基于MEMS器件的弹载组合导航技术
2015-12-02 03:49刘剑威徐国亮王海川
指挥控制与仿真 2015年3期
刘剑威,徐国亮,王海川
(江苏自动化研究所,江苏 连云港 222061)
在现代武器装备中,历史最为悠久的火炮武器以其用途广、反应速度快、储弹量大、弹药成本低的优势,仍然是现代战争中最为重要的武器装备之一。随着底排火箭复合增程和火箭助推滑翔增程等火炮弹药增程技术的发展,新型大口径火炮的射程有了大幅度的提高。由于传统火炮弹药大都属于“发射后不管”类型,射程越远,弹着散布就越大,无法满足精确打击的军事需求,因此,在火炮弹药射程大幅度提高的情况下,为了减小射击散布误差,提高对目标的毁伤效能,就必须发展在发射后具有制导/修正能力的制导/修正弹药[1]。
在一般情况下,常规炮弹在30km的射程上,对目标射击的圆概率误差呈100m×400m的卵形分布。精确制导炮弹,落点的圆概率误差可以减小到10~20m,且炮弹散布误差不随射程变大而增加。武器命中精度提高1倍几乎等效于弹药当量增加到8倍,使得炮弹消耗成本降低,后勤支持负担减轻,因此精确制导炮弹极大地改变了传统的作战方式,已经成为现代战争的主要攻击手段。
制导弹药的发展对弹载导航系统的精度和可靠性要求越来越高,例如要求导航系统能提供全面、精确的导航定位信息,能全天候工作,自主性强,抗干扰性能好等,但到目前为止,没有哪一种导航设备单独使用就能满足这些要求。20世纪80年代出现的组合导航系统,就是为了弥补单一导航系统的不足而发展起来的。根据不同要求有各种不同的组合导航系统,由于惯性导航系统突出的优点,使得它成为各种组合导航系统的首选,目前应用较多的有地形辅助惯性导航系统、多普勒/惯性导航系统、INS/GPS导航系统、INS/天文导航系统等。
以卫星定位/惯性组合导航系统应用最为广泛。卫星等外部基准信息的成功引入,修正了惯导系统随时间积累的位置误差,而惯导系统反馈信息又拓宽了卫星定位系统的动态范围。因而发展惯性系统和卫星组合导航系统成为一个重要发展方向。卫星/惯导组合导航设备既具有惯导系统的完全自主化优点,又具有卫星高精度定位、无位置误差积累的特点,可弥补惯导或卫星单一定位模式的不足,获得更高的导航精度、提升制导炮弹的抗干扰能力。
现有的惯性导航系统大多采用激光陀螺或光纤陀螺作为传感元件,虽然精度很高,但体积偏大,抗冲击能力差,并且价格昂贵,大大限制其在特殊精确制导弹药(如制导火箭弹和炮弹等)中的应用。近几年来,微惯性器件的应用将改变这一局面。微惯性传感器具有体积小、质量轻、耐冲击、功耗低、成本低廉等优点,可克服光纤和激光陀螺等器件的诸多因素制约,已得到广泛的研究和应用。国外微惯导器件的发展速度很快,最初只能用于中低精度要求的场合,20世纪90年代中期,MEMS(Micro-Electro-Mechanical System)陀螺仪漂移的稳定性为500°/h,21世纪初就达到了1°/h以内,抗过载能力也从6500g提高到20000g,体积、重量和功耗也大幅度减小,已能够满足制导弹药的应用要求。
1 组合导航总体技术设计
弹载组合导航系统是利用微惯性测量单元(MIMU—micro inertial measurement unit)构建出捷联惯性导航仪(SINS),再接收卫星定位信息,来对SINS的导航信息进行实时补偿,以得到精度较高的位置、速度、姿态等信息的组合系统。由于要将其应用在制导炮弹上,因此它需要有良好的稳定性和抗震能力,同时还要较快的反应速度,且能在不同的温度条件下工作。因此,在设计时,不仅需要对其要实现的功能进行规划分析,还得根据其工作环境进行芯片的选型与电路设计。
首先,进行弹载卫星定位系统、惯导系统的硬件平台结构设计,主要包括微惯导装置、卫星接收天线、卫星接收机、导航计算机、安装基座及减震装置,以缩小体积、减轻重量、降低功耗,并为用户制导控制软件的嵌入留有足够的空间和运算能力;采用统一灌封加固技术,提高硬件的抗高过载能力,满足制导炮弹10000g~20000g过载需求;卫星定位装置采用多天线侧壁布置方式,为制导炮弹留出头部更多空间。然后,进行组合导航软件设计,采用非线性温度补偿技术对微惯性器件进行高精度标校;采用高动态旋转定位技术,解决制导弹药卫星定位问题;采用卫星辅助MEMS测量信息的姿态角估计技术解决了空中对准问题;采用基于四元数的差量卡尔曼滤波技术,实现了高滚转角速度下的卫星定位与微惯导的高精度组合导航。总体设计如图1所示。

