
教学机房通风系统的模糊控制方法研究
2015-12-06 06:30毛慧凤
长春工程学院学报(自然科学版) 2015年1期
毛慧凤
(长春工程学院理学院,长春130012)
0 引言
教学机房在大学教学中起着重要的作用,不仅有助于提高学生的计算机动手能力,而且能够带动与计算机相关的多种学科的发展。计算机在使用过程中会产生很多热量,上机人员多会感到空气很闷(CO2百分比浓度过高),这种环境不仅降低了机房设备的寿命,同时也会明显降低学生的学习效率。为了保持机房内温度,多采用空调制冷与强制通风辅助结合的方式,通过管理员手动开启制冷和通风系统来调节室内温度和实现室内换气。但是受机房管理员习惯的影响,存在过度使用空调系统和通风系统导致的能源浪费,或不使用空调和通风系统导致机房内温度高的情况。为了保证室内温度和空气质量,并最大程度地降低能耗,有必要使用更为智能的控制系统。
本文所研制的智能通风系统充分利用了室外的自然条件,通过对室外的温度、风速与室内温度、风速的比较,利用模糊控制方法提出一种空调和通风系统改造方案,研发的系统不仅适用于教学机房的温控系统,同时适用于多种场合,比如商场、超市、酒店等人员密集的区域,本系统具备投资小、实施难度低的特点。
本控制系统由计算机监控管理平台(人机交互单元)、控制单元(PWM、D/A控制)和输入输出单元三级拓扑结构组成,系统控制模型如图1所示。
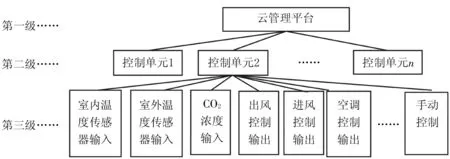
图1 拓扑结构图
其中第一级为“云管理平台”,用于多控制节点的集中、远程管理;第二级为“控制单元”,由可编程逻辑控制单元构成,具备智能控制功能;第三级为执行层,传感器输入、风机电机、空调、手动控制等设备。根据第三级设备的不同,第二级和第三级的通讯通过RS485或者网口通讯,实现集中、本地或异地管理,“三级设备”在整个拓扑结构图中属于被动器件,市场上均有成熟产品。第一级的“云管理平台”为组态软件为平台开发的管理平台,实现现场状态的直观显示、远程控制、应急处置,完成系统的记录、操作、监控、报警和数据报表生成等功能。