
在轨服务飞行器对共面圆轨道目标接近过程分析
2015-12-05 05:11姚静波辛朝军苏宪程
航天控制 2015年4期
李 岩 姚静波 辛朝军 苏宪程
1.装备学院航天装备系,北京101416
2.装备学院训练部,北京101416
在轨服务飞行器(On-Orbit Service Vehicle,OSV)与目标航天器的互相接近是实施在轨服务的必要前提,合理选择接近过程中的机动策略能保证2个航天器高效、安全、可靠地实现轨道交会和相互联接。
文献[1]针对航天器大范围轨道交会,关注能耗因素,提出了二冲量燃料最省机动方案的数值寻优算法。文献[2]考虑2个航天器距离及飞行时间等因素,研究了非开普勒轨道上追踪卫星的交会变轨决策问题,提出解决该问题的近似求解方法。文献[3]提出了一种半解析的快速设计算法,设计了连续小推力发动机实现的调相机动。可见,追踪航天器(OSV)和目标航天器的轨道高度、相对位置,机动过程方式、时间和能耗等因素都是研究大范围轨道机动设计的关键环节。文献[1 -3]从各自关注的重点出发提出了有效解决问题的方法和思路,但在机动策略的选择,以及综合分析诸多因素的相互影响等方面考虑得还不够全面。本文将逐步分析时间、相位调整、能耗和轨道配置等两航天器接近过程中的多种因素及其相互影响,提出更加全面的轨道机动策略选择依据。
1 轨道转移相位分析
同轨道交会过程相似,OSV 首先实施大范围、远距离的轨道机动,沿霍曼椭圆过渡轨道运行至比目标轨道低数十公里(30 ~50 km)的圆形停泊轨道,为实施下一步自主导引接近提供条件[4-5]。在此过程中,OSV 的轨道机动等效为两共面圆轨道间的轨道转移问题。
为了节省OSV 的能耗,变轨过程采用霍曼转移方式。在变轨发动机点火前,OSV 需要完成轨道相位的调整,使2个航天器的地心角之差满足霍曼转移的相位差θH,即满足交会窗口条件,保证2个航天器在指定的时刻和位置相互接近。
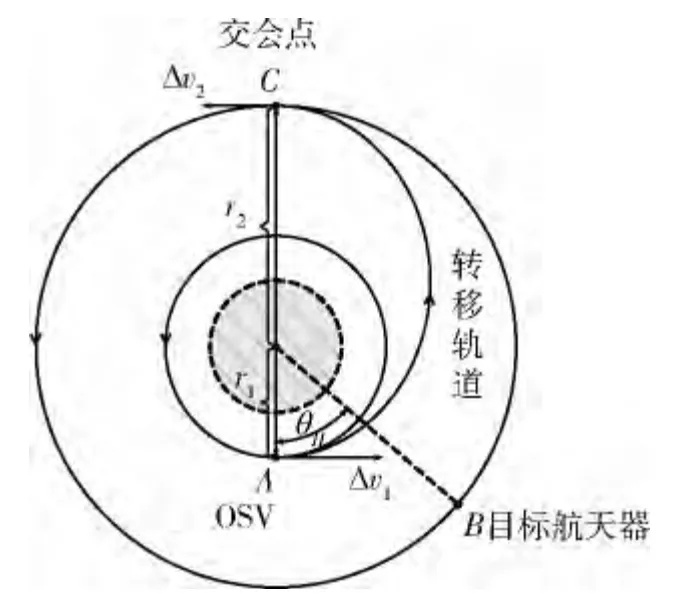
图1 霍曼转移轨道示意
由图1 中的位置关系可以得到:

得到霍曼转移相位差:

式中,TH和T2分别为霍曼转移轨道周期和目标航天器轨道周期;r1和r2分别为OSV 待机轨道半径和目标轨道半径。
由于目前在轨服务活动主要在地球同步轨道以内的空间实施,所以r1最小可近似取地球半径6378.14km,r2最大可取同步轨道半径42164. 17 km,即0.1512 <(r1/r2)<1 。图2 中给出了相应的霍曼转移所需相位差与r1/r2的关系,可见0° <θH<110° 。在近地轨道范围(200 km ~2000 km),0.7 <(r1/r2)<1 ,则0° <θH<40° 。
2 轨道转移前的相位调整过程
如果初始时刻目标航天器和OSV 之间的轨道相位差不是θH,而是θH+Δθ(0 ≤Δθ <2π),就不能立即执行霍曼转移(如图3)。否则当OSV 达到交会点时,目标航天器与交会点之间将有一个角度差Δθ。
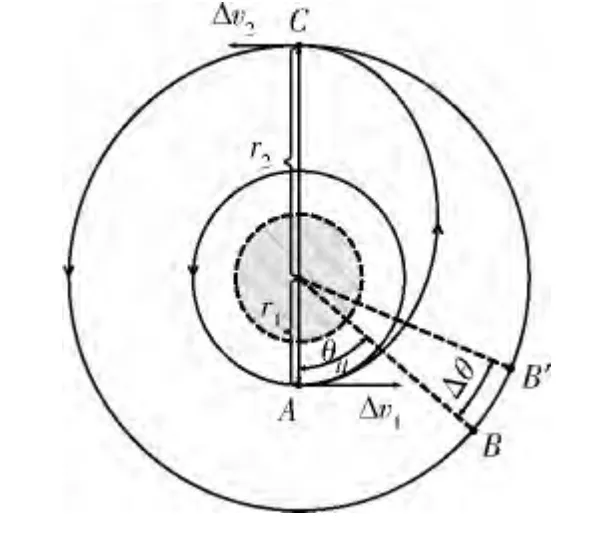
图3 轨道相位不满足霍曼转移相位示意
由于内圆轨道的角速度ω1大于外圆轨道的角速度ω2,所以,角度差可以通过自然调相消除[6]。设调节时间为tω,则:

交会总时间t 是霍曼转移时间tH和等待时间tω之和:

当然轨道相位的调整也可以采用速度调相的方法(如图4)。在共轨速度调相中,OSV 可以通过2次大小相等方向相反的速度增量,经与初始轨道相切的椭圆调相轨道,在预定时间内从原位置A 到达新的位置B。图4 中(a)和(b)分别是A 点超前和滞后于B 点时的调相轨道。
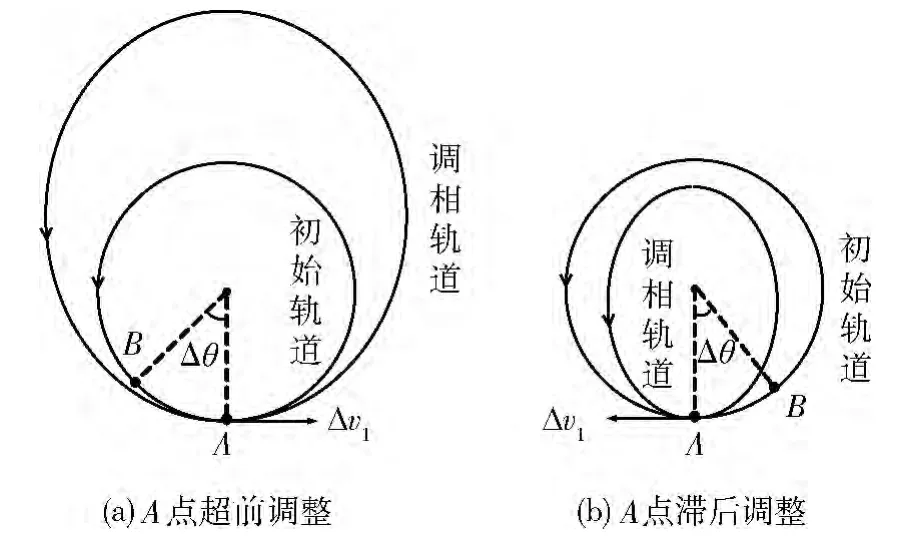
图4 共轨速度调相示意
设初始圆轨道半径为r,轨道周期为Tr,速度为vr。图4(a)中,在A 点向前进方向施加速度增量Δv1,进入调相椭圆轨道的近地点,设近地点速度为vp,调相轨道半长轴为a,周期为Ta,则有:

图4(b)中,在A 点向与前进方向相反的方向施加速度增量Δv1,进入调相椭圆轨道的远地点,设速度为va,调相轨道半长轴为a,周期为Ta,则:

此时,由于a ≥(re+r)/2,那么Δθ 有最大值,即:

相应的调相时间有最小值限制:

图5 给出了初始轨道高度在200 km ~2000km的低轨范围内变化时,共轨速度调相所需的速度增量和时间随相位差的变化曲线。图5(a)中,速度增量和调相时间均随相位差的增大而增大;速度增量随高度的增加而减小,调相时间则随高度的增加而增加。图5(b)中,不同的轨道高度对应不同的最大可调相位差,因此相位差的取值范围随高度增加而增加。在可调相位差的公共区域进行比较,如0° ~50°之间,速度增量随相位差的增加而增大,但调相时间则相反;速度增量随高度的增加而减小,调相时间随高度增加而增加。对比2个图可以看出,在近地轨道区域进行速度调相,超前或滞后相位差在0°~50°之间时,均可实现调相。在此区间内,速度增量需求随高度变化不明显,而且不大于0.5km/s。
为比较速度调相和自然调相的特点,以具体算例进行分析。设目标轨道为400km,OSV 待机轨道低于目标轨道,在100km ~400km 之间取值,相位差在超前或滞后0° ~50°之间变化,分析OSV 采取速度调相和自然调相所需时间的变化情况。
图6 给出了算例中速度调相时间随轨道高度的变化曲线,图6(a)中可以看出,超前调相时间大于待机轨道周期Tr,随着高度和相位差的增加而增加,且线性特点明显。图6(b)中滞后调相时,所需时间随相位差的增加而减小,也就是说,相位差越小,调相时间反而长。由于最大可调相位差的限制,在相位差增大到一定数值时,轨道高度低于170km 的待机轨道无法满足调相要求,变化曲线呈现非线性。在可调相位区间,调相时间小于待机轨道周期Tr。
图7 给出了算例中自然调相时间随轨道高度变化曲线,由于自然调相的单向性特点,OSV 超前相位差Δθ,等同于滞后360° - Δθ。可见调相时间随高度变化呈现非常明显的非线性。特别是在待机轨道高度与目标轨道高度相差较小时,调相时间随相位差的增加而急剧增加。但在轨道高度较低,滞后相位差较小的区域,变化呈近似线性,且调相时间无最小值限制。因此,增大轨道高度差,且使OSV 处于相位差较小的滞后状态,有利于减少自然调相时间。

图5 不同轨道高度,共轨调相速度增量和调相时间随相位差变化曲线族
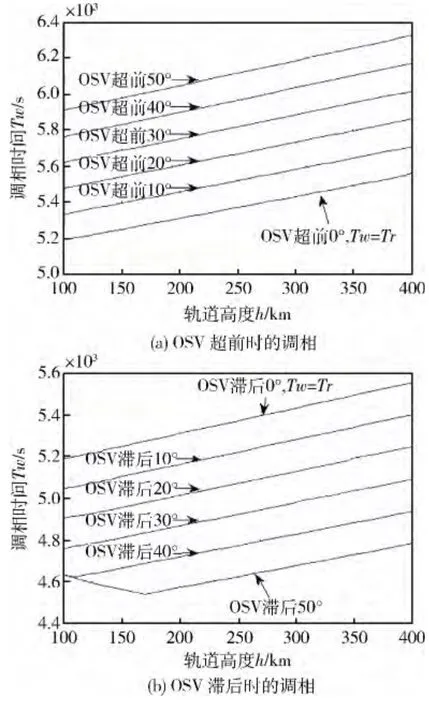
图6 相位差不同时,速度调相时间随待机轨道高度变化曲线族
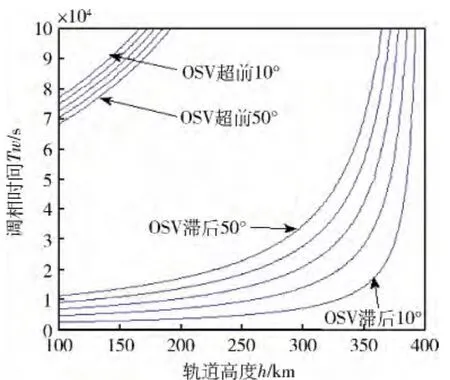
图7 相位差不同时,自然调相时间随待机轨道高度变化曲线族
表1 给出了自然调相和速度调相的特点对比。
由于OSV 机动能力有限,在执行交会对接任务时,为了减少OSV 的燃料消耗,尽可能采用自然调相的方法,待机轨道以及相位差的选择应适合自然调相的条件要求。

表1 自然调相和速度调相特点对比
3 轨道转移的速度增量
采用自然调相的前提下,轨道转移的速度增量即为霍曼转移所需的速度增量,为图1 中Δv1与Δv2之和[7-8]。设霍曼转移轨道近地点速度大小为vp,远地点速度大小为va,初始轨道速度大小为v1,目标轨道速度为v2,则