图1 弹载组合导航总体设计示意图
2 关键技术分析及其解决
2.1 抗高过载设计
通过分析炮弹发射过程中后坐冲击加速度、前冲加速度、横向加速度以及径向加速度的作用大小、方向、持续时间等主要影响因素,研究元件总体布局的应力效应。由此提出适应高过载环境的元器件、电路板、接插件布局方案以及对微惯性元件及电路模块的缓冲保护措施,有效增强电子设备在恶劣环境下的存活性,提高组合导航系统的抗高过载性能[2]。
在高过载冲击环境下,电路元件的体积大小、结构形状及其质量密度将直接影响到设备的过载生存能力。通过基本的力学公式:F=ma,而元件的质量由密度和体积确定,即m=ρV,则有:F=ρVa,可见在同一密度或材料确定的条件下,体积越大,系统的强度问题会越严重,而且在高过载作用下,每一个元件所受到的惯性力也远远大于其本身的质量,这是造成元件断裂、变形或电路不能正常工作的主要原因。
假设弹载设备端面面积为S,在炮弹发射时端面所受到的应力为 δ,则由:F= δS=ma= ρVa= ρSha(ρ为平均密度,h为设备在弹体内轴向高度),得到:δ=ρha,可知设备端面所受到的应力和设备的高度、密度及其过载加速度成正比。因此,为降低高过载对弹载设备的破坏力,在组合导航原理样机设计时,遵循以下原则:
·通过选取比重低、强度高的原材料,减小设备体积,达到微型化设计目的;
·合理设计电路结构,降低设备的轴向高度;
·内部结构合理布局,确保应力分布平衡。
选择合适的灌封材料,通过增加被冲击体的响应时间,将冲击脉冲展宽,达到降低冲击幅度的目的。
2.2 弹载微惯导器件的误差模型与补偿技术
微惯导器件精度是保障系统导航精度的基础,通过改进惯性传感器结构、电路设计,改进加工工艺等提高器件测量精度,周期长、成本高、难度大;而通过误差建模分析,标定补偿提高器件测量精度是切实可行的方法。
首先,从陀螺及加速度计的原理模型出发,通过实验室试验测试,分析惯性元件的安装误差、刻度因子、零偏、零偏稳定性、交叉耦合系数及随机漂移等主要误差源[3-4],重点对其温度特性及随机漂移进行深入分析,建立了补偿模型算法,并通过试验对补偿方法的正确性进行验证。其次,通过大量的过载试验,综合分析惯性元件过载前后的试验数据,以此建立了适合弹载环境应用特点的误差补偿模型。
2.3 姿态空中对准技术
微惯导解算的前提条件是进行初始对准,初始对准需要以下参数:位置参数(北B,东L,天H),速度参数(北向速度VN,东向速度VE,天向速度VU),姿态参数(航向角ψ,俯仰角θ,滚转角γ)。
空中对准所需的位置参数和速度参数可以直接从卫星定位组件获得,偏航角参数和纵摇角参数可以用速度参数合成计算获得,空中对准技术的难点是姿态参数中滚转角参数的确定。
北斗定位组件微惯导初始对准的诸元素及失准角的空间位置关系参见图2。

