有电流源特性的谐波源,它向电网注入补偿电流,并抵消谐波产生的谐波电流,使电网电流为正弦波[3]。在三相系统中,任意次谐波均是交流信号,都可以经过同步旋转坐标变换后转换为直流分量,再使用PI控制以达到无静差控制,但是整个过程计算量大,数字控制器实现起来很复杂[4]。而比例谐振(Proportional Resonant,简称 PR)控制可以对特定频率的交流信号实现无静差跟踪[5],但是各个频率的交流信号均需要单独的PR控制器,用现有的数字控制器实现一系列的PR控制器也是比较复杂的工作[6-7]。在对APF指定次补偿进行深入研究的基础上,针对PI和PR控制的特点,提出改进控制方案:在采用常规PI控制的基础上,本方案采用PR控制对负载电流主要谐波(5、7、11、13次)进行单独地补偿,而对其余次谐波采用常规电流PI控制器统一补偿。
1 三相四线制APF系统结构
对于三相四线制并联型APF,目前常用的两种拓扑结构分别为四桥臂桥式结构和三桥臂分立电容结构,其中四桥臂APF的直流侧电压控制简单,并且可以直接对中线电流进行灵活控制,因此采用三相四桥臂拓扑结构,如图1所示。

图1 三相四线制APF系统结构图
2 指定次谐波检测方法
目前应用和研究的谐波电流检测方法有很多种,其中应用较为广泛的是基于三相瞬时无功功率理论的各种检测方法,如ipiq法,p-q法,d-q法。本文采用ip-iq法提取指定次谐波电流。在谐波检测算法中,锁相环至关重要,为了在电压畸变、不平衡等情况下快速准确地提取电网电压信息,本文采用基于二阶广义积分器的软件锁相环,原理如图2所示,使用其提取基波电压的原理如图3所示。
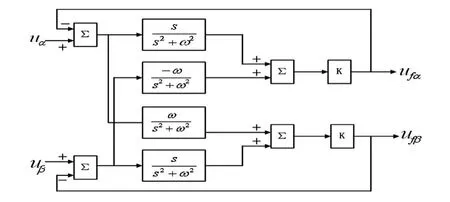
图2 广义积分器

图3 基于广义积分器的基波电压提取
基于二阶广义积分器的锁相技术可以精确地锁相、提取是谐波检测的前提,再对需要检测的k次谐波电流进行矩阵变换、低通滤波和矩阵逆变换,就可以得到k次电流的正序分量,如图4所示。在三相四线制系统中,三相电流的负序分量和正序分量分别对称,同理就可以检测出负序分量。三相电流的零序电流相等,为了获得指定次谐波的零序电流,采用等效三角变换法检测[8]。
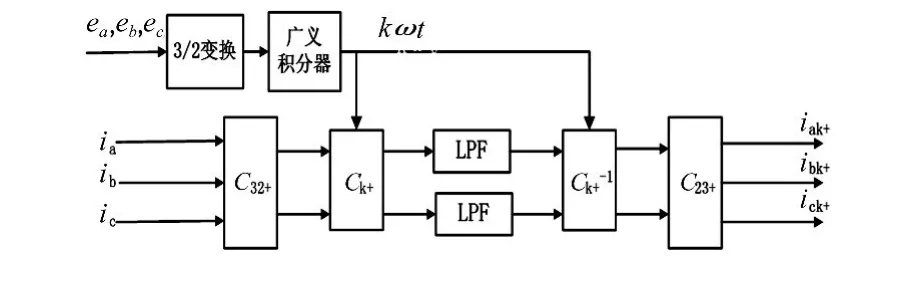
图4 k次谐波的正序分量检测原理
将上述方法所检测到的k次谐波的正、负、零序分量相加,就可以得到所需检测的指定次谐波。
3 PI+PR指定次谐波补偿控制策略
在三相四线制系统中,谐波的次数为k=6n±1,n=1,2,3…,而且随着谐波次数的增加,谐波含量减小。本文提出一种改进型谐波控制策略,对主要次谐波(本文指5、7、11、13次)进行单独提取和PR补偿,而对其余次谐波采用PI控制器统一补偿。
PR控制器可以实现频率与谐振频率相一致的正弦信号的无静差跟踪,其传递函数为:

其中比例系数KP改变系统动态响应速度,积分系数KI只是改变谐振控制器对其它频率信号的衰减程度,而并不能改变其带宽,而较小的带宽意味着对频率变化的适应性较差,为此采用改进型PR控制器如式(2)所示[9]:

