
一种低成本的车辆开门防撞预警系统
2015-12-06 07:50王陆林刘贵如
重庆理工大学学报(自然科学) 2015年12期
王陆林,刘贵如,王 海
(1.奇瑞汽车股份有限公司前瞻技术科学院,安徽芜湖 241006;2.安徽工程大学计算机与信息学院,安徽芜湖 241000)
当前,车辆安全越来越受到广大消费者的重视,其中主动安全技术在车辆安全方面发挥的作用越来越突出,不仅表现在对驾乘人员的保护方面,同时在对交通环境中的人和非机动车辆的保护方面也在加强。近年来,屡屡发生车辆开门时车门和后方接近的自行车、摩托车发生碰撞的事故,对自行车、摩托车驾驶员造成致命伤害,甚至死亡,其原因就是由于驾乘人员开门下车时不注意观测后方车况,也未分段打开车门,提醒后方接近车辆注意避让,而是任性开门导致车门和后方来车发生碰撞。开门警示系统正是为了避免该类事故发生而开发的一项主动安全技术。目前整车配置开门警示系统的车型还比较少。在国内以及一些不发达国家,交通状况差,大量非机动车缺乏严格管理,在机动车道上任意穿行,很容易导致非机动车和打开的车门发生碰撞的事故。要有效降低由于开车门引发的交通事故概率,依靠改善交通状况和规范驾乘人员开车门的习惯,在现实中很难在短时间内取得成效,最有效的方式是在车辆上加装车辆开门预警系统,在驾乘人员打开车门之前对其进行有效提醒,使其注意观测后方车况,并分段打开车门,从而有效避免此类交通事故的发生。
目前车辆开门预警技术主要采用2种方式实现:一种是采用摄像头通过视觉实现车辆后方区域探测,这种方式探测距离有限,精度差,容易受各种环境因素影响,采用这种技术的开门预警系统目前比较少;另外一种是采用调频连续波毫米波雷达技术,该技术探测距离远、精度高,不受环境因素的影响,但控制系统设计复杂,成本高,采用这种技术的开门预警系统目前市场上还没有批量配置于整车。
针对开门预警技术潜在的市场需求和现有实现方式存在的缺点和不足,本研究采用低成本的多普勒雷达对后方区域接近目标进行探测,实现开门预警功能。系统设计简单,性价比高,能满足车辆开门预警实际场景和用户需求,对辅助驾乘人员安全开门,降低开门风险有较大帮助。
1 系统总体设计
系统包括控制单元、发动机点火开关、车速传感器、车门门锁状态开关、车门开关信号、多普勒雷达探测模块、车内提醒装置和车外提醒装置等。系统结构见图1。
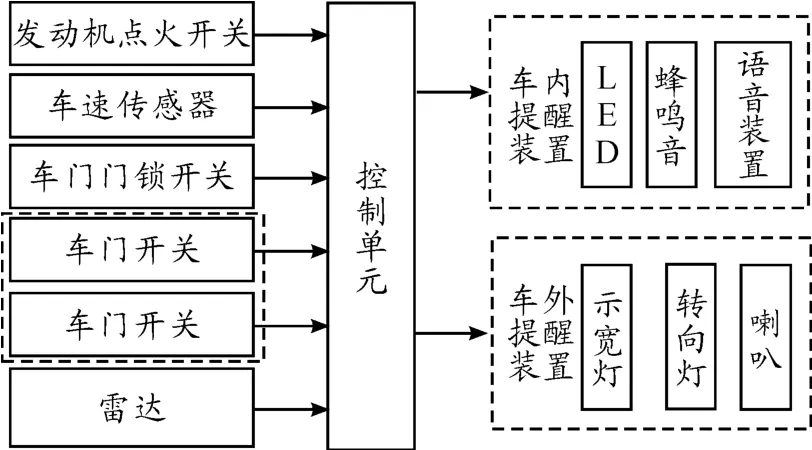
图1 系统结构