图2 初始对准失准角空间位置关系示意图
滚转角参数则是通过基于卫星和陀螺测量信息的滚转角估计技术获得。
弹载导航系统属于动基座,受发射前不能加电的制约,又不能采用传递对准,属于空中自对准范畴,国内尚未有成熟的解决方案。本项目采用了基于卫星速度辅助和惯导陀螺测量信息的滚转角估计方法。在卫星定位后,可使用卫星定位装置提供的弹丸分速度测量值,近似计算出弹轴的俯仰角和航向角(忽略弹丸章动和进动的影响):

式中,ψ为弹轴的航向角,θ为弹轴的俯仰角,VE、VN、VU分别为弹丸的东向、北向和天向分速度。
通过对弹轴的航向角和俯仰角的微分,可计算出弹丸的侧向和俯仰角速率;再根据惯导系统中陀螺安装的几何关系,即可推导出垂直于弹轴安装的两个陀螺测量的角速率,与计算出的弹丸侧向和俯仰角速率以及滚转角的数学关系式。由于在短时间内,弹丸转速可认为是匀速运动,由此,可依据卫星定位装置提供的弹丸分速度、陀螺测量的角速率数据,采用滤波算法估计出弹体的初始滚转姿态角,用于惯导系统的空中初始对准。
由于弹体空中运动的复杂性非协调性,北斗定位组件提供的初始对准数据:航向角、俯仰角和滚转角,都包含有较大的误差,通常:
方向失准角≤3°,俯仰失准角≤3°,滚转失准角≤8°。
空中对准可细分为三个阶段:粗对准阶段、失准角收敛阶段、精对准阶段。利用计算参数匹配法来进行传递对准,把失准角当作一个整体,利用北斗定位组件和MEMS惯导系统计算出位置差、速度差来对MEMS惯导进行扩展卡尔曼滤波,最终达到精对准的目的。
2.4 弹载微惯导/卫星紧组合算法
弹载微惯导/北斗卫星紧组合定位导航算法,以卫星定位系统提供的伪距和伪距率的测量值,用于生成组合导航系统的误差估计值;以位置误差、速度误差、失准角误差、微惯导误差参数为卡尔曼滤波系统状态向量[5-6],根据各类观测方程的观测精度设置对应的方差矩阵参数,联合建立卡尔曼导航滤波递推算法,滤波后的系统状态向量持续修正微惯导零漂,组合导航系统输出数据用于辅助卫星跟踪回路。弹载微惯导/卫星紧组合导航算法流程框图如图3所示。
在弹载微惯导/卫星紧组合模式中,状态变量主要包括两部分:一部分是惯导系统的误差状态,第二部分是卫星定位系统的误差状态。考虑到弹载工程应用的特点,组合导航系统误差模型可取17个状态变量[7],其中,
·惯导系统的状态变量通常取16个:4个姿态误差四元数 δq0,δq1,δq2,δq3;3 个速度误差 δVe,δVn,δVh;3个位置误差 δL,δλ,δh;3 个陀螺随机漂移误差 εbx,εby,εbz;3 个加速度计零位误差 2ax,2ay,2az。

图3 弹载微惯导/卫星紧组合导航原理框图
·卫星定位系统的状态变量通常取2个与时间有关的误差:一个是与时钟误差等效的距离误差δtu,另一个是与时钟频率误差等效的距离率误差δtru。
偏差δXk的卡尔曼滤波方程为

将导航卫星输出的位置和速度信息与惯导的相应输出信息相减得到测量方程,即

最优滤波值:

3 地面验证结果
采用地面跑车形式验证弹载组合导航系统性能。试验流程为:
1)安装组合导航系统、舵机、黑匣子等,组成测试样弹控制舱段,将样弹安装在无磁转台上,并放置于汽车平台上,固定牢靠;
2)达到指定地点后,汽车开始运动,驱动转台按照相应转速转动,转速范围为 1.8~2.0r/s,将俯仰角调整至25°左右,为全弹上电,工作一定时间后,汽车运动停止,调整俯仰角至45°左右,保持一段时间后,将俯仰角重新调整回至25°左右,汽车继续运动,系统工作达到预定时间后,汽车运动停止;
3)断电,读取黑匣子试验数据,评估组合导航系统的性能。
弹载组合导航系统位置、速度导航精度统计结果如表1所示。

