调平的测量误差分析与倾角传感器精度的选择
2015-11-28 03:35杨润泽芝世磊
传感技术学报 2015年10期
杨润泽,芝世磊,吕 波
(1.军械工程学院机械制造教研室,石家庄050003;2.军械工程学院防空警戒雷达教研室,石家庄050003)
调平的测量误差分析与倾角传感器精度的选择
杨润泽1*,芝世磊1,吕 波2
(1.军械工程学院机械制造教研室,石家庄050003;2.军械工程学院防空警戒雷达教研室,石家庄050003)
为减小调平误差,正确选择合适的传感器及其精度,以平台调平的倾角测量为研究对象,通过分析和计算推导出平台水平倾斜度与测量的方向倾角之间的数学关系式,并运用数学理论及误差合成原理重点对测量误差进行分析处理;最后在分析倾角传感器具体误差内容的基础上,以平台水平度允差作为误差参考标准,得到了在实际应用中平台调平的判断准则及传感器精度参数选择的理论依据,为后续的实验验证奠定了基础。
调平;倾角传感器;误差分析;数据处理;测量精度
武器装备的各类移动发射平台、侦测平台等都有将工作平台迅速调整到水平的需求。为此,广泛采用了自动调平技术[1-4]。自动调平基本原理是:传感器检测待调整平面的倾角大小,根据二维倾角的大小确定最高支承点,通过机电传动或液压传动的方式提升较低支承点的高度,从而达到减小倾角的目的,当倾角小于调平精度允差时,完成调平。目前测量倾角的方法主要有水泡式水平尺测量法[5]、倾角传感器测量法[6-7]、仪器测量法[8]等方法。水泡式水平尺测量法测量速度慢且精度无法保证;倾角传感器不能直接测量斜面上的倾角大小;加速度传感器测量得到的是传感器轴向与重力方向上的夹角,得不到整个斜面的倾角;较新的有激光倾角测量仪,价格较贵且只能用于斜面倾角的测量[9]。综合考虑在雷达调平系统中选择双轴倾角传感器,由于在测量过程中得到的是待调整平面上两个方向上的倾角,而不是直接测量待调整平面与水平面的二面角[10],因此必须研究直接测得的方向倾角与待调整平面水平度之间的关系,并在此基础上恰当地选择传感器的精度。
1 平面倾角的测量
假定待调整面S1与水平面S的夹角为β,如图1所示。倾角传感器在待调整面内测量AB和AC两个方向的倾角,假设此两个方向的水平倾角分别为α1、α2。Q为A点在水平面S上的投影,即AQ⊥S。AB和AC的夹角为γ,如图2所示。

图1 二面角测量与转换
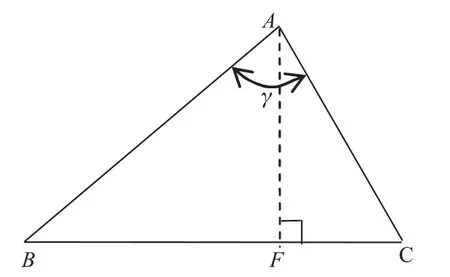
图2 待调整面内的几何关系

2 夹角β的测量误差分析
2.1 倾角α1、α2的误差对β的影响
假定α1、α2均接近0°,由式(1)可得
一般测量方向为正交布置[11-12],即γ=90°,取α1= α2=α,可得

设α1、α2与0°的误差为Δα,则α1、α2引起的β角误差均为

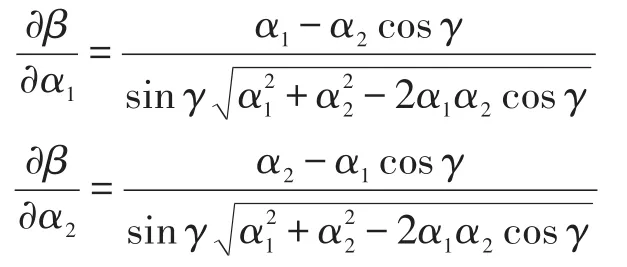
2.2 测量方向夹角γ对β的影响
考察倾角传感器的制造误差在±Δγ范围内变化时,对β角的影响。由式(1)可得