4 综合算例分析
设目标轨道高度h2为400km,轨道倾角51.65°。OSV 的待机轨道倾角和升交点位置应选择与目标轨道一致,以减少轨道平面机动带来的燃料消耗。轨道高度h1成为待机轨道选择的可变因素。
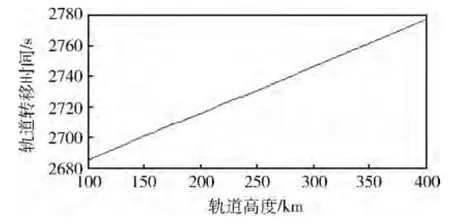
图8 OSV 初始轨道高度h1 与轨道转移时间tH 的关系
图8 给出了OSV 初始轨道高度h1从100km ~400km 区间变化时,轨道转移时间tH的变化趋势。轨道高度越高所需转移时间也相应增加,从节省时间角度应当选取较低的初始轨道。
图9 给出了OSV 初始轨道高度h1从100km 到400km 区间变化时,轨道转移所需的速度增量之和Δv 的变化趋势。轨道高度越高,Δv 越小,从减少在轨系统能量消耗的角度应选择轨道较高的初始轨道。
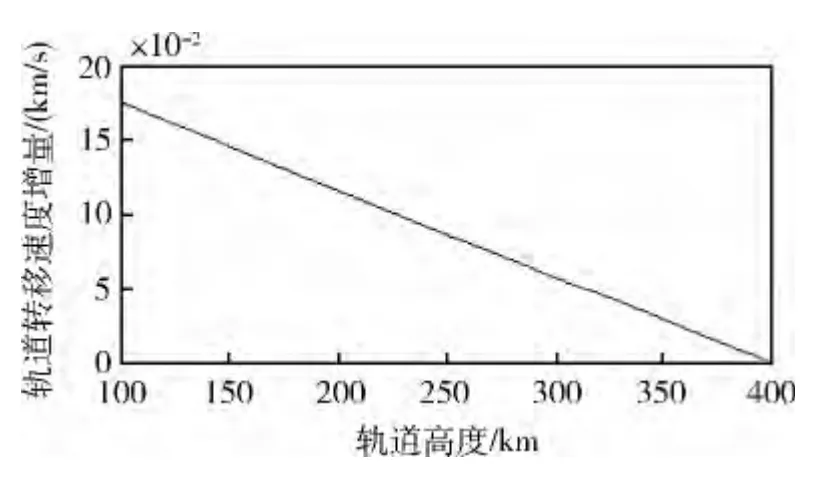
图9 OSV 初始轨道高度h1 与轨道转移总的速度增量Δv 之间的关系
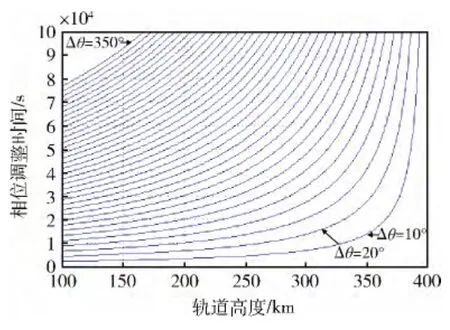
图10 初始相位差不同时,OSV 初始轨道高度h1调相所需时间tω 的关系
图10 和11 分别给出了OSV 初始轨道高度h1从100km 到400km 区间变化时,采用自然调相法,调整相位偏差Δθ 所需时间的变化趋势,以及轨道转移总时间的变化趋势。可以看出,在OSV 滞后相位差Δθ <10°,轨道高度h1<250km 的区域,调相时间随待机轨道高度变化比较平缓,呈近似线性。在此区域,尽可能减小OSV 的滞后相位差,能够缩短调相时间。
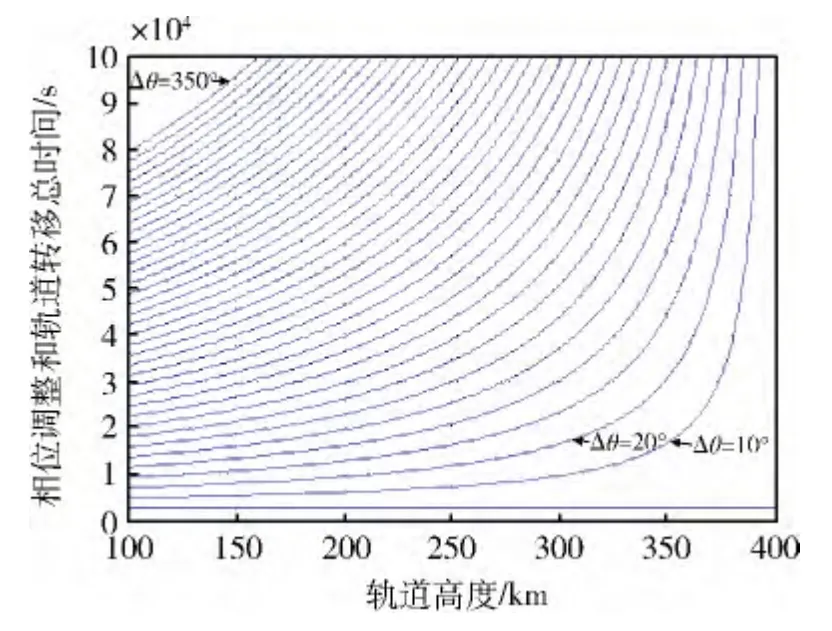
图11 初始相位差不同时,OSV 初始轨道高度h1 与调相和转移总时间tH + tω 的关系
从上述轨道高度与时间以及速度增量关系的分析可见,机动飞行器选择200 km ~250 km 的初始轨道,在减少燃料消耗和缩短机动时间方面取得了较好的效果。
5 结论
为节省OSV 燃料消耗,大范围轨道交会一般采用霍曼转移方式,针对具体任务合理选择待机轨道、停泊轨道、初始相位差、变轨时机和交会时间等参数:待机轨道平面与目标轨道平面一致,轨道高度需要留有一定的高度差用于相位调整;尽量采用自然调相的方式,OSV 初始相位应滞后于目标且角度较小为宜;调相到达霍曼转移相位差时为最佳变轨时机;在节省能量的前提下机动和调相总时间越小越好。
上述研究基于二体问题动力学模型,没有充分考虑轨道摄动等多种影响因素,此外还有较多需要进一步完善的方面,如:算例仅针对低轨目标,需要进一步充实;机动过程采用OSV 主动接近方式,还可考虑双主动接近策略;机动模型仅考虑较常用的双脉冲机动,需要深入分析对比如多脉冲机动、连续推力机动等其它机动方式等。
[1]丁濛,童若锋,董金祥. 大范围轨道机动的燃料消耗优化方法[J]. 航天控制,2008,26(6):47-53. (DING Meng,TONG Ruofeng,DONG Jinxiang. Optimization methods for fuel consumption in large-scale spacecraft orbit maneuver[J]. Aerospace Control,2008,26(6):47-53.)