表1 转速1.9转/s时位置导航精度统计值
弹载组合导航系统姿态导航精度统计结果如表2所示,其中俯仰角解算曲线如图4所示。
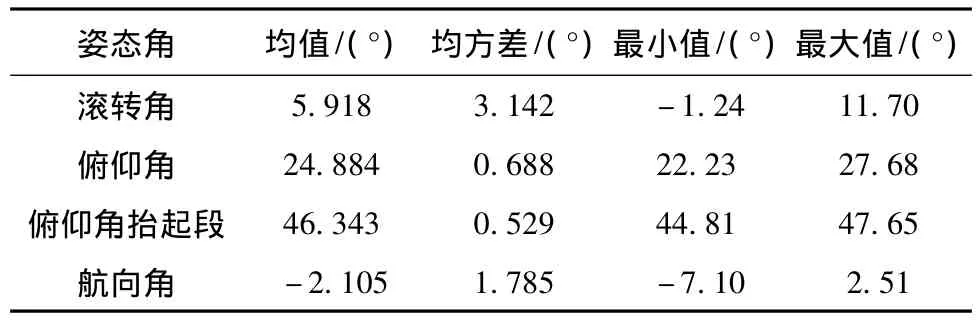
表2 转速1.9转/s时姿态解算精度统计
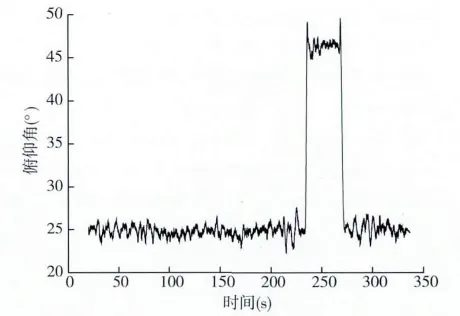
图4 转速1.9转/s时组合导航计算俯仰角曲线
组合导航位置输出结果与卫星测量值相一致,X、Y、Z方向均值小于0.5m,均方差小于5m,姿态解算正确,精度满足要求。
4 结束语
结合某型制导弹药,本文开展了基于MEMS/卫星的组合导航技术研究。在分析弹载微惯性/卫星组合导航的总体需求基础上,深入研究了弹载导航关键技术以及各关键技术的解决方案。提出适应高过载环境的元器件、电路板、接插件布局方案以及对微惯性元件及电路模块的缓冲保护措施,提高了组合导航系统的抗高过载性能,采用卫星辅助MEMS测量信息的姿态角估计技术解决了空中对准问题,采用基于加性四元数的差量卡尔曼滤波技术,实现了卫星定位与微惯导的高精度组合。试验结果表明,该技术可有效解决制导弹药的组合导航问题,具有一定的工程应用价值。
[1] 白毅,仲海东,秦雅娟.国外制导炮弹发展综述[J].飞航导弹,2013(5):33-38.
[2] 李荣冰,刘建业,孙永荣.MEMS-IMU构型设计及惯性器件安装误差标定方法[J].中国惯性技术学报,2007,15(5):526-529.
[3] 何昆鹏.MEMS惯性器件参数辨识及系统误差补偿技术[D].哈尔滨工程大学,2009.
[4] 秦永元.惯性导航[M].第 2版.北京:科学出版社,2014.
[5] 秦永元,张洪钺,汪叔华.卡尔曼滤波与组合导航原理[M].第2版.西安:西北工业大学出版社,2012.
[6] 马云峰.MSINS/GPS组合导航系统及其数据融合技术研究[D].南京:东南大学博士学位论文,2006.
[7] Yu M J,Lee J G,Park H W,Comparison of SDINS inflight alignment using equivalent error models[J].IEEE transaction on Aerospace and Electronic systems,1999,35(3):1046-1054.
猜你喜欢
舰船科学技术(2022年10期)2022-06-17
数字海洋与水下攻防(2020年5期)2021-01-04
宇航学报(2019年8期)2019-09-06
专用汽车(2018年10期)2018-11-02
当代陕西(2018年12期)2018-08-04
北京航空航天大学学报(2018年1期)2018-04-20
北京航空航天大学学报(2016年9期)2016-11-16
北京航空航天大学学报(2016年7期)2016-11-16
北京航空航天大学学报(2016年4期)2016-02-27
弹箭与制导学报(2015年1期)2015-03-11