
大型风机的电伺服独立变桨控制系统研究
2015-12-15 10:47窦真兰吴国祥赵金良
电气自动化 2015年4期
窦真兰,吴国祥,赵金良
(1.国网上海市电力公司电力科学研究院,上海 200437;2.江苏南通大学 电子信息学院,江苏 南通 226019;3.上海电气输配电集团,上海 200042)
0 引言
风能作为可再生的绿色能源,已经受到世界各国的普遍重视,成为了最具有大规模开发和商业化发展前景的新能源。变桨距控制技术是风力发电技术中的一项重要内容,通过控制动力系统调节桨叶迎风面与纵向旋转轴的夹角(即桨距角),以改变桨叶的升力和阻力。相应的变桨距控制系统在风速低于额定风速时,其变桨控制器将桨叶的桨距角置于零度附近,不做变化,近似等同于定桨距调节;在额定风速以上时,变桨距控制作用,调节桨叶桨距角,将输出功率限制在额定值附近;在紧急故障时,调节桨距角使桨叶顺桨,降低风轮转速,减小对风力机负载的冲击,提高系统寿命。总之,变桨控制技术大大提高了整个风电发电系统的发电效率和电能质量[1-2]。据最新资料显示,Nordex公司的N90-2500 kW风电机组、GE公司的3.6 MW风电机组、Repower公司的5 MW风电机组等都采用电动变桨系统。
电伺服独立变桨控制系统常采用位置、速度和电流三闭环的永磁同步电机(PMSM)控制系统,其位置控制器直接影响系统的定位控制和位置跟踪性能。PMSM本身具有非线性、强耦合特性,对外部桨叶负载扰动和参数变化比较敏感,难以建立精确的数学模型。此外,变桨控制系统还同时面临着许多不确定的外部干扰因素,如风剪切、湍流、塔影等。在系统控制方面要求位置控制器在位置偏差偏大时能够快速跟踪,位置偏差偏小时能够平滑运行并精确定位。变桨控制系统的这些特点对控制器性能提出了较高的要求。
常规的PID很难满足变桨控制系统的快速动态响应、稳态运行平稳以及定位精度高等特性,且不受参数变化和外界扰动的影响。为了克服这一缺点,文献[3]采用模糊控制策略,提出将论域缩小,采用多层模糊控制器等,使输入输出特性趋于平缓,改善系统的稳态特性,优点是无需建立被控对象的数学模型,对被控对象的时滞、非线性和时变性具有较强的适应能力,对干扰后噪声具有很强的鲁棒性,但是其本身消除系统误差的性能比较差,难以达到较高的控制精度;文献[4]提出采用滑模模糊控制,虽然具有较强的抗参数扰动能力,但是无法消除抖动问题;文献[5]提出单神经元自适应PID控制,主要是在忽略PMSM非线性因素的情况下,采用线性控制策略控制PMSM,在一定程度上对负载扰动具有鲁棒性,但在很多情况下不能达到理想的暂态性能;文献[6]采用模型参考自适应控制(MRAC)策略,以参考模型的输出调整控制规律来适应控制过程中参数的变化、干扰等不确定因素,在一定程度上获得了较为满意的控制效果,但是当控制系统及控制目标发生较大程度的改变时,MRAC往往由于参考模型固定、无法调节,而导致系统控制性能的下降,甚至导致系统的不稳定[7]。