[2]张拓,高晓光,樊昊. 非开普勒轨道下卫星交会变轨决策 研 究[J]. 航 天 控 制,2012,30 (2):51-56.(ZHANG Tuo,GAO Xiaoguang,FAN Hao. The study on decision-making of the maneuver in satellite orbits based on non-Keplerian[J]. Aerospace Control,2012,30(2):51-56.)
[3]王帅,尚海滨,崔平远,黄翔宇.小推力地球卫星圆轨道同轨调相设计方法研究[J]. 宇航学报,2013,34(1):1-8. (WANG Shuai,SHANG Haibin,CUI Pingyuan,HUANG Xiangyu. Study on design method of low-thrust phasing maneuvers for earth circle-orbit satellites[J]. Journal of Astronautics,2013,34(1):1-8.)
[4]李岩,蔡远文.多目标群的在轨服务飞行器部署策略[J].哈尔滨工程大学学报,2012,33(4):459-463.(LI Yan,CAI Yuanwen. The deployment of orbital servicing vehicles for multi-targets[J]. Journal of Harbin Engineering University,2012,33(4):459-463.)
[5]王佳,于小红.轨道机动作战中的待机轨道研究[J].航天控制,2005,23(5):17 ~22. (WANG Jia,YU Xiaohong. Research on parking-orbit in orbit maneuvering operation[J]. Areospace Control,2005,23 (5):17-22.)
[6]朱仁璋.航天器交会对接技术[M]. 北京:国防工业出版社,2007.
[7]敬忠良,袁建平,罗建军,等.航天器自主操作的测量与控制[M].北京:中国宇航出版社,2011.
[8]刘暾,赵钧.空间飞行器动力学[M].哈尔滨:哈尔滨工业大学出版社,2003.
猜你喜欢
资源节约与环保(2022年8期)2022-09-20
公民与法治(2022年6期)2022-07-26
哈哈画报(2022年5期)2022-07-11
装备制造技术(2020年3期)2020-12-25
大众文艺(2020年8期)2020-04-21
当代陕西(2019年12期)2019-07-12
当代水产(2019年1期)2019-05-16
汉语世界(The World of Chinese)(2019年1期)2019-03-18
太空探索(2016年9期)2016-07-12
创业家(2015年1期)2015-02-27