第二级的“控制单元”为本控制系统的研发重点,侧重“控制单元”智能的控制算法,可以独立于“云管理平台”,判断采集信号的特征,根据模糊控制模型,产生对应的控制输出。由于本系统的传感器输入量较多、控制输出也较多,很难在一个模糊控制模型中解决,因此本系统采用分段实施多输入单输出的控制模型,以温度差ΔT(室内温度—室外温度)和CO2质量分数M的值为分段检测量,见表1所示。

表1 温内外温差与CO2对应表
模糊控制模型A:控制模型以温度差值ΔT(室内实际温度和设定温度)为输入,以空调制冷效率为输出的单输入单输出模糊控制模型。此模型较为简单,可由专家库直接映射为空调控制输出的控制模型,本文不给予详细阐述。
模糊控制模型B:控制模型以温度差值ΔT(室内实际温度和设定温度)和CO2质量分数为输入,以风机的风量为控制输出,构成两输入模糊控制模型。
1 模糊输入项的选定
本系统要解决室内温度高和空气闷的问题。因此要选择温度差和CO2质量分数。理由如下:
1)人的最舒适环境温度范围为18~23℃,也是计算机最佳工作温度范围,因此环境温度是非常直观的输入量,该温度值可采用多点采样,然后再取平均值作为模糊输入项。
2)室内空气闷,既可以用O2质量分数也可以用CO2质量分数来衡量,考虑O2质量分数传感器价格因素,本系统选择CO2质量分数作为模糊输入量。
2 模糊控制方法
本系统的模糊控制实现是通过检测环境温度和CO2质量分数作为模糊输入,经由模糊控制器变成控制风机的输出,构成双输入单输出的控制系统模型,如图2所示。
其中:G1、G2是CO2质量分数(μg·kg-1)和温度(摄氏度)的量化因子,G3是控制量Y的比例因子。根据模糊控制理论,分别对CO2质量分数(简写为N)、温度(简写为T)进行模糊化,各量的模糊划分方法如下:
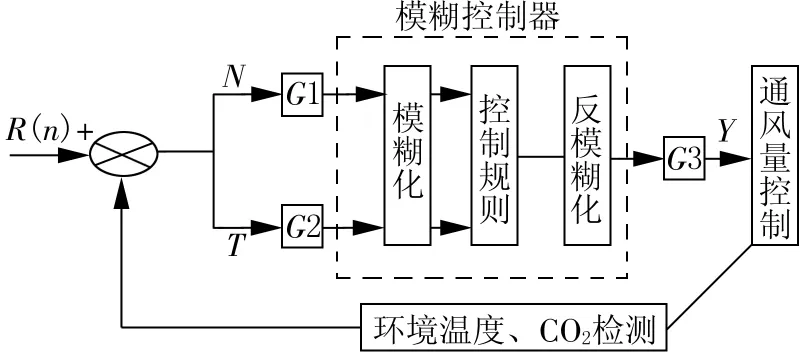
图2 实验室通风模糊控制系统模型
将输入量T分为5个模糊状态:VS(非常小)、S(小)、M(中)、L(大)、VL(非常大);对应的模糊化论域为温度值,其值:18、19、20、21、22、23、24、25、26。由于评价的是人所处的环境,因此温度的模糊化论域范围在18~26℃之间。