在选择双雷达方案后,用户可以根据需求灵活选择配置。系统控制器安装在车尾左/右后保险杠内侧,以及在车辆后轴平行安装,垂直安装仰角为2°~2.5°。系统LED提醒装置安装在车内门把手位置,蜂鸣器安装在仪表台左侧。系统利用多普勒雷达所具有的多普勒效应原理对运动目标进行探测,当发射源和接收者之间有相对径向运动时接收到的信号频率将发生变化[1]。
针对一般靠最右车道以及车道最右侧停车的场景需求,可以选择单雷达方案,安装在车辆后保险杠左侧内,成本更低。整车布置见图2所示。
当车辆减速停止,且车门门锁处于允许开启状态时,系统报警功能开启。当车门未打开时,如果有运动目标接近并进入后方报警区域,系统首先通过LED报警灯进行一级视觉报警。如果此时驾乘人员欲开启车门准备下车,当拨动门把手触发车门开关信号的瞬间,系统检测到车门打开状态,通过蜂鸣器鸣进行二级声觉报警,提醒驾乘人员此时开门可能有危险,需注意观测车辆后方车况,分段打开车门,在确保安全的情况下开门下车,从而避免碰撞事故的发生。
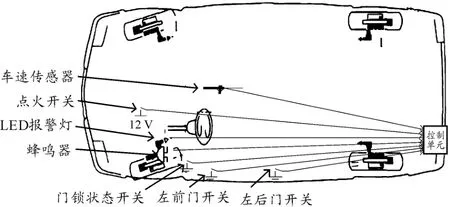
图2 单雷达方案的系统整车布置
2 系统硬件设计
2.1 多普勒雷达前端设计
本系统根据雷达方程和系统探测距离,设计了一种高灵敏度、低成本的多普勒雷达前端[2],其结构见图3。系统采用微带无源结构设计,方案简单,成本低。
图3中采用5 V供电给压控振荡器产生24 GHz的微波振荡信号,由功率分配器分为两路:一路经滤波器滤波后经平面微带发射天线发射出去;另一路提供给接收通道作为混频器本振源。接收天线接收回波信号并经过低噪放处理后,再经过功分器一分为二提供给2个混频器。混频器将回波信号与两路本振信号进行混频后输出2路相位相差 90°的中频信号[3]。
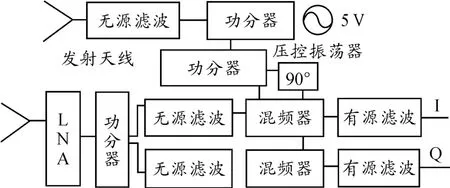
图3 雷达前端结构
2.2 系统后端硬件设计
在充分研究对比目前毫米波雷达系统后端硬件方案的基础上,针对系统需求设计了一种后端硬件方案,结构见图4。主要包括电源系统、车速信号采集电路、车门开关状态采集电路、CAN通信电路、多普勒雷达信号采集处理电路、多普勒毫米波雷达前端、视觉和声觉报警输出控制电路以及DSP最小系统电路。

图4 后端硬件结构
中频处理电路主要针对连续波毫米波雷达单个中频回波信号,采用带通滤波器进行滤波放大处理,然后采用DSP内置的ADC转换实现模数转换,并通过模数转换模块的DMA传输通道在不占用CPU运行周期的情况下将数字信号存储到DSP内置的SRAM存储器中供算法处理。与目前大部分的雷达系统采用的外置模数转换模块和SRAM存储器以及外加FPGA实现数据缓冲的方案相比,本方案不仅成本低,而且降低了系统设计复杂度,使得系统可靠性更高。