当采用二维倾角传感器时,一般取γ=90°,即
当α1=α2=Δα时,有

比较式(3)和式(4)可知,若倾角α1、α2接近零度,当γ角在90°附近变化较小时,γ角对β的影响是α1、α2的高阶无穷小,故可以忽略不计。参照上式,并根据微小误差取舍原则[13],当Δγ小于1/3(单位与Δα相同)时,其对倾角误差的影响可以忽略不计。
2.3 传感器测量精度分析及误差的合成
如前所述,γ角的误差对β的影响可以忽略,故仅考虑α1、α2的影响。影响倾角α1、α2的因素有:倾角传感器的示值误差、示值稳定性和温度变化引起的零点漂移[14]。传感器示值误差是其测量示值与对应输入量的真值之差,代表着整个误差中的系统误差分量;示值稳定性表示了测量误差中的随机误差。由于大部分倾角传感器均具有温度补偿功能,即通过对被测目标参量的检测值和当前温度测量值的智能处理,可得到检测目标参量的精确值[15],故温度变化引起的零点漂移误差可以忽略不计。
通过对传感器基本特性的研究,发现倾角传感器的测量精度与以下指标密切相关[16]:①灵敏度误差:取决于敏感器件的自身特性,但同时与频率响应有关,根据实际经验,其对灵敏度的影响很小,可忽略不计;②零点偏置:取决于敏感器件的自身特性,是指传感器在零输入的情况下输出不为零,实际的输出值就是零点偏置;③非线性:传感器实际输入总有非线性存在,实际应用中通过后续处理进行校正。校正点越多,非线性越好。④横轴误差:是指当传感器在垂直于其灵敏轴方向上施加一定的加速度或倾斜一定的角度时耦合到传感器输出信号上所产生的误差,如图3所示。⑤允许输入轴不重合度:是指传感器在实际安装过程中所能允许的水平安装偏差,其包含输入轴非对准性和垂直轴非对准性两个方面的误差,如图4所示。⑥重复测量精度:取决于敏感器件的自身特性,无法通过后续的修正方法来改善。
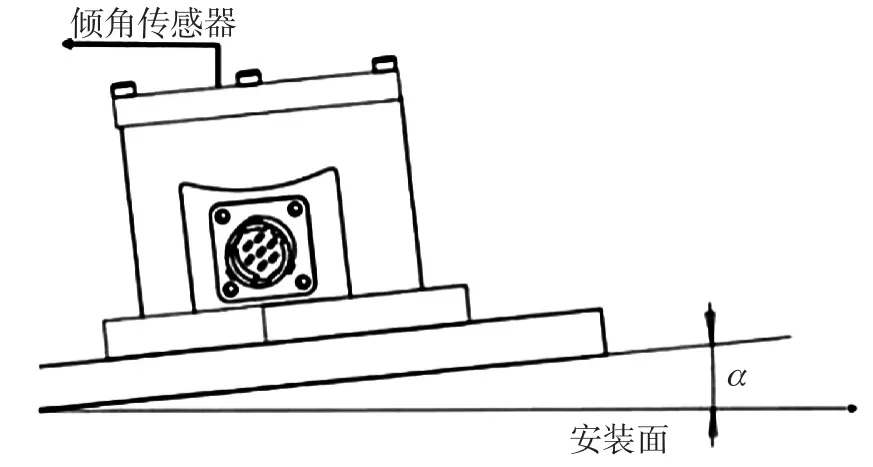
图3 横轴误差
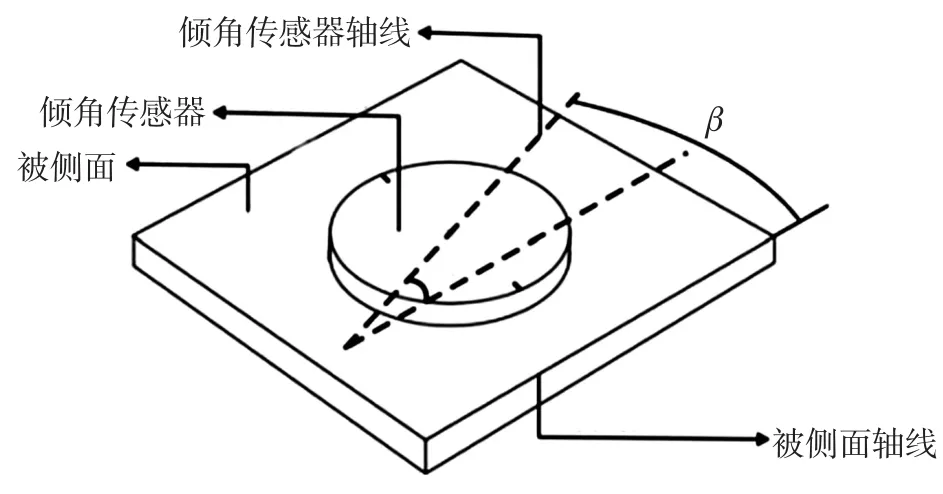
图4 轴不对准现象
由此可见,在倾角传感器具有自动温度补偿的情况下,系统误差包含了灵敏度误差、零点偏置和重复性误差,不能进行修正和补偿;随机误差则包含了横轴误差、输入轴不重合度和非线性,可以通过修正和补偿措施来提高。
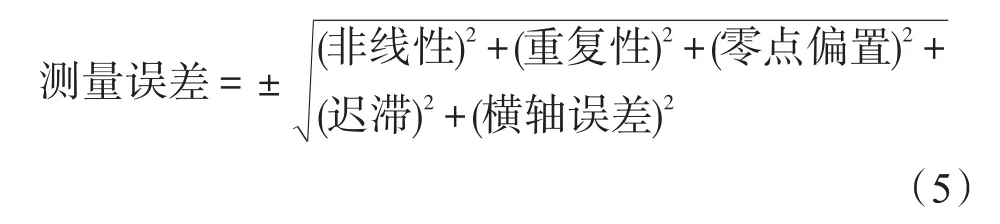
因此,倾角传感器误差应该由重复性、迟滞、零点偏置、非线性及横轴误差等系统误差和随机误差共同组成,综合每一项误差可合成最终的测量误差为:
综上所述,假设最终综合得出的示值误差为δα,示值稳定性值误差为δt,根据误差合成原理可得β的极限误差为:
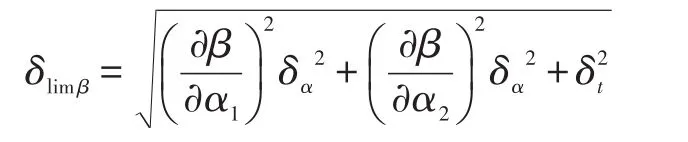
即由(2)式可得