其中ωc为截止频率。增加ωc,带宽变大,同时ωc对谐振频率处的增益没有影响。
对主要次谐波(5、7、11、13次)采用PR控制器进行控制,只需要设置谐振频率与指定次谐波频率相同的谐振控制器来实现电流的跟踪控制,如图5所示。其中ω1为基波频率为主要次谐波补偿电流指令信号,可以通过谐波电流检测环节获取,imain为逆变器输出电流的主要次谐波分量,Δimain为实际输出的补偿电流与指令信号的偏差,所以主要次谐波(5、7、11、13次)的电流控制器传递函数为:

PI+PR指定次谐波电流控制框图如图6所示,其中i*ref为除基波正序分量以外的谐波分量,if为逆变器的输出电流,es为系统电压,GPI,GPR,GPWM分别为PI,PR控制器传递函数及逆变器传递函数。
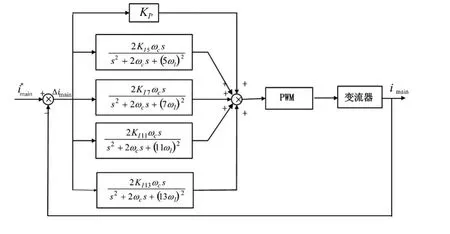
图5 电流环PR控制原理框图
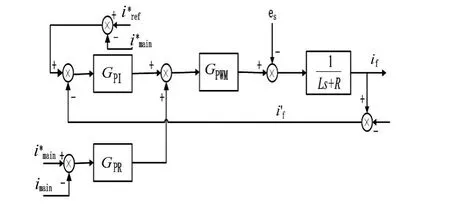
图6 新型指定次谐波电流控制框图
4 仿真分析
为了验证本文所提控制方法的正确性,利用MATLAB/Simulink对系统进行建模仿真,主电路模型如图1所示。在仿真系统中,电源采用线电压为380 V的三相电源,逆变器开关频率设置为10 kHz,负载采用三相不控整流桥带RL型负载,R为10 Ω,L为0.5 mH,APF的进线电感为4 mH,进线电感等效电阻为0.3 Ω,并设置直流侧电容电压为750 V。
图7为负载电流波形,由图可以看出负载电流波形畸变严重,对其进行FFT分析可得,a相电流的畸变率为26.83%,其中5次谐波含有率为22.71%,7次谐波为9.89%,11次谐波含有率为7.81%,13次谐波含有率为4.55%。
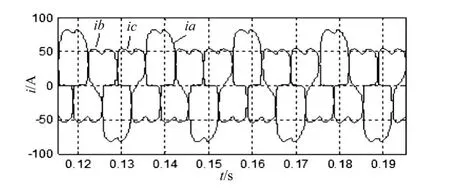
图7 负载电流波形
并 联APF采用PI控制器对系统电流补偿后,电网侧电流的波形及其频谱如图(8)所示,电流的总畸变率下降为9.32%,其中 5、7、11、13次谐波含有率分别为5.01%、2.98%、2.45%、1.32%。采用PI+PR控制器对主要次谐波电流单独控制补偿后,电网侧电流的波形及其频谱如图(9)所示,电流的波形得到了很好的改善,总畸变率降为2.55%,其中5、7、11、13次谐波含有率为 0.79%、0.71%、0.62%、0.58%。
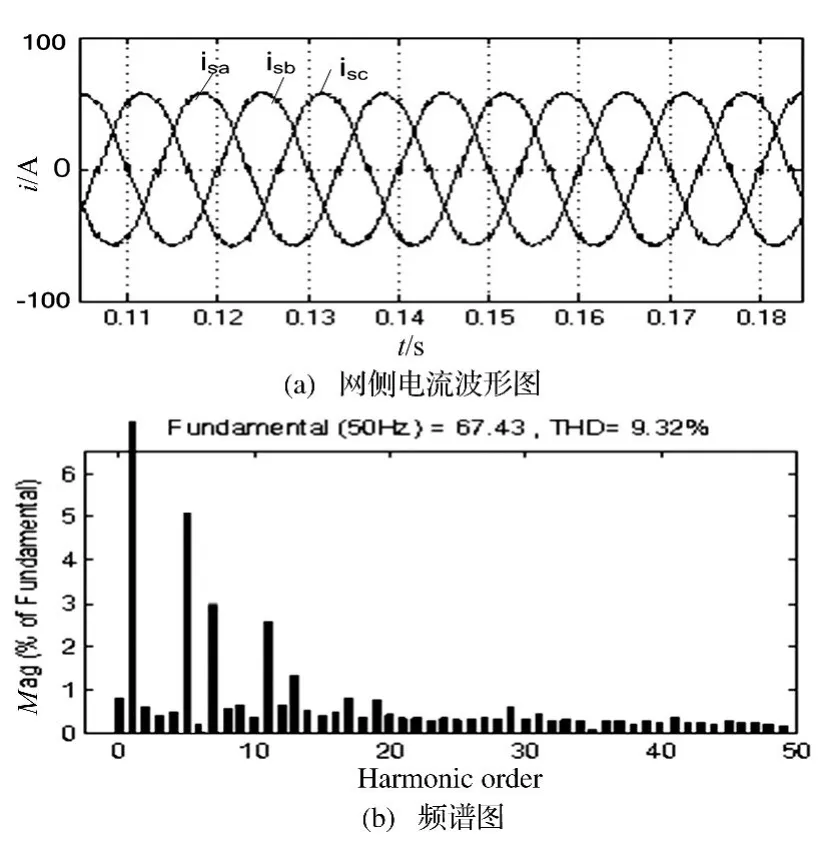
图8 电流PI控制波形图
对比上述结果可以看出,相对于传统电流的PI控制策略,PI+PR指定次电流控制策略降低了网侧电流的畸变率,能很好地跟踪补偿主要次谐波(5、7、11、13 次),改善PI控制对主要次谐波补偿不充分的问题。