针对以上控制策略的不足,本文综合模糊控制和PI控制策略,设计一种基于模糊推理的自调整PID的电伺服变桨控制系统的位置控制器,它通过模糊规则推理与决策,在线自适应调整PID参数(每次在线修改PID三个参数时只需模糊推理判断一次),不仅使变桨控制系统控制灵活、控制精度高、实时适应性强等优点,而且还能抑制各种非线性、参数时变等因素对变桨控制系统的影响,具有较强的鲁棒性。在独立变桨控制系统仿真平台基础上,搭建了电伺服独立变桨驱动控制系统的硬件平台,实验结果验证了电伺服独立驱动控制系统能够实现精确定位和快速跟踪。
1 变桨距载荷计算和伺服电机选型
电伺服独立变桨系统由变桨控制器、伺服驱动器和备用电源系统组成,三个桨叶可实现独立变桨[8-9]。当电伺服变桨距系统上电后,伺服电机带动减速机的输出轴小齿轮旋转,而小齿轮与回转支承的内环相啮合,从而带动回转支承的内环与桨叶一起旋转,实现了桨距控制。
桨叶作为被控对象,是伺服闭环控制的一个环节,它直接关系到伺服电机的选型以及伺服控制策略的有效性,因此准确计算变桨距载荷,建立桨叶负荷模型对独立变桨系统的电伺服驱动控制器研究至关重要。同时只有确定风机变桨时桨叶所能承受的载荷,伺服电机、减速器相对应的功率、转矩和尺寸等参数才能被具体确定。
1.1 变桨距载荷的计算
风力机的变桨距机构在工作状态下,作用于桨叶变距轴上的阻力矩主要包括:桨叶本身质量离心力产生的惯性力矩Mc、空气动力作用在桨叶上产生的气动力矩Mz、桨叶绕其纵轴转动产生的惯性力矩Mm、桨叶重心偏离桨叶变距轴产生的重力矩Mg、弹性变形引起的力矩Me、由变桨机构各摩擦而产生的摩擦阻力矩 Mf[10]。
(1)桨叶本身质量离心力产生的惯性力矩
风轮在工作时,旋转桨叶在自身质量的离心力作用下产生惯性力矩。假设在运动过程中不存在因为桨叶变形而对旋转桨叶产生阻力的弹性力矩,取长度距离为dr的桨叶微元为研究对象,考虑根部为圆柱形及轮廓的存在,Mc表示为:

其中ρb为玻璃钢桨叶材料密度;Ωr为风轮转速;β为桨叶各截面的桨距角,J为转动惯量。
(2)空气动力作用在桨叶上产生的气动力矩
根据桨叶几何特性、风轮转速、风速和桨距角,利用叶素理论能够计算出桨叶上的载荷。但是由于气动力产生的力矩相对离心力引起的惯性力矩Mc较小,且气动力矩引起的力矩方向是使桨距角β增大的方向,为了简化运算,可忽略它[10]。
(3)桨叶绕其纵轴转动产生的惯性力矩
由于变桨系统为位置系统,要求具有快速响应速度,因此必须考虑Mm的影响。根据动力学,惯性力矩为:

其中Jb为桨叶纵轴转动惯量;为桨叶最大变桨速度;t为桨叶变距速度从0变化到wpmax的最小加速时间。
(4)其它力矩
本文假设桨叶轴位于风轮旋转平面内,并且均匀通过各截面重心,则Mg=0。同时不考虑桨叶变形问题,则Me=0。
定义桨叶顺桨时产生的变桨力矩方向为正向,则开桨时产生的变桨力矩为负值。根据上述前面详细分析的作用于桨叶变距轴上的阻力矩和方向,变桨距驱动机构所承受的变桨驱动力矩表示为:
关桨时:

开桨时:

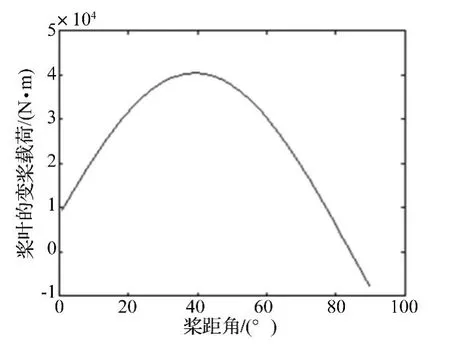
图1 桨叶的变桨载荷随桨距角变化的曲线图
