
小家电开门机关键部件的选型
2015-11-30 06:39:57周飚徐兰武洪强孙永波
家电科技 2015年10期
周飚 徐兰 武洪强 孙永波
(1.国家家用电器产品质量监督检验中心 安徽合肥 230088;2.北京中家智锐科技有限公司 北京 100053)
小家电开门机关键部件的选型
周飚1徐兰2武洪强1孙永波1
(1.国家家用电器产品质量监督检验中心 安徽合肥 230088;2.北京中家智锐科技有限公司 北京 100053)
本文针对小家电开门机的关键部件的的选型计算进行了详细的阐述,通过力、力臂、弧度、速度、加速度等已知参数计算出力矩、转动惯量、惯性矩,最终计算出总力矩。通过不同开门动作的总力矩的比较,确定最终力矩,从而计算出所需功率。通过与电机参数的比较,从而确定电机功率、扭矩、减速比,确定所使用的电机型号规格。
力;力臂;弧度;速度;加速度;力矩;转动惯量;惯性矩;功率;减速比
1 引言
GB 4706.21中规定,微波炉的门系统,包括铰链、微波密封件和其他相关部件的结构都应经受正常使用中产生的磨损,其主要主要试验方法就是进行门系统的耐久性试验。由于微波炉种类繁多,大小不一,开门方式不同,开门方向不同,开门角度不同等,针对这些情况,随着对实验设备要求的不断提高,需要一种能模拟真实情况满足多种开门方式的开门设备,可自动记录门的运动轨迹,开门的速度和开门次数都可调节,精准定位产品的开关门位置,减少设备的震动,增加设备寿命。其中对摆臂机构各个驱动电机的选择尤为重要。本文通过对力、扭矩等进行精确计算,多种不同的运动过程的计算结果进行比较,确定最终所需部件的关键参数,从而选定关键部件,使设备能够按照预期要求运行,满足试验和标准的要求。以下介绍了关键部件的计算过程和选型。
2 关键部件的选型
市场开门设备上一般采用单轴运动方式,对于各种型式的微波炉门的试验实现方法不具有通用性。本设备采用的是四杆机构的原理,曲柄的转动带动连杆和摆杆转动,摆杆上安装吸盘从而开关样件门;根据试件的高度不同,机构设计有升降功能,适合不同大小的门;根据样品开门方式的不同,机构设计有旋转功能,整个开门机构旋转。
摆臂机构采用曲柄连杆机构,实现开关门的动作。大臂是曲柄,是驱动机构,小臂是连杆,吸盘部分和样件门是摆杆,大臂的转动带动其他杆的摆动,曲柄连杆机构是有死点位置的,所以必须在小臂上同样安装电机驱动,为了减轻重量和运动惯量,摆臂部分全部采用铝合金材质。
2.1 大臂电机选型计算
首先进行大臂电机选型的计算,目前市场上的微波炉的开门方式主要有侧开门和下开门两种。侧开门又分为直拉式和按钮式,直拉式需要一个初始力,按钮式则不需要。下开门则一般为直拉式。
(1)在对大臂下开门进行计算时,将此动作分解,选取其中开门时、关门时、开到最大位置关门时三种最不利情况为基础计算。
通过标准要求,以及对微波炉开门动作的实际测量,以最严酷的状态计算,即一分钟20次,门从0°到120°(单程)所需要的时间为1.5s;大臂转动的总角度为107°;大臂角速度从0加速到最大所需要的时间为0.1s;摆动部的质量为30kg。由此计算得出:角度转化为弧度:107°/180×π=1.87rad;大臂最大角速度:1.87/1.5S=1.244rad/s;大臂最大角加速度:ε=1.244/0.1S=12.44rad/s2。
对开门时力矩分析得出,开门时的力矩包括:开门力产生的力矩,重力产生的力矩,开门时瞬间加速度产生的力矩。
通过实际测量(如图1),确定开门力F=40N,力臂L=0.475m;由以上两数值得出开门力矩为:T1=FL=40×0.475=19Nm,且方向为逆时针;同时重力产生的力矩:30kg×0.462m=138.6Nm,方向是顺时针;开门时瞬间加速度产生的力矩如图2。
转动惯量(如图2):J=8.1kgm2;惯性矩:M=Jε=8.1×12.44=100.764Nm;通过对力矩方向分析,确定开门时的总力矩为:
-138.6+19+100.764=-18.836Nm
由此计算得出电机所需要的力矩方向与大臂运动方向相反。
对关门时力矩分析得出,关门时的力矩包括:重力产生的力矩,关门力产生的力矩。
通过测量(如图3),关门力20N,力臂仍然以L=0.475m计算,关门时的力产生的力矩为:20N×0.475=9.5Nm,且方向是顺时针;重力产生的力矩大小和方向与开门时相同:138.6Nm,方向是顺时针。由以上数值确定关门时的总力矩为:138.6+9.5=148.1Nm,由计算得出电机所需要的力矩方向与大臂运动方向相同。

