程控电阻板卡系统设计
2015-12-04 08:58周奇文
安徽电子信息职业技术学院学报 2015年1期
周奇文, 邓 华
(安徽江淮汽车股份有限公司技术中心, 安徽 合肥 230601)
在开发新的车型时,对车载ECU进行台架测试已成为不可或缺的步骤。测试时需要输入模拟ECU信号,对于输入的电阻信号要求高精度大范围并且要求操作过程精准无误、简单方便、灵活可控。在测试汽车电子电器的过程中,电阻的动态调节,应对汽车通讯网络有较好的兼容性。目前常用的是NI公司的程控电阻板卡,可以达到很高的精度,但是其输出电阻的范围非常有限,有时很难满足汽车电子电器的测试要求,其余的程控电阻设计则受限于电阻信号的渐变性与汽车网络的兼容性。因此为了更好地满足汽车测试的需求,需要一种程控电阻系统,既能达到很高的精度,电阻信号又有很好的渐变性。本文介绍了一种程控电阻系统的设计,它是基于CAN总线通讯利用CAN板卡控制单片机来实现电阻输出信号渐变的设计,较好的满足了汽车电子电器测试的需求。
一、系统硬件结构
基于CAN总线的程控电阻系统可以通过Lab VIEW平台进行调试,速度更快、精度更高,有较强的通用性。该系统主要包括四部分:CAN数据收发电路,单片机控制部分,电阻输出部分,供电电路。系统的原理如图1所示:
外部给系统供电的是12V直流稳压电源,内部供电电路是12V的继电器供电和5V单片机控制系统供电。供电系统采用DC-DC电源模块LM2596S-5.0实现12V到5V的电压转换。系统供电电路原理如图2所示。
数据接收电路采用高速低功耗CAN收发器AMIS-4266,AMIS-4266是控制器区域网络(CAN)协议控制器和物理总线之间的一个接口,可用于12V,24V系统。CAN数据收发电路如图3所示。
控制电路部分由飞思卡尔12XS128MAL单片机最小系统构成。单片机接收CAN数据缓存中的报文信号,经过内部数据格式换算以及继电器位计算,通过I/O口的高低电平输出,实现对继电器组的控制。由于单片机I/O口的驱动能力有限,采用ULN2003A芯片驱动继电器。电阻输出共设两路通道:并联通道(2通道)和串联通道(1通道)。每通道由二十个不同量值的电阻组成。各通道内电阻量值的分组编排采用8421BCD编码方法。以串联为例进行说明,该通道共有五组,每一组的电阻值如下:
一组1+0R 2+0R 3+1R 6.8+1.2R
二组16+0R 30+2R 62+2R 110+18R
三组240+16R 510+2R 1K+24R 2K+47R
四组3.9K+200R 8.2K 16K+390R 30+3.7K
五组62+3.6K 130+1.1K 240+22K 510+15K
五组共四十个电阻构成,四十个电阻串联接入通道一回路,在每两个电阻组合两端接一个继电器,通过继电器控制对应电阻接入回路与否。例如,要输出330R的电阻,只控制继电器将240+16R,62+2R,6.8+1.2R,2+0R这八个电阻接入回路即可。由于串联通道最小电阻为1R,其分辨率为1R,以1R为基数跳变。分辨率越小,电阻的渐变特性越能够充分发挥。各通道定值电阻均采用精度为1%的电阻,通过程序对继电器内阻的补偿校正,可以保证各通道的输出的电阻精度保持在1%以内。
当阻值范围在0~1K之间并且要求精度在1%以内时采用并联通道可以保证更高的精度,若没有1%的精度要求则选用串联或者并联都可以。
该系统中使用40个继电器来分别控制各个电阻的通断,工作时通断动作频繁,并且电磁继电器具有物理阻断功能,断电后,被控制设备可以完全脱离电源,以及耐受过电压、大电流,且价格实惠,因此这里采用电磁继电器ULN2003A。电阻输出部分电路设计如图4所示。
二、系统软件设计