从安全角度出发,取M关=Mc+Mf+Mm作为变桨机构的驱动力矩 MP。依据2 MW风机桨叶的翼型参数和气动参数,计算出风机的变桨载荷,其与桨距角的变化曲线如图1所示。当桨叶从关桨状态转变为开桨状态时,MP先从小变大,然后又逐渐变小,并在β=39(°)时,MP_Max=40 416 N·m,这也反应了由离心力引起的变桨力矩对桨叶变桨驱动力矩影响最大。
1.2 伺服电机的选型
在风力发电机组出现紧急故障需要立即顺桨并停机时,原则上要求在机械部件允许的应力下,变桨系统能够在0.8 s内从静止加速到最大速度10(°)/s。另外为了保证风力发电机组输出功率的稳定性以及精度性,要求变桨位置误差要求在0.01(°)以内,因此对于伺服电机的选型,首先考虑伺服电机的额定转矩及最大转矩,其次考虑伺服电机转动惯量小,响应速度快。在减速箱的齿轮比确定为1 800的前提下,根据紧急顺桨的变桨速度为10(°)/s,要求伺服电机最大转速为每分钟3 000转,因此考虑一定安全裕量,确定额定转速为每分钟2 000转,额定转矩为31.8 N·m,最大转矩为187 N·m,额定功率为7.5 kW的永磁同步电机作为电伺服变桨系统的伺服电机。
2 电伺服独立变桨控制器的设计
考虑到风速的随机不可预测性及桨叶负荷的快速波动性,变桨控制系统要求动态响应快、稳态运行平稳,因此PMSM采用基于转子磁场定向的矢量控制策略,满足制系统的动态响应快、精确定位和快速跟踪等硬性指标要求。本文设计的电伺服独立变桨驱动系统采用位置环、速度环、电流环三闭环控制,其控制如图2所示。当风机变桨时,变桨控制器给出桨距角给定β*(对应于伺服电机给定角度 θ*),与伺服电机位置反馈 θr进行负比较,作为位置调节器的输入,位置调节器的输出ω*作为速度调节器的给定输入。速度给定与电机实际速度的负比较,经过速度调节器,输出i*q作为电流给定值;电流给定值与实际的电流的负比较经过电流调节器,输出控制电压对三相逆变器的电压进行控制,实现对电流、转速和位置的控制[8]。其中电流环结合空间矢量脉宽调制技术,大大减少了转矩脉动,提高了动态响应的快速性和稳态运行的平稳性。
对电伺服独立变桨驱动控制器的设计,按照先内环后外环的原则,设计的控制器依次为电流控制器、速度控制器和位置控制器。考虑到电伺服独立变桨驱动控制系统的位置控制器需要具有很强的适应性:在位置偏差较大时能够快速跟踪;在位置较小时能够平滑运行并精确定位,无静态误差,有很强的抗干扰能力。另外电伺服变桨驱动系统存在的某些不确定因素,如被控对象PMSM的非线性、强耦合和参数时变等特性,桨叶负载变化,外部干扰因素等,因此电伺服独立变桨驱动系统的位置控制器采用基于模糊推理的自调整PID控制策略,在线自适应调整PID参数(即每次在线修改PID三个参数时只需模糊推理判断一次即可),如图2的虚线框部分所示。
模糊自适应PID控制器以桨距角偏差e和偏差变化率ec作为输入,利用模糊规则在线对PID参数调整,满足任意时刻对PID参数整定的要求。本文电伺服独立变桨驱动控制系统的位置控制器采用一种有效的模糊自调整方案,通过引入一个函数αP(t)作用于PID的参数KP和KI(KD=0),使动态系统响应迅速、稳态运行无误差,该控制方案的简单在于每次在线修改PID参数时只需模糊推理判断一次。