图1 开门时大小臂示意图
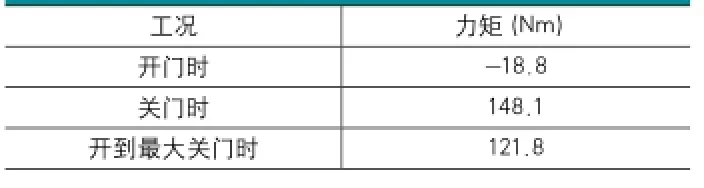
表1 对三种开门动作分析计算结果

图2 开门时大小臂质量属性

图3 关门时大小臂示意图

图4 门开到最大时大小臂示意图

图5 开门开到最大时大小臂质量属性
对门开到最大关门时分析得出,当门开到最大关门时的力矩包括:重力产生的力矩,瞬间加速度产生的力矩。
计算重力产生的力矩(如图4):
30kg×0.066m=19.8Nm,且方向是顺时针,瞬间加速度产生的力矩如图5。
转动惯量(如图5):J=8.2kgm2;惯性矩:M=Jε=8.2×12.44=102Nm。通过对力矩方向分析,计算得出总力矩为:102+19.8=121.8Nm;由计算得出电机所需要的力矩方向与大臂运动方向相同。通过对以上三种开门动作分析计算,结论如表1。
通过比较最后得出:关门时电机所需要提供的力矩最大为148.1Nm,假设安全系数取1.5,力矩为:148.1×1.5=222.15,取整225Nm。根据所需要的最大力矩计算得出,所需要的总功率是:P=225×1.244=279.9W;目前所选择的的电机额定转矩是2.4Nm;额定输出功率是750W;所需要的理论减速比为:225/2.4=93.75≈100。
(2)另外,还需要对大臂侧开门时需要的力矩进行计算。侧开门分为三种情况:开门时、关门时、开到最大位置关门时。通过对三种情况力矩
的计算,最终得出结论是侧开门时的力矩比下开门时的力矩小,即由下开门的最终结论确定大臂电机参数,选取型号。具体过程这里不再赘述。
2.2 小臂电机选型计算
在进行小臂电机选型计算时,同样分为下开门和侧开门,同样按照开门时、关门时、开到最大位置关门时的三种工况计算。计算过程中需注意机械臂的转动角度、力臂的选取,得到的结论同样是侧开门时的力矩比下开门时的力矩小,即由下开门的最终结论确定小臂电机参数,选取型号。
3 结论
通过对大臂和小臂不同动作所需要的力,根据力臂的长度,开门角度等计算得出控制摆臂机构控制大臂和小臂所必须的力矩及功率,通过同所选电机的参数功率、力矩、减速比的比较,最终确定电机的品牌和型号。另外根据本设备的设计方案,还需要对转动电机和升降电机进行计算选型,从而完成整套设备所有电机的选型。本设备最重要的电机为大臂电机,通过多次试验,使用不同形式的电机进行调试,最终确定大臂电机采用谐波减速机,这种减速机体积小、重量轻、传动精度高,很多工业机器人都采用这种减速机。可以有效减少设备的震动,增加设备寿命。使测试设备实现过程的适用性、符合性、可靠性以及正常使用的复现性等要求日益具体化和指标化。
[1] GB 4706.21-2008 家用和类似用途电器的安全 微波炉的特殊要求
[2] GB 4706.22-2008 家用和类似用途电器的安 驻立式电灶、灶台、烤炉级类似器具的特殊要求
[3] 成大先主编.《机械设计手册》第五版.化学工业出版社
Selection and calculation of key parts for Door durability equipment of small household electrical appliance
ZHOU Biao1XU Lan2WU Hongqiang1SUN Yongbo1
(1.National Center for Supervision & Inspection of household Electric Application Product Quality Anhui 230088; 2.Beijing Chearizhirui Beijing 100053)
This paper describes the selection and calculation of the key components for Door durabilityequipmentof small household electrical appliance in detail. throughthe known parameterswhich are force and the arm of force, curvature, speed, acceleration, etc. calculate torque, inertia and moment of inertia, finally calculates the total torque. Through the comparison of the total torque of the different Door durability movements, the final torque is determined, and the required power is calculated. By comparing with the motor parameters, the motor power, torque, and reduction ratio are determined.
Force; The arm of force; Curvature; Speed; Acceleration; Torque; Inertia; Moment of inertia; Power; Reduction ratio
猜你喜欢
中国机械工程(2023年17期)2023-09-19 06:46:22
农业装备与车辆工程(2022年4期)2022-10-31 10:21:48
星星·散文诗(2022年34期)2022-09-03 09:23:43
包装与食品机械(2021年5期)2021-11-06 11:40:14
环境技术(2021年4期)2021-09-11 08:26:06
制造技术与机床(2019年12期)2020-01-06 03:17:44
组合机床与自动化加工技术(2019年5期)2019-05-24 03:48:50
载人航天(2016年4期)2016-12-01 06:56:21
综合智慧能源(2014年1期)2014-09-10 07:07:40
中国工程机械学报(2014年3期)2014-05-25 08:31:14