通过CAN总线,利用CAN板卡(NI-PXI-8513板卡)控制单片机来实现电阻输出信号的渐变,这是程控电阻系统的软件设计的核心。Freescale-12XS128MAL有多个I/O口资源,可同时实现多路控制。电阻的输出过程可以简单概述单片机从CAN收发器缓存中以中断的方式提取其报文信息,计算后配置各I/O口的输出,驱动继电器工作,进而输出相应电阻。每个目标阻值的输出则通过该电阻输出通道的二十个继电器控制通道内各量值电阻接入电路与否来实现。对于各通道内二十个继电器的控制算法采用数组方式(4*5),分配每一个数组元素值继而控制相应继电器的工作。当单片机没有可提取的报文信息时,则持续输出现有阻值。程控电阻系统单片机软件设计流程如图5所示:
程控电阻系统通过上位机发送CAN报文数据控制电阻通道的输出。系统整体控制示意图如图6示。在Lab VIEW控制界面配置CAN报文数据,通过CAN板卡输出报文数据,单片机接受报文数据,根据报文数据配置各通路输出电阻值到汽车ECU。程控电阻上位机控制界面如图7所示。
上位机(Lab VIEW)CAN控制报文编码信息如表1所示:
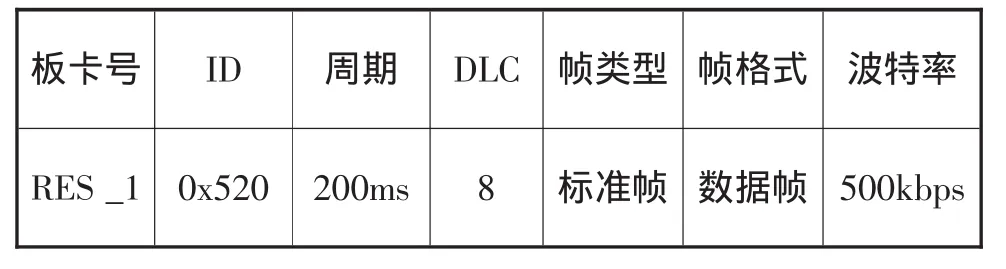
表1 CAN报文编码信息表
程控电阻系统的CAN报文数据位/字节编码格式采用“Intel”格式,其.dbc数据库文件位编码顺序如表2所示:

表2 数据库文件编码顺序
各通道控制信息定义及输出信息如表3所示。

表3 各通道控制信号定义及输出信息
三、系统Lab VIEW程序设计
基于CAN通讯的程控电阻系统在使用过程中体现出来的性能基本满足汽车电子自动化测试的要求。首先调用RES数据库,创建信号输出通道,在VI后面板设置事件函数,包含三个事件(电阻信号值改变、超时、停止),100ms定时循环,改变任何一个阻值将触发报文发送,控制单片机中各个继电器的闭合断开,最后发送给ECU模块。
四、结论
该程控电阻系统可以实现电阻并行控制输出,简化汽车电子电器测试的操作流程,在汽车电子电器自动化测试中发挥着重要作用。其有如下技术特点:
1.基于CAN总线通讯控制方式,可以兼容汽车网络,实现电阻输出的上位机控制,控制方便,灵活性高。
2.电阻的分组编排采用8421BCD编排方式,8421BCD编码器电路对输入信号有所限制,任何时刻只允许输入一个被编信号,否则输出将发生混乱,同时可以实现电阻在大量程内连续高精度输出。
3.采用电磁继电器具有物理阻断功能,断电后,被控制设备可以完全脱离电源,以及耐受过电压、大电流,且价格实惠。
4.使用Lab VIEW软件实现模拟汽车上各种信息参数,可以通过上位机界面设定用户所需参数,例如信号的类型、频率、幅值等参数,具有CAN通信接口,使对ECU的设计测试实现柔性化,节约了台架测试、实车测试的时间,降低了测试风险。
[1]王春武,刘春玲.程控可变电阻的设计与应用[J].电子测量技术,2007,(5).
[2]王丽芳,唐晓泉,等.车用CAN总线测试平台的研发与应用[J].高技术通讯,2005,(1).
[3]徐卓农,万芳瑛,等.一种具有CAN总线接口单片机开发系统的设计[J].湖南工程学院学报,2004,(2).
[4]杨文新.基于CAN总线的单片机自动生产线测控系统的设计[D].江苏大学硕士学位论文,2012.
[5]王 平,江华丽,何花.基于单片机的CAN总线通讯应用设计[J].电子测试技术,2009,(9).
[6]千承辉,苏 建,等.基于CAN总线的汽车检测技术研究[J].武汉理工大学学报,2006,(30).
猜你喜欢
汽车电器(2022年9期)2022-11-07
电子技术与软件工程(2022年11期)2022-09-09
网络安全与数据管理(2022年2期)2022-05-23
科学家(2021年24期)2021-04-25
科技创新导报(2021年33期)2021-04-17
中国外汇(2019年11期)2019-08-27
汽车文摘(2017年6期)2017-12-06
科学中国人(2015年9期)2015-01-28
数字化用户(2014年18期)2014-11-25
邮电设计技术(2011年8期)2011-07-27