数字水准仪误差分析与变形监测
2015-12-04 08:58马广恩
安徽电子信息职业技术学院学报 2015年1期
马广恩
(福建水利电力职业技术学院, 福建 永安 366000)
随着数字技术的发展,传统的光学水准仪正在被数字水准仪所替代。数字水准仪又称电子水准仪,是集光、机、电与微处理器于一体的几何水准测量仪器。数字水准仪实现了水准测量的数据采集、记录和处理的自动化。目前各厂家生产的数字水准仪,虽然仪器型号不同,但在标尺读数、数据记录、各种误差(限差)报警等方面均已实现自动,从而减轻了仪器使用者的劳动强度并大幅度提高了观测工作的效率。它具有人为干预少、工作速度快、读数准确、测量精度高等优点,目前已成为沉降观测、工程水准测量、高精度水准网观测的骨干仪器。
工程建设中需要大量依赖高程数据的测量工作和工程监测。水准测量在工程建设中具有特殊的重要意义。近年来随着数字水准仪的发展和广泛使用,传统水准测量和监测方法也在发生改变。本文将在介绍数字水准仪的基本知识和特点基础上,对其误差来源进行分析,通过数字水准仪在水利工程里的应用,说明数字水准仪在水利工程测量中具有广阔的发展前景,并总结和归纳使用过程中的注意事项。
一、数字水准仪工作原理
一个数字水准仪测量系统主要是由编码标尺、光学望远镜、补偿器、CCD传感器以及微处理控制器和相关的图象处理软件等组成。国际标准ISO 9894给出的定义是:数字水准仪(Digital Level)是用于自动化水准测量的仪器。它采用CCD阵列传感器获取编码水准尺的图像,由图像处理技术将图像转换为水准标尺的读数,标尺图像处理及其处理结果的显示均由仪器内置计算机完成。具体来说,数字水准仪工作原理是:标尺上的条码图案经过光反射,一部分光束直接成像在望远镜分划板上,供目视观测,另一部分光束通过分光镜被折射到线阵CCD传感器的像平面上,经光电转换、整形后再经过模数转换,输出的数字信号被送到微处理器进行处理和存储,并将其与仪器内存的标准码(参考信号)按一定方式进行比较,即可获得高度读数和水平距离。因此,数字水准仪将原有的用人眼观测读数彻底改变为由光电设备自动探测水平视准轴的水准尺读数。如果使用传统水准标尺,电子水准仪又可像普通自动安平水准仪一样使用,但测量精度低于使用配套数字标尺的测量精度。
二、数字水准仪的误差来源及其影响
(一)i角误差影响
由数字水准仪的构造和测量原理知道,数字水准仪存在两个完全不同的i角,如图1所示,数字水准仪在它的望远镜光路中加装有分光镜和光电探测器CCD。望远镜照准标尺并进行调焦后,标尺条码影像一方面被成像在望远镜十字丝分划板上供观测者目视观测;另一方面又在分光镜的作用下成像在光电探测器CCD上进行电子测量。用来目视观测的光线与仪器水平轴线的夹角称作仪器的光学i角;用来进行电子测量的光学(虚拟线)仪器水平轴线的夹角即是数字水准仪的电子i角。仪器自带的i角检测程序可以检测出电子i角的角值,却无法通过改变探测器CCD或补偿器位置的方法来对其进行校正。如图1所示,因为探测器CCD里存着标准编码,其参考点如果稍有变化都将直接影响仪器的精度,而调整补偿器位置也只能在工厂中进行。由此可知数字水准仪的电子i角在使用过程中只能测定,而无法校正。
视准线(i角)误差的大小直接影响着精密水准测量的成果。数字水准仪的视准线误差随环境温度的变化而变化量还是比较大。仪器利用微处理器,将测定的视准线误差值储存起来并对以后每一个测量值进行自动改正,直到重新检定之前会一直沿用。这种特性对于不等视距的平面水准测量是很有利的,但对于区域精密水准测量并不一定有利。因为正常的测量作业中,不可能频繁地进行视准线误差测定,实际改正的误差值并非当时的真实值,因此又带来了另一种本可以避免的误差源。因此对于精密水准测量,除了严格执行前后等视距观测外,每次作业前要测定视准线误差。
(二)地磁场的影响
作为电子仪器,数字水准仪内部的电子元件不可避免地受到周围磁场的干扰影响,在观测成果中产生误差。与精密光学水准仪的补偿器受到的磁场干扰不同的是,数字水准仪受到磁场干扰的机理比较复杂,不容易严格测定。可以通过一些有益的实验总结出磁场对测量结果的影响幅度值。
