
支持向量机网络在船舶电力推进系统状态评估中的研究
2015-12-04 07:06朱永祥孔祥海
舰船科学技术 2015年1期
朱永祥,孔祥海
(南通航运职业技术学院,江苏 南通226010)
0 引 言
随着船舶技术以及电力技术的迅猛发展,船舶推进系统近年来得到了快速发展[1-3],特别是电力推进系统因其具有环保、节能等优势,成为船舶推进系统中重要的发展方向。船舶电力推进系统由多种设备组成,并且结构复杂,多种设备在运行中相互关联和影响,为了保证电力推进系统的安全性和高效性,需对整个电力推进系统进行安全状态评估,提前发现问题并维修,保持整个电力推进系统的安全性[4]。状态评估主要包括状态评估体系的建立和状态评估理论方法的研究两方面内容,对于状态评估的理论方法,近年来主要有基于模型的评估方法、基于信号的评估方法以及基于知识的智能评估方法[5]。
本文在分析各种状态理论方法优缺点的基础上,采用基于知识的智能评估方法中的支持向量机状态评估专家系统。建立电力推进系统状态评估流程与电力推进系统支持向量机状态评估模型。支持向量机[6]是Cortes和Vapnik 在1995年提出的,也是状态评估的一种有效方法,并对小样本数据处理具有较强的能力。
1 状态评估理论方法概述
由于状态评估过程是一个复杂、多学科交叉的过程,凡是有利于状态评估的方法就要利用,需从各学科中总结、利用各种技术和手段。近年来,出现的状态评估方法主要有基于模型的评估方法、基于信号的评估方法以及基于知识的智能评估方法。
对于基于模型的评估,评估对象的数学模型需要首先确立,并在数学模型的基础上对评估对象进行处理,其特征为确立精确的数学模型,然后基于分析模型的各参数,实现对评估对象的实时以及动态评估,但在实际应用中,由于舰船电力推进系统的整体复杂性及非线性等特征,精确的数学模型难以建立,从而限制了基于模型的评估方法在舰船电力推进系统中的应用,还处在理论研究阶段;对于基于信号的评估,评估对象的数据需要首先采集,并应用相应的数学知识进行处理。该方法不仅可以解决其他推进系统中数学模型难以建立的问题,并且适用于线性和非线性系统。但是这种方法受人的主观影响较大,而且只有当故障比较明显时才有效,这使得评估的结果准确性、预测性和实时性变低;基于知识的智能评估方法是将人工智能方法用于状态评估,因其不依赖精确的数学模型,故该方法适合实际工程的需要,具有广泛的应用前景[7]。
2 支持向量机网络
数据分类问题的处理使得支持向量机理论得以建立和形成,确立能将样本正确分开与两类样本距离相等的超平面问题即为数据分类问题。当超平面被确定后,样本位于超平面哪一侧,即为哪一类别。支持向量机可分为线性支持向量机和非线性支持向量机,解决非线性不可分的方法是将输入向量映射到一个高维空间,并在该空间中构造最优分类面。设有一个非线性变换φ(·)将n 维输入1 维输出向量(xi,yi)从原空间映射到高维空间F。分析可得分类函数为:

其中αi为拉格朗日因子。根据泛函理论,在原空间内引入核函数K(·),其运算可以代替高维空间的内积运算:

分类函数为:

支持向量机的结构如图1所示,也可以称为支持向量机网络,它的决策函数与神经网络类似,其输出是几个节点的线性总和,每个节点对应输入样本与一个支持向量的内积。

图1 支持向量机网络的结构Fig.1 First group fused values of the ship heading
3 船舶电力推进系统状态评估流程
船舶电力推进系统主要组成部分有推进变压器、推进变频器、推进电动机、轴系及螺旋桨。当对整个推进系统进行状态评估时,首先须对各部分建立状态指标评价体系,然后运用专家系统统计法建立船舶电力推进系统状态评估指标体系,结合支持向量机网络,构造出船舶电力推进系统状态评估流程如图2所示。