图9 新型电流控制波形图
为了验证所提控制策略的动态性能,在0.5 s时突加负载,仿真波形如图 10所示,从波形可以看出,该电流控制策略可以很好地跟踪指令电流的突变,并可以在一个周期内进行补偿处理。仿真结果表明所提指定次谐波控制策略对负载的波动适应性良好。
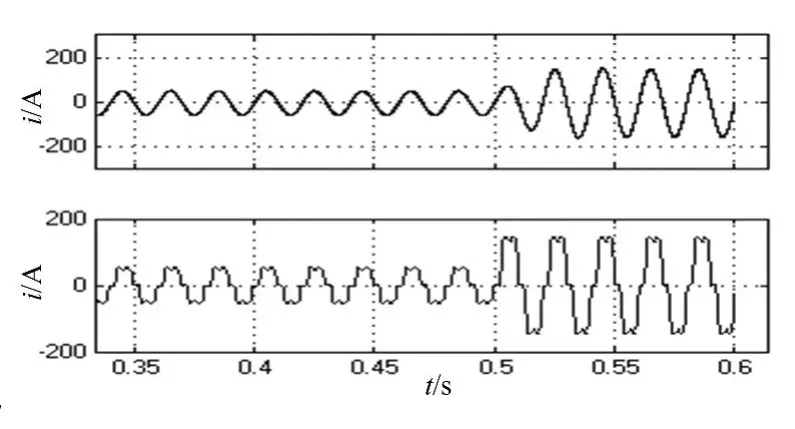
图10 负载突变波形
5 结束语
通过分析可知,在深入分析电流PI控制及PR控制特点的基础上,提出了一种改进型指定次谐波电流的控制策略,并通过仿真试验验证了该控制策略对负载电流的主要次谐波进行了很好地跟踪补偿,使网侧电流各主要次谐波的含量均达到1%以下,同时总谐波畸变率很明显降低,波形得到改善。在负载突变的情况下,该控制策略能快速地响应指令的突变并进行补偿,提高了APF补偿效果和系统的可靠性。
[1]卓放,杨君,王兆安,等.用于三相四线制系统的有源电力滤波器研究[J].西安交通大学学报,2000,34(3):87-90.
[2]胡楷,潘孟春,于晶荣.100 kVA三相四线有源电力滤波器的研制[J].电工电能新技术,2010,29(1):30-34.
[3]张兴,张崇巍.PWM 整流器及其控制[M].北京:机械工业出版社,2012.
[4]张树全,戴珂,谢斌,等.多同步旋转坐标系下指定次谐波电流控制[J].中国电机工程学报,2010,47(3):55-62.
[5]AKAGI H.Active harmonic filters[J].Proceedings of the IEEE,2005,93(12):2128-2141.
[6]宫金武,查晓明,陈佰锋.一种快速重复控制策略在APF中的实现和分析[J].电工技术学报,2011,26(10):110-117.
[7]MATTAVELLI P.A closed-loop selective harmonic compensation for active filters[J].IEEE Transactions On Industry Applications,2001,37(1):81-89.
[8]周林,栗秋华,张凤.三相四线制系统任意次谐波电流的检测新方法[J].高电压技术,2007,33(11):160-163.
[9]周娟,张勇,耿乙文,等.四桥臂有源滤波器在静止坐标系下的改进PR控制[J].中国电机工程学报,2012,49(6):113-120.
猜你喜欢
防爆电机(2020年5期)2020-12-14
防爆电机(2020年3期)2020-11-06
哈尔滨铁道科技(2020年4期)2020-07-22
山东冶金(2019年3期)2019-07-10
电子制作(2019年23期)2019-02-23
电子制作(2018年18期)2018-11-14
通信电源技术(2018年5期)2018-08-23
消费导刊(2018年10期)2018-08-20
电力系统及其自动化学报(2016年5期)2016-12-01
电气化铁道(2016年6期)2016-05-17