其中KI0和KP0是经过常规调试后确定的PI参数的初始值;γP为比例增益的调整系数,γP∈(1,1.4);βP为积分时间的调整系数,βP∈(0.6,1)。

图2 基于模糊自适应PID控制的电伺服变桨控制系统框图
αP(t)的在线调整由模糊推理实现:首先将位置偏差e和位置偏差率ec模糊化转换为输入量E和EC,其中隶属度函数采用高斯函数;然后结合具体受控过程及实际调试经验,采用最大—最小推理方法确定模糊推理规则,推理产生模糊变化量M,如表1所示,它反映αP在动态过程中应具有的变化趋势的模糊决策;最后通过重心法解模糊得到m(t),在线调整αP。

其中ηP为正常数,在线调整αP的变化速度,一般取ηP=0.1;αP(0)=1,αP(t)∈(0,1)。
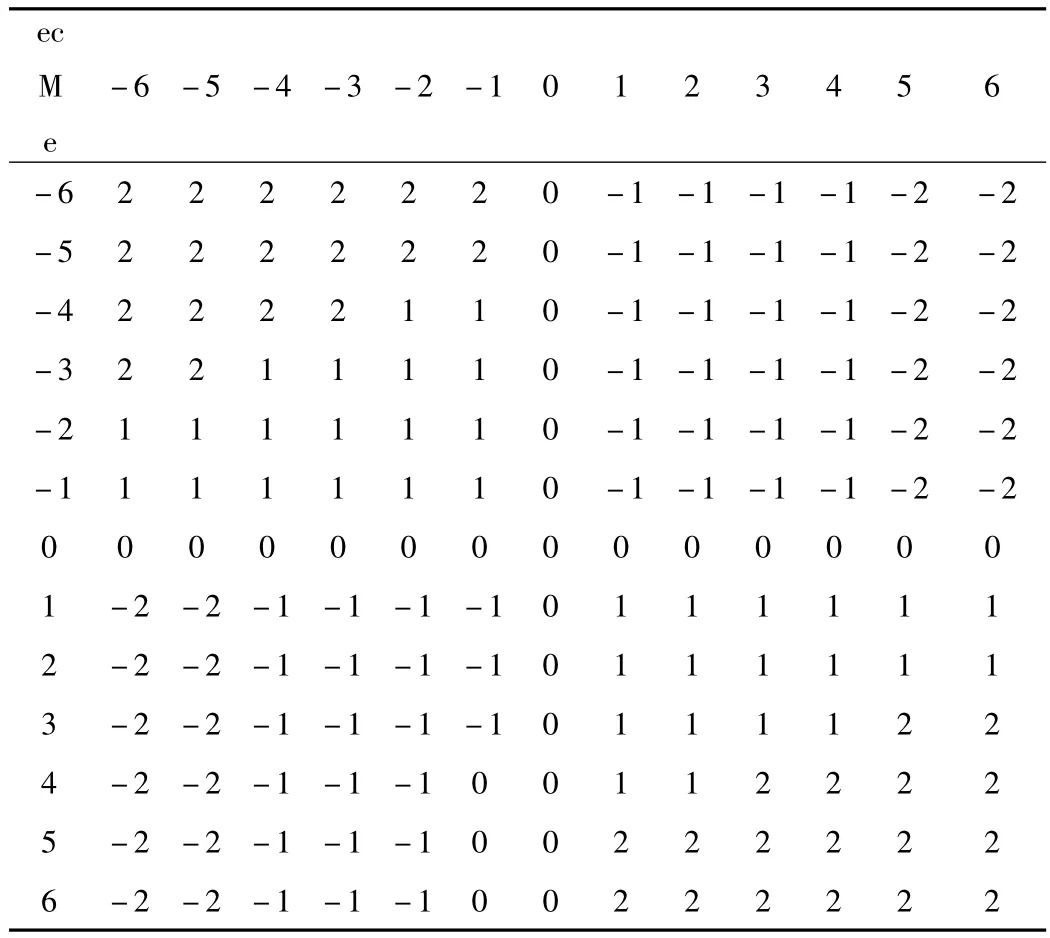
表1 解模糊化处理
3 电伺服独立变桨控制系统实验研究
7.5 kW电伺服独立变桨控制系统由PLC控制器、PMSM、伺服驱动器、备用电池系统、减速箱、滑环和电气总开关等组成,位置控制器采用基于模糊推理的自调整PID位置控制策略设计。在实际风机变桨时,桨距角给定为25(°),桨叶在45(°)和20(°)之间进行变桨动作,电伺服独立变桨驱动系统稳态实验结果如图3所示。
在整个运动过程中,变桨平稳、无超调、具有良好的位置跟踪性能和一致性,如图3(a)和(b)所示,开始变桨时,变桨电机转速能够迅速达到每分钟2 000转,对应于桨叶转速为7(°)/s,加速度为15(°)/s2;在快到达指定位置时,变桨电机转速迅速降为零;在恒速过程中,变桨电机转速保持稳定,无超调,如图3(c)所示。图3(d)为折算到电机侧的三个桨叶的实际扭矩,图3(e)为三个桨叶的变桨电机PMSM的电流,其变化规律与仿真规律相吻合,验证了电伺服控制策略以及控制器的正确性和有效性。总体上,电伺服独立变桨系统运行稳定、精确定位和快速跟踪,满足大型风机变桨所需的响应速度和伺服精度。
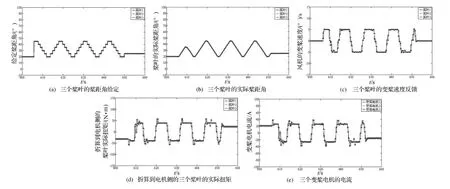
图3 桨距角给定、实际桨距角、变桨速度反馈、变桨电机扭矩和变桨电机波形曲线图
4 结束语
本文针对大型风力机的桨叶,首先理论分析并计算了2 MW风机的桨叶变桨距载荷,确定电伺服执行机构所需的驱动力矩,为伺服电机选型提供理论依据;然后针对桨叶负荷以及变桨控制系统对位置控制器的特殊需求,采用一种将模糊控制与传统PID相结合的模糊-PID控制设计位置控制器,并通过搭建的电伺服独立变桨控制系统硬件平台,实验结果不仅验证了变桨系统能够满足高性能伺服系统的精确桨叶位置和快速动态响应等性能要求,而且验证了伺服控制策略的正确性,证明所设计的电伺服驱动控制系统能够满足大型风机独立变桨的需求,为电伺服独立变桨控制系统在实际风力发电机组上的广泛应用奠定了技术基础,对发展独立变桨控制系统的国产化有着重要的现实意义。