目前已经知道,磁场垂直分量和与视线平行的水平分量对仪器影响显著。这就是说,在实际作业中,沿南北方向观测,仪器将受地球磁场水平分量与垂直分量影响;而沿东西方向观测,仪器虽不受水平分量的影响,但仍受到垂直分量的影响。
经实验证明,几乎所有的数字水准仪均不同程度地受电磁场的影响。在110 kV高压线路下,当视距小于30 m时,Dini12和NA3003受到的影响可达±0.2 mm。当视距大于50 m时,对Dini12的影响可达±0.3 mm,对NA3003的影响可达±0.8mm。因此,实际作业时,应尽量避免水准线路经过强电磁场。
(三)标尺安置状态的影响
对于数字水准仪,仪器在自动测量过程中对标尺安置状态的监视反应很迟钝。标尺偏离垂直状态很大范围时水准仪仍然会测量。因此标尺安置显得很重要。水准尺经检验校正合格后,便可实际作业。但外业观测过程中,会出现水准尺竖立不直的现象,影响水准测量的读数精度。如果尺子没有竖直则会使尺上的读数增大。如下图设尺子的倾斜角γ,因为α=α′cosγ,Δα=α′-α=α′(1-cosγ),可见Δα的大小既与尺子倾斜角γ的大小有关也和在尺上的读数α′的大小有关,如果设α′=2 m,当尺子倾斜大约2°时,就会造成约1 mm的读数误差,因此作业时努力使水准尺保持竖直位置是很重要的。在外业观测时,为保持尺的竖直,一定要采用尺撑,避免仅用手来扶尺的做法。
(四)光亮强度的影响
在水准测量过程中,水准标尺的亮度是很重要的。由于水准测量都是在野外进行,标尺的亮度或者由标尺分划(条码)反射得到的光通量是由太阳、云量、空气状况及观测方向等因素决定的。而各个因素又都在动态变化着,因此,对其控制是困难的,而数字水准仪的CCD图像传感器只能在有限的亮度范围内将图像转换为用于测量的有效电信号。信号强度跟时间有关系。像照相机一样用控制曝光时间来保证一定的光通量,其曝光时间的范围大约为几毫秒到2秒之间。采样条码群体中亮度不均匀时(如遇阴影),就会使曝光时间失控,部分条码曝光过度,部分条码曝光不足,轻微的不均匀引起局部畸变,影响测量精度,严重时使仪器自动中止测量。在逆光或背景光线很强时进行测量,标尺图像对比度下降,即使传感器CCD有充分的光通量,而测量实体标尺条码却曝光不足,使测量信号的估算产生困难,往往造成测量失败。即使能够测量,也使测量精度下降。在此种情况下,必须改变仪器或标尺的安置位置或转动标尺方向,重新进行测量。另外在测量中光强发生强烈变化时,如闪烁、闪断等,往往使正在进行的测量中断而又自动重新开始,不但影响测量精度,而且使单次测量时间延长,此时应停止测量。在测量中,若仪器处的亮度大于标尺处的亮度时,光线通过仪器的物镜和目镜的漫反射,使CCD的本底噪声增大,造成标尺条码曝光不足,使测量失败或影响测量。这时可将目镜遮住,物镜罩上遮光罩,情况就会得到改善。
光强变化对测量的影响。使用数字水准仪进行水准测量的过程中,光线环境对测量精度影响很大。野外作业时,由于太阳光、云层、空气状况及瞄准方向等因素的影响,条形码尺的尺面反射光和仪器单位时间内接收的光通量是不断变化的。由于数字水准仪的CCD图像传感器只能在一定的光强范围内有效的将图像转换为点信号,对于采样范围内的亮度不均匀的条形码群体,极易影响测量精度。数字水准仪不但对光线变化要求较高,对光线强度也十分敏感,所以使用数字水准仪测量时要充分考虑到环境光对仪器的影响。因此,数字水准仪进行测量时,要选择时间对称的早晨、傍晚进行路线测量或光线相对温和、均匀的时段进行观察,尽量避免在强光、逆光的情况下进行观测,以防光线太强或太弱给测量精度带来的影响。
(五)视距的影响
实验场地为单位内部一个空旷的球场。用尺撑固定一对数码标尺。采用南方测绘DL-2007型数字水准仪对两把尺子进行连续读数。在满足前后视距差的基础上,前后视距每次增加5米。这样读取12站数据,每根标尺得到24个数据。实际上两根标尺位置都没有变化,也就是高差是固定值。取其平均值作为该特定视距下的高差观测值。高差观测值与视距的关系见图3。纵轴为高差观测值,横轴为视距。由图可以看出,当仪器距离标尺的距离小于50米时,高差变化在0.2mm之内。
(六)其他因素的影响