将输入量N分为5个模糊状态:VS(非常小)、S(小)、M(中)、L(大)、VL(非常大);对应的模糊化论域为 CO2质量分数值,其值:350、500、750、900、1 250、1 550、2 000、2 500、3 000、4 000、5 000,CO2质量分数为350~1 000μg/kg表示空气清新,呼吸顺畅;为1 000~2 000μg/kg表示感觉空气浑浊,并开始觉得昏昏欲睡;为2 000~5 000μg/kg表示感觉头痛、嗜睡、呆滞、注意力无法集中、心跳加速、轻度恶心;大于5 000μg/kg表示可能导致严重缺氧,造成永久性脑损伤、昏迷、甚至死亡。
将输出量Oi分成5个模糊状态:VS(非常小)、S(小)、M(中)、L(大)、VL(非常大);对应的模糊化论域为排风系统负荷百分比(风量控制可以通过PWM控制、电压控制、开闭时间、变频等多种形式),其值为:0.1、0.2、0.3、0.4、0.5、0.6、0.7、0.8、0.9、1,也可以根据具体要求进行更细致的划分。
控制规则表的制定,可以更好地控制排风量以适应实验室的通风要求,根据实践经验制定的规则表,见表2。
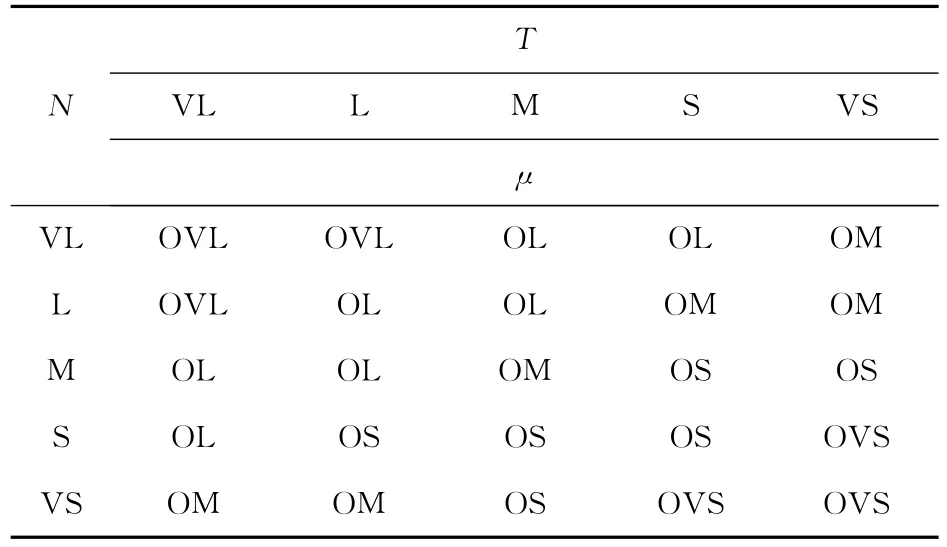
表2 规则控制表
上述规则控制表的原则是当温度很高、CO2质量分数很大的时候,增大排风风量;当温度很低、CO2质量分数很小时,减少排风风量。
应用Mamdani的强度转移法推理求出模糊量C′:对 于 Ri 而 言,μCi′ = min(μAi(x),μBi(y),μCi),以上控制表存在25种控制规则,有:C=max(C1′,C2′,……,C25′),其中Ai、Bi表示输入的CO2质量分数和温度模糊量,Ci是利用Ai、Bi查规则控制表得到的输出模糊量;μAi(x),μBi(y),μCi分别是Ai(x),Bi(y),Ci的隶属度。
用重心法将模糊量C精确化得到C*:

其中Ui为模糊论域中的模糊集合,根据Mamdani的强度转移法和重心法规则,对2组输入量的模糊论域按照此规则进行处理,得到模糊控制表,见表3。