系统后端硬件方案设计主要考虑了两类参数:一是内置模数转换采样率、位数以及接口选择;二是内置SRAM大小。模数转换采样率需按照中频回波信号最高频率计算,并按照采样定理5~10倍进行采样,故采样率fadc=2.6 kHz×10=26 kHz。综合考虑系统需求和成本,选择内置模数转换模块采样率大于26 ksps即可满足需求。通信接口如果选择并行接口则通信速率大于26 kbps即可,如果选择串行通信接口则通信速度要大于26 kbps×16=416 kbps。ADC转换位数一般选择12位即可。参考电压采用内置参考电压或者外置高精度的参考电压。内置SRAM的大小则与模数转换通道个数、采样点数以及最高与最低频率倍数有关。系统采用2个模数转换采集通道,采样点数为1 024,最低频率为200 Hz,最高与最低频率倍数N=2.6 kHz/200 Hz≈14,故SRAM最小存储空间为2×1 024×14=28 k×16 bit=56 k字节。考虑中间变量和程序运行空间,选择内置64 k字节的 SRAM、主频大于120 MHz的DSP或者MCU即可满足系统需求。
3 系统软件设计
3.1 动态目标检测算法
在运动目标的检测过程中,为了获得较高的目标检测[4-7]概率,需要根据实时变化的背景噪声强度动态调整功率识别门限。常采用恒虚警检测方法[8-12],通过有限个参考单元来估计杂波干扰的平均功率。单元平均恒虚警(CA-CFAR)[13]在均匀的杂波环境下有较好的检测性能,但是在杂波边缘和有干扰目标的情况下检测性能会明显下降,而两侧单元平均选小和选大的检测方法[14]虽然在杂波边缘检测中有很高的检测性能,但是在有目标干扰的情况下,检测性能比CA-CFAR更差。基于排序的CFAR检测器[15]先进行排序,然后选择两侧最大或最小值,与两侧单元平均选小和选大的方法相比,可以提高在有目标干扰的情况下的检测性能,但未能充分利用CA-CFAR的优点。
实测应用场景为雷达处于静止状态,地平面相对于雷达静止,不产生多普勒效应,背景噪声分布比较均匀[7]。综合以上检测算法的优点,提出一种改进的CFAR检测算法,见图5。

图5 改进的CFAR算法
先对n个检测单元各自排序,然后选择最大、最小值取均值得到杂波平均功率T,再结合门限因子β,得到检测门限功率G,再将各个检测单元功率xm与门限功率G进行比较,当xm≥G时认为有目标,否则认为无目标。该算法在噪声、多目标干扰[7]和杂波边缘干扰的场景下均有很好的检测性能和鲁棒性。