[1]TONY B,DAVID S,NICK J,et al.Wind energy handbook[M].New-York:John Wiley& Sons Ltd,2005:475-486.
[2]HAU E. Wind turbinesfundamentals, technologies, application,economics[M].Berlin Heidelberg:Springer Verlag,2006:81-89.
[3]BUTKIEWICZ B S,System with hybrid fuzzy-conventional PID controller[A].IEEE ICS[C],2000(5):3705-3709.
[4]逢海萍,刘成菊.永磁同步电机交流伺服系统的滑模模糊控制[J].电机与控制学报,2006,10(6):576-579.
[5]西佳军,孙斌,赵化启.永磁同步电机单神经元自适应PD控制[J].电力自动化设备,2003,23(10):59-61.
[6]YAO XING-JIA,ZHANG ZHONG-CONG,ZHANG CHUN-MING.The study of adaptive independence electrical drive blade pitch control technology[A].Proceeding of International Conference on Electrical Machines and Systems[C],2007:828-833.
[7]K ALVARO,R RAMON,LIU H.Multivariable adaptive control using high-frequency gain matrix factorization[J].IEEE Trans.Automation Control,2004,49(7):1152-1157.
[8]窦真兰,程孟增,蔡旭,等.大型风机变桨距控制系统的研究[J].电机与控制应用,2011,38(3):38-44.
[9]窦真兰,王晗,凌志斌,等.电动变桨距控制系统设计与实现[J].电力电子技术,2011,45(7):1-4.
[10]石万凯,任丽蓉.兆瓦级风力发电机电动变桨距系统仿真[J].重庆工学院学报:自然科学,2009,23(4):137-141.
猜你喜欢
动力工程学报(2022年10期)2022-10-19
电力科学与工程(2022年9期)2022-10-10
电力建设(2022年7期)2022-07-04
哈尔滨轴承(2020年3期)2021-01-26
通信电源技术(2020年17期)2020-12-28
东方汽轮机(2020年3期)2020-11-04
哈尔滨轴承(2020年1期)2020-11-03
固体火箭技术(2018年6期)2019-01-18
测控技术(2018年2期)2018-12-09
通信电源技术(2016年1期)2016-04-16