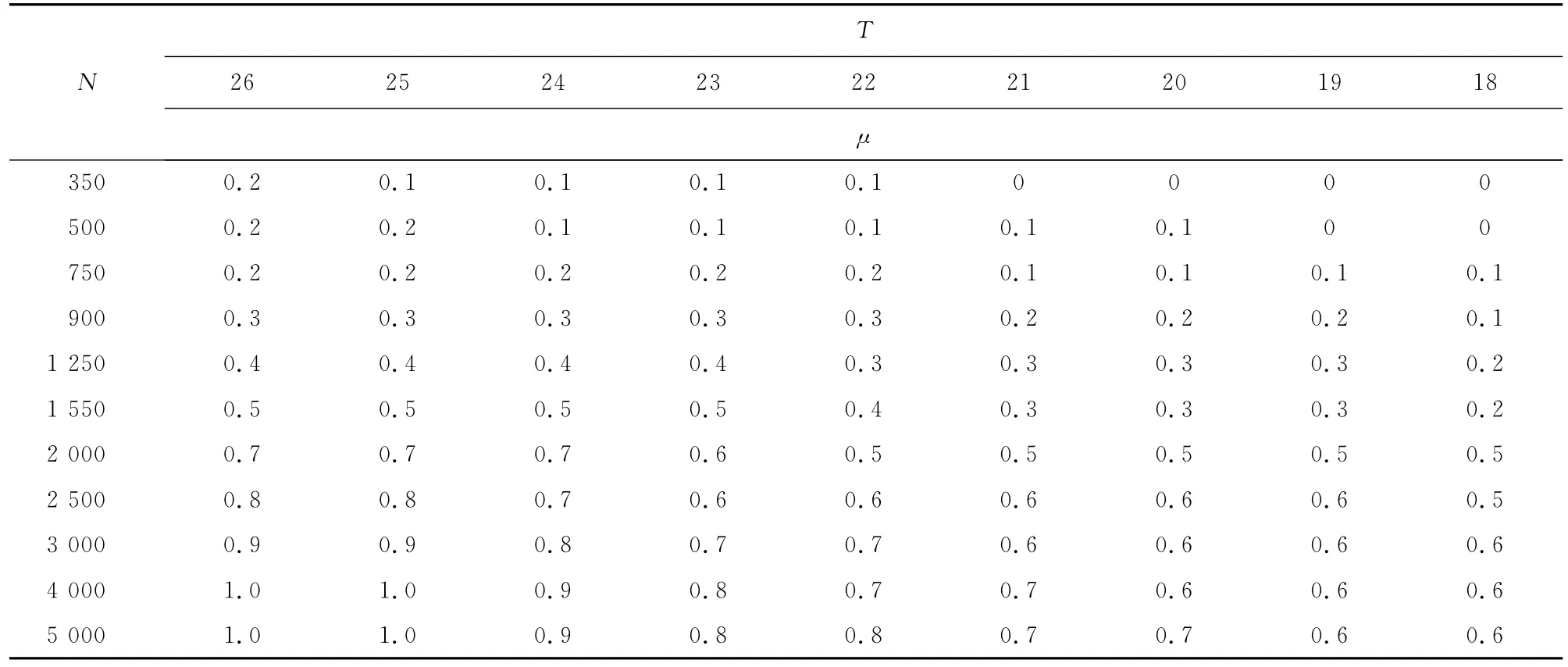
表3 模糊控制表
教学机房通风系统的模糊控制就是利用这张表,在实现模糊控制器时,把控制表存入ROM中,将控制器进行模糊控制的算法归结为查表运算。每次根据输入量的不同组合进行查表求出控制量的大小。
3 教学机房通风系统的系统结构
教学机房通风控制系统采用西门子S7-200系列中的CPU 224可编程控制器,该控制器具备24个数字量I/O点(最大扩展至168路),256个定时器,16k字节程序和数据存储空间,6个独立的30kHz高速计数器,2路独立的20kHz高速脉冲输出,具有PID控制器,可连接7个扩展模块,是具有较强控制能力和扩展能力的控制器。
CPU224搭配模拟量扩展模块(EM235)和温度采集模块(EM231)可充分应对本系统的控制。人机交互界面上采用工控机AK070W,基于组态软件快速开发,可形成界面友好、稳定的完整自动控制系统。系统结构如图3所示。
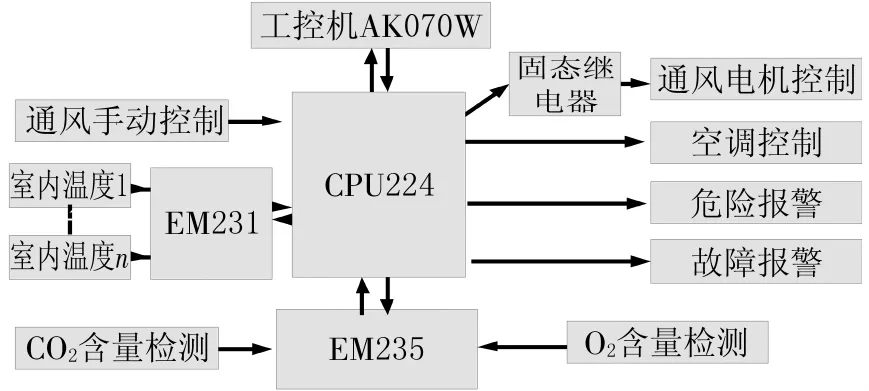
图3 系统结构图
在系统实现上兼顾了模糊控制的需求,同时也增加了冗余备份机制,如“通风手动控制”开关可以手动开启“教学机房”满功率通风;除了必备的传感器信息之外,还采集了O2含量;在CPU224输出上,除了“通风电机”控制,还增加了“危险报警”“故障报警”等。硬件系统为差异化定制提供了丰富的资源。
4 软件控制流程图
CPU224的流程采用模块化设计,包括主程序(图4)和中断程序(图5),其中主程序执行模糊查表,执行通风控制,在“教学机房”风险较高时,不允许进入“教学机房”内。中断程序主要进行时间管理和传感器信息采集,尽可能短的占用系统时间。
工控触摸屏AK070W主要负责用户权限管理和实验过程信息显示,不在这里详细描述。
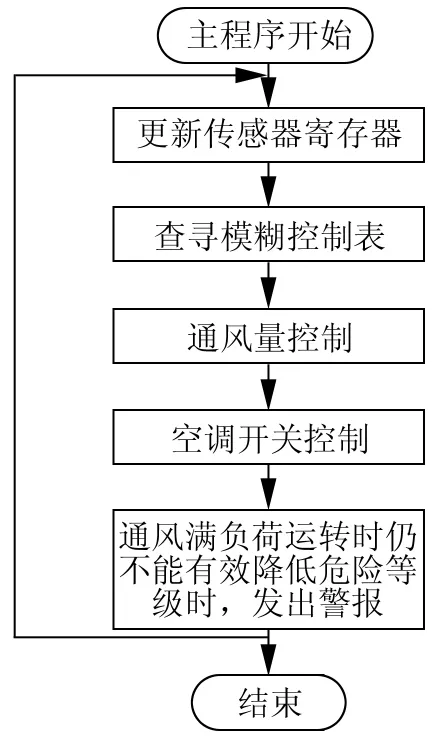
图4 CPU224主程序
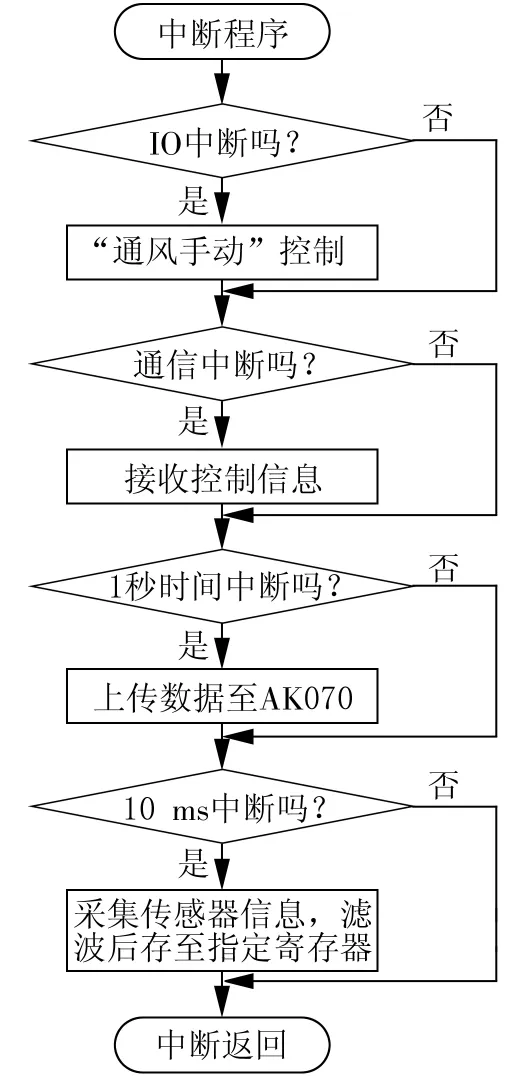
图5 CPU224中断程序
5 运行结果