3.2 系统控制算法
系统通过线束和整车进行信息交互。系统控制算法流程见图6。当系统上电运行后,实时检测车辆运行速度和门锁状态。当车速为0且门锁开启后,系统报警功能开启。如果此时有车速大于5 km/h的目标进入后方报警区域,系统首先通过车内门把手位置的LED灯对驾乘人员进行提醒,同时打开转向灯对后方接近车辆进行提醒。如果驾乘人员拨动了门把手准备打开车门,则系统通过蜂鸣器报警提醒驾乘人员要注意回头观测后方车况,分段打开车门,在确保安全的情况下开门下车。如果车辆处于熄火状态,且车门门锁处于关闭状态时,系统切断自身电源并关闭。
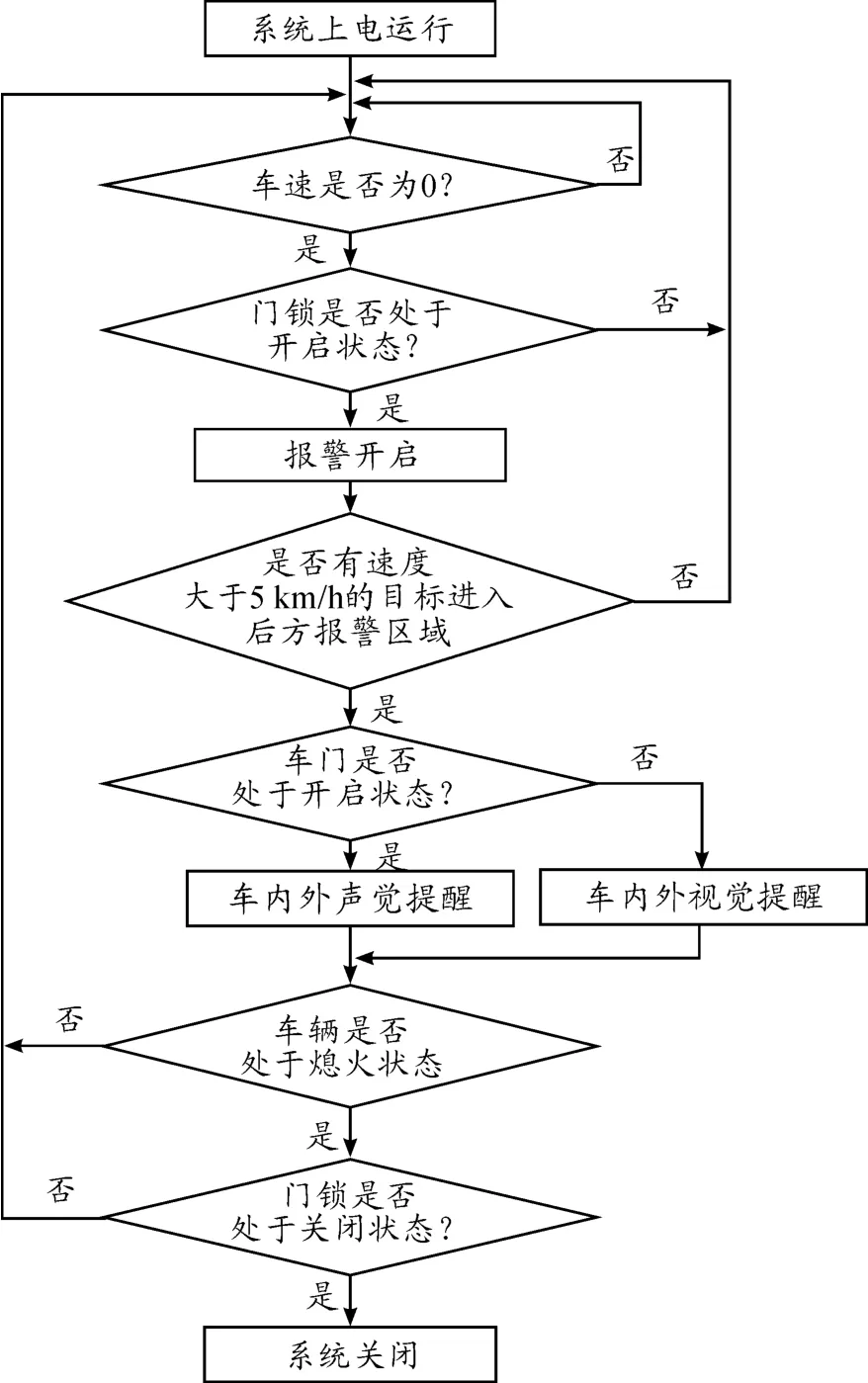
图6 系统控制算法流程
4 系统标定与测试
系统首先针对典型运动目标的雷达探测区域进行了标定和测试,在测试和标定数据的基础上结合实际应用场景标定和定义系统报警区域。系统除了考虑针对进入车辆后方左侧报警区域的目标进行报警外,还考虑到极端情况,即目标从正后方跟随本车,当本车静止后,后方目标从本车左侧变道突然进入本车左后方区域,此时也有发生碰撞事故的风险。另外,还存在车辆在行驶过程中可能突然偏离行驶车道等随机因素,所以系统除了定义常规的最小安全报警区域外,还定义了可能报警区域。最小报警区域保证系统能够对正常行驶并接近的目标进行报警,防止发生碰撞。可能报警区域则针对实际环境中可能存在的不确定因素或者极端情况采取报警。以后保险杠左侧安装雷达的位置为基点,针对自行车:横向向外和向内1.5 m,向后纵向10 m的区域为报警区域;横向向外和向内3 m,向后纵向20 m的区域为可能报警区域。针对摩托车:横向向外和向内横向1.5 m,向后纵向13 m的区域为报警区域;横向向外和向内3.5 m,向后纵向25 m的区域为可能报警区域。针对机动车:横向向外和向内2 m,向后纵向17 m的区域为报警区域;横向向外和向内4 m,向后纵向35 m的区域为可能报警区域。系统最小报警区域定义见图7。
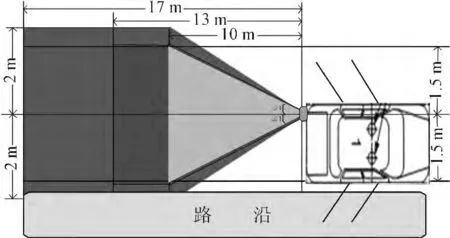
图7 系统最小报警区域定义
因为不同的接近目标反射面大小、最高限定车速、存在的风险等因素不同,根据系统运行时间、报警响应时间和最小探测区域,设定了3种典型目标的适用车速范围:自行车为0~35 km/h;摩托车为0~45 km/h;机动车为0~60 km/h。不同目标的横向和纵向探测距离以及适用车速范围之间的关系见表1。