对数字水准仪的误差源进行实验的场地位于某垃圾处理站隔壁。垃圾处理来往载重车辆较多。考虑到路面震动对水准测量的影响,在路面一侧进行了震动实验:仪器距离路面从5m至60m由近逐远,每隔5m设置测站检验1次。轻微振动时,条码尺十字丝微微跳动,在5m、10m、15m时能顺利通过读数,视距在20m以上可通过读数,但读数时间延长;特大振动时,10m以下可通过单次读数,一站读数偶尔通过,但读数可信度低,测段往返闭合差一般超限,视距在20m以上不能通过读数。
由于影响水准测量精度的因素还有很多,诸如地球曲率、水准尺尺面误差、条码尺读数误差、温度的影响等。考虑到本文中的水准测量测区范围和仪器检验检定情况以及观测时段和天气等情况,就不再对上述几种影响因素进行赘述。但是实际外业观测过程中都必须要尽可能考虑到各种影响因素,才能获得比较可靠的测量数据。
三、数字水准仪在某水电站变形监测中的应用
根据厂区情况采用电厂提供的ZD51高程基准点,以及从ZD51水准点引测的K2、K3、K4、K5、K6、K7、BM1、BM2等水准点作为高程工作基点,组成高程基准点环线水准路线。以ZD51控制点为基础,新增设K1、K2、K3、K4、K5、K6、K7等7个控制点,组成新的厂区测量控制网。其中K1为原来的ZD51控制点。控制点和基准点分布图见图4。
厂区建(构)筑物沉降变形观测的外业数据选用《地面测量工程控制与施工测量内外业一体化和数据处理自动化系统》处理,采用间接平差法进行计算,再求出中误差,以检验建筑沉降观测的精度。
建筑变形测量精度级别为二级(建筑变形测量二级精度级别指沉降观测点测站高差中误差即单位权中误差≤0.5mm);本次厂区建(构)筑物沉降变形观测,各条环线水准路线均按建筑变形测量二级精度指标施测(高于合同要求)。在施测过程中充分考虑到i角误差、标尺安置状态以及视距的影响,严格控制水准测量的前后视距,采用尺撑固定水准尺并控制视线长度。首先对观测数据进行正常水准面不平行的改正,ε=-0.0000015384sin2φ*△φH=0.2mm,φ是K1点到K7点的平均纬度,△φ是起点终点纬度差值,H代表起点终点的平均高程值;然后计算各环线闭合差,环1(K1-K2-K3-K4-K5-K6-K1)闭合差为0.3mm,限差为1.61mm,路线长度为1.60284KM;环2(K1-K2-K7-K1)闭合差为0.1mm,限差为0.9mm,路线长度为1.01123KM。闭合差小于限差要求。数据合格。由已知点K1和观测值可以计算出概略高程,详情见表1。对高程值采用间接平差,解算法方程后计算出平差结果,计算过程省略,结果见表2。

表1 概略高程计算表
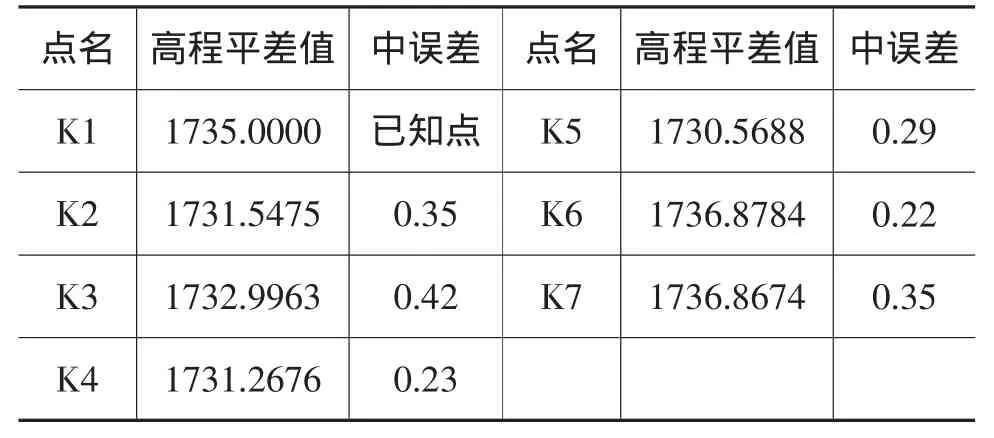
表2 高程平差结果表
从观测成果分析,各条环线水准路线的测站高差中误差均小于先验观测点测站高差中误差0.5mm,达到建筑变形测量二级精度指标要求。表明本次观测成果合格。
四、结论
数字水准仪相比传统水准仪有着诸多优点,更能适应复杂多变的工程应用环境,但是也需要注意各种误差来源,这样才能得到可靠稳定的测量成果。通过在变形监测中的应用,证明数字水准仪可以胜任精密工程变形监测。
[1]孔祥元,梅是义.控制测量学(第二版)[M].武汉:武汉大学出版社,2002.
[2]杨俊志.数字水准仪误差分析与检定[J].测绘学院学报,2001,(3).
[3]闫占瑞,刘全明.数字水准仪i角随温度变化的影响分析[J].铁道勘察,2005,(5).
[4]龚真春,李伟峰,薛 宠.数字水准仪测量精度分析及其在工程中的应用[J].测绘与空间地理信息,2012,(2).
[5]岳建平,秦茂芬.观测条件对数字水准仪读数的影响试验[J].测绘通报,2006,(9).
猜你喜欢
今日农业(2021年11期)2021-11-27
小学生学习指导·低年级(2021年6期)2021-09-10
中学生数理化(高中版.高考理化)(2020年2期)2020-04-21
当代陕西(2019年5期)2019-03-21
电脑爱好者(2017年15期)2017-08-31
中国教育技术装备(2016年22期)2017-03-02
润·文摘(2016年4期)2016-07-13
科技视界(2016年10期)2016-04-26
吉林农业(2015年6期)2015-10-16
科技与创新(2015年11期)2015-06-16