本系统已成功应用于教学机房,机房使用面积200m2,空调装机功率为32kW,年用电节约52 992kW·h,室内空气指标一直处于优良状态(CO2的平均质量分数低于400μg/kg。教学机房的改造成本低于20 000元,年节省电费约37 000元。温度监控指标数据如图6所示,教学机房室内CO2含量监控数据如图7所示。

图6 2013年5月至2014年5月长春地区室内外温度图

图7 2014年5月教学机房内CO2含量
6 结语
本文针对教学机房通风系统目前存在的耗能高的缺点,利用双输入单输出的模糊控制模型检测环境中CO2质量分数和温度的实时变化状态完成了输入量及输出量的模糊化,设计出精确的控制表,取得了非常好的效果。实践证明,采用模糊控制方式的通风系统更节能,环境更舒适,具备将此方法推广至其他领域的前景。
[1]毛慧凤.电风扇的环境可靠性设计及实现[J].环境技术,2014(3):43-46.
[2]孟岩,张艳峰.模糊控制及其在工业设备上的应用[J].机械工程与自动化,2014(1):223-224.
[3]刘培奇.一种基于双精度搜索算法的变论域模糊控制[J].计算机工程与应用,2014(2):12-17.
[4]张慧.MATLAB与PLC相结合的模糊控制系统在加热炉温度控制中的应用[J].辽宁化工,2014,43(6):757-759.
[5]史震,马文桥,张玉林,等.复合控制导弹的模糊控制算法及实现[J].哈尔滨工程大学学报,2014,35(2):195-201.
猜你喜欢
商品与质量(2020年38期)2020-11-06
工程建设与设计(2020年2期)2020-03-30
中国保健营养(2019年1期)2019-10-21
西南交通大学学报(2016年3期)2016-06-15
电子制作(2016年21期)2016-05-17
通信电源技术(2016年6期)2016-04-20
通信电源技术(2016年5期)2016-03-22
工程建设与设计(2016年1期)2016-02-27
西北工业大学学报(2015年1期)2016-01-19
西部广播电视(2015年10期)2016-01-18