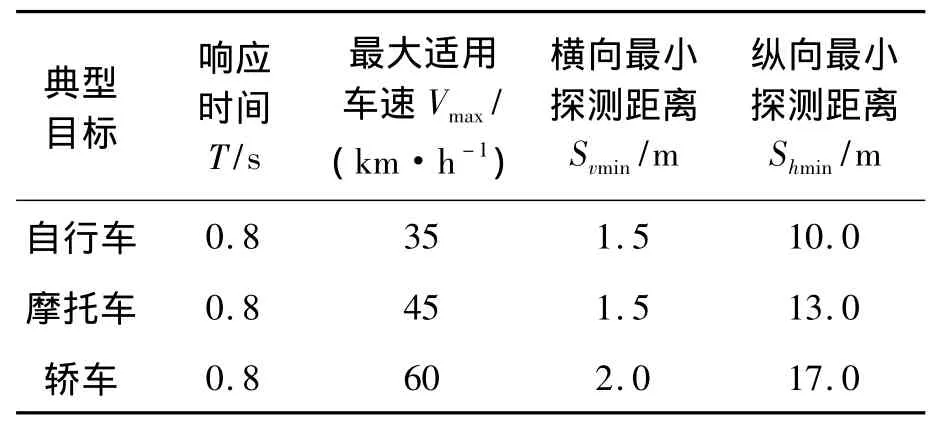
表1 不同目标的横向和纵向探测距离以及适用车速范围之间的关系
系统在奇瑞G5车上进行了标定和验证,针对各个典型目标标定的报警区域设定了若干测试点,测试场景见图8~10。
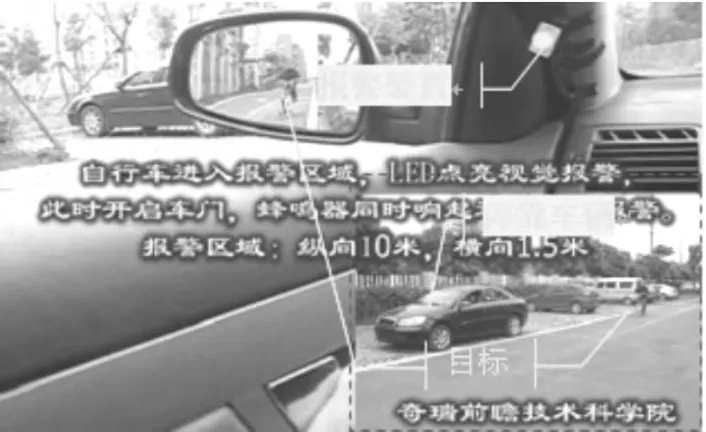
图8 针对接近目标为自行车的测试场景

图9 针对接近目标为摩托车的测试场景

图10 针对接近目标为轿车的测试场景
在图8、9和10中,框内及右图显示目标进入路边停靠的车辆后方报警区域,此时报警装置LED点亮报警,当驾乘人员拨动了门把手时,报警装置蜂鸣器报警。各个典型目标在各测试点的平均预警率:自行车在4,7 m测试点的平均预警率分别是97.20%,96.86%;摩托车在 4,8,13 m 测试点测试的平均预警率分别是97.10%,97.21%,96.78%;轿车在4,8,12和17 m测试点的平均预警率分别是97.50%,97.30%,96.70%,98.14%。各典型目标平均预警率见表2。
自行车测试405次,预警率为97.03%;摩托车测试603次,预警率为97.01%;轿车测试812次,预警率为97.41%。预警率均大于97.00%,测试结果满足系统指标需求。

表2 系统预警率测试结果
系统不受光线、雨、雾、雪、霜、颜色和温度等自然环境因素的影响,具有穿透力强、响应速度快、可靠性高、寿命长和成本低等优点。虽然目前开门预警技术还未大批量应用于量产车型,但该系统因其成本优势和实用性有着广阔的市场前景。
5 结束语
本文所开发的车辆开门预警系统在奇瑞车型上进行了集成测试与标定,系统运行稳定可靠,报警区域预警率大于97.00%,在现场体验中98.5%以上的用户表示系统非常实用、性价比高。本系统能够有效减少因驾乘者在视线受限或者忘记观测后方车况的情况下开门可能导致的碰撞事故的发生。
系统目前的报警方式比较单一,采用LED和外置蜂鸣器进行提醒。后续可以和整车通过CAN通信进行集成,通过仪表内置的蜂鸣器进行提醒或者通过车载多媒体终端进行语音提醒,满足客户更人性化的需求。
目前,系统只针对常规测试场景进行了测试,后续需要在特殊或者极端场景下进行测试,如在存在电磁干扰、不同雷达间的同频干扰等环境下进行测试,通过测试和算法改进提高预警率,降低虚警率。
[1]蔡征宇,陈文武,谢仁宏.提高多普勒雷达测速估计精度的方法[J].南京理工大学学报(自然科学版),2009(8):520-523.