图2 船舶电力推进系统状态评估流程Fig.2 State evaluation process of the ship electric propulsion system
输入数据包含历史数据、此刻数据和未来数据。电力推进系统此时的运行状况可以通过此刻的数据来评估,未来的运行状况可以通过此刻数据和未来数据,并加上应用模型来评估。状态评估方法采用支持向量机法。电力推进系统的状态评估可以分为推进变压器状态评估、推进变频器状态评估、推进电动机状态评估和其他状态评估4 部分,对这4 部分评估后,根据各部分对整个系统的权重得出评分结果。评分结果采用0~100 分的百分制,0 分为状态评估指标超过规定的临界值;100 分表示状态评估与出厂值接近,无需维护。根据评分数,可以把状态分为优、良、中、差、劣五类,其中,0~20分时,运行状态为劣,维修策略为立即检修,21~40分时,运行状态为差,维修策略为尽快检修,41~60分时,运行状态为中,维修策略为优先安排,61~80分时,运行状态为良,维修状态为计划或延期,81~100 分时,运行状态为优,维修状态为延期[8]。当运行状态为“优”时,表示所有的指标接近优质产品质量或出厂值,系统完全处于正常运转状态,此时,整个系统无需进行维修。当运行状态为“良”时,表示所有的指标远没有达到规定的临界值,没有大的质量缺陷,无需进行大规模维修,可延期或按计划维修。当运行状态为“中”时,表示所有的指标已经接近规定的临界值,已经出现不明显的劣化趋势,此时必须马上安排检修。当运行状态为“劣”时,表示所有的指标已经超过规定的临界值,劣化趋势非常明显,此时,必须暂停系统进行全面检修。获得评估结果和检修意见后,再判断是否结束评估,若否则继续评估,否则评估结束[9-10]。
4 基于支持向量机网络的状态评估模型
船舶电力推进系统状态评估流程将电力推进系统的状态评估分为4个部分,系统的评估结果由每个部分的向量机模型子网络的评审结果乘以权重并求和得到。由此设计的船舶电力推进系统状态评估支持向量机模型如图3所示。
图中,N1~N5为4个支持向量机网络,为整个状态评估系统的子网络。其中每个子网络由于评估设备的不同,输入节点和输出节点也不同。网络模型的第2 层根据第1 层判定的设备所处的状态求出设备的状态评估分grade1~grade5,第3 层根据grade1~grade5和各设备的权重求出电力推进系统状态评估的最终评分grade。
基于支持向量机网络的状态评估步骤如图4所示。首先选取核函数,高斯径向基函数一般为首选的核函数,高斯函数的一般格式为:

图3 船舶电力推进系统状态评估支持向量机模型Fig.3 The support vector machine model of the state evaluation of the ship electric propulsion system
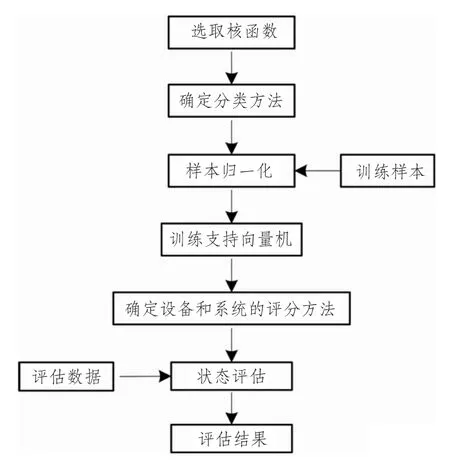
图4 支持向量机网络的状态评估步骤Fig.1 The steps of the support vector machine sate evaluation

其中,σ >0 为核半径。当选择高斯核时,需要选择核参数,对于样本(xi,yi)⊂Rn×{-1,1},i=1,2,…,l,在特征空间中2 点距离可以类似地表示为:

上式可以简化为:

设t个样本属于-1 面,l- t个样本属于+1面,定义Sw=Sw1+ Sw2为同类样本中的类内距离,其中

定义特征向量异类样本间的距离为:

核函数选择后,确定支持向量机分类算法,一般根据算法的复杂程度和样本训练速率,选取SVM分类或M-ary 分类。样本归一化是将训练样本中所有的数据参数采用极差标准化。标准化的数值在[0,1]之间,归一化样本能提高度,减少计算误差,归一化的公式如下:

式中:x(i)为样本中待归一的值;maxx(i)和minx(i)分别为样本的极大极小值。
最后,在核函数和样本归一化参数确立后,采用训练样本对支持向量机进行训练,对样本进行状态评估。
5 结 语
本文对船舶电力推进系统的状态评估方法进行概述和分类,并在此基础上将支持向量机状态评估技术引入到船舶电力推进系统的状态评估中,提出了船舶电力推进系统状态评估流程、基于支持向量机网络的船舶电力推进系统状态评估模型和具体的评估步骤。该方法适合实际工程的需要,具有广泛的应用前景。
[1]彭义健,林焰,陈明,等.船舶推进系统数据库及软件开发[J].舰船科学技术,2012,34(10):53-58.
[2]张洪田,耿瑞光,孙远涛.虚拟样机技术在气垫船推进系统特性研究中的应用[J].舰船科学技术,2012,34(1):41-44.
[3]王汉刚.美国核潜艇推进系统减振降噪技术发展分析[J].舰船科学技术,2013,35(7):149-153.
[4]王丽丽,戴迪,王成江,等.电力变压器状态评估方法综述[J].电气开关,2010,48(2):4-6.
[5]肖燕彩.支持向量机在变压器状态评估中的应用研究[D].北京:北京交通大学,2008.
[6]李士勇.模糊控制、神经控制和智能控制论[M].哈尔滨:哈尔滨工业大学出版社,1996.
[7]王美刚.基于模糊理论的电力变压器状态评估[D].北京:华北电力大学.
[8]李国勇.智能控制及其MATLAB 实现[M].北京:电子工业出版社,2005.
[9]廖伯瑜.机械故障诊断基础[M].北京:冶金工业出版社,2000.
猜你喜欢
新高考·高一数学(2022年3期)2022-04-28
船舶(2021年4期)2021-09-07
中学生数理化·高一版(2021年2期)2021-03-19
中学生数理化(高中版.高考数学)(2021年1期)2021-03-19
船舶标准化工程师(2019年4期)2019-07-24
领导决策信息(2018年16期)2018-09-27
军工文化(2017年12期)2017-07-17
中国船检(2017年3期)2017-05-18
数学学习与研究(2017年3期)2017-03-09
高中生学习·高三版(2016年9期)2016-05-14