[2]范林刚,陈泽宗,金燕,等.微波多普勒雷达海浪参数提取算法[J].华中科技大学学报(自然科学版),2012(10):21-24.
[3]贾立山,王立文.基于多普勒测距雷达的实时距离测量系统[J].交通运输工程学报,2011(2):51-57.
[4]雷志勇,文必洋.基于恒虚警的高频地波雷达低速目标检测研究[J].电波科学学报,2007(10):774-778.
[5]陈建军,黄孟俊,邱伟,等.海杂波下的双门限恒虚警目标检测新方法[J].电子学报,2011(9):2136-2141.
[6]BAHRAMPOUR S,RAY A,SARKAR S,et al.Performance comparison of feature extraction algorithms for target detection and classification[J].Pattern Recognition Letters,2013,34:2126-2134.
[7]HAO Chengpeng,ORLANDO D,FOGLIA G,et al.Persymmetric adaptive detection of distributed targets in partially-homogeneous environment[J].Digital Signal Processing,2014,24:42-51.
[8]陈建军,黄孟俊,赵宏钟,等.相参雷达时频域CFAR检测门限获取方法研究[J].电子学报,2013(8):1634-1638.
[9]GURAKAN B,CANDAN C,ÇILOGLU T.CFAR processing with switching exponential smoothers for nonhomogeneous environments[J].Digital Signal Processing,2012,22:407-416.
[10]MATA-MOYA D,del REY M N,Peláez-Sánchez V M,et al.MLP-CFAR for improving coherent radar detectors robustness in variable scenarios[J].Expert Systems with Applications,2015,42:4878-4891.
[11]WEINBERG G V.Management of interference in Pareto CFAR processes using adaptive test cell analysis[J].Signal Processin,2014,104:264-273.
[12]CHEN Jianjun,HUANG Mengjun,ZHAO Hongzhon g,et al.Research on Estimated Threshold of CFAR Detection in Time-Frequency Domain for Coherent Radar[J].ACTA ELECT RONICA SINIC A,2013(8):1634-1638.
[13]ZAIMBASHI A.An adaptive cell averaging-based CFAR detector for interfering targets and clutter-edge situations[J].Digital Signal Processing,2014,31:59-68.
[14]ZHANG Renli,SHENG Weixing,MA Xiaofeng,et al.Constant false alarm rate detector based on the maximal reference cell[J].Digital Signal Processing,2013,23:1974-1988.
[15]WEINBERG G V,KYPRIANOU R.Optimised binary integration with order statistic CFAR in Pareto distributed clutter[J].Digital Signal Processing,2015,42:50-60.
猜你喜欢
汽车实用技术(2022年19期)2022-10-19
汽车工程师(2021年12期)2022-01-17
今日农业(2019年12期)2019-08-13
铁道通信信号(2018年5期)2018-06-28
现代园艺(2017年22期)2018-01-19
汽车维护与修理(2016年10期)2016-07-10
火控雷达技术(2016年3期)2016-02-06
小学生·多元智能大王(2015年3期)2015-05-25
汽车维修与保养(2015年2期)2015-04-17
汽车维护与修理(2015年6期)2015-02-28