3 调平判断准则与传感器参数的确定
当γ=90°时,取α1=α2=α,由式(1)得
设β为平台水平度允差,当

时,满足调平条件,因此上式可作为平台是否达到调平要求的判断准则。
为节约成本,在实际应用中应尽量选用较低精度的传感器,当α=0时,δlimβ可取得最大值,此时
即倾角传感器的示值误差和示值稳定性必须满足

此即为选择传感器精度参数的依据。
4 结论
二维正交倾角传感器的测量方向夹角误差对倾角的测量误差影响微小,在选用或安装传感器时无需有过高要求;水平精度的测量误差取决于倾角传感器的示值误差和示值稳定性;对示值误差和示值稳定性的最低要求是其合成极限误差等于水平度允差。
本文通过误差分析和数据处理理论对调平的测量误差和传感器误差及其精度选择进行了研究,同时利用理论分析得到了在实际应用中传感器精度参数选择的依据。这将为在调平系统设计中选择传感器提供参考,下一步工作主要通过软硬件设计和实验验证的方法检测传感器的测量性能参数,将实验测得的倾斜角度值与公式(1)中计算得到的理论值进行对比,验证测量方法及数据的可行性;针对可以修正和补偿的随机误差,运用功率谱密度、自相关分析、Allan方差等方法对其进行处理和分析[17],逐步提高传感器精度。由于篇幅限制和精力有限,通过实验验证传感器测量精度的工作将在后续的工作中完善。
[1]Steward D.A Platform with Six Degrees of Freedom[C]//Proceed⁃ing of Institute of Mechanical Engineering.1965,180(15):371-386.
[2]李勇建,魏贵玲,邓劲松,等.自动调平技术研究[J].压电与声光,2010,32(6):949-950.
[3]李波,李志有,曲颖.某雷达天线升降调平机构设计[J].中国新技术新产品,2014(2):70-71.
[4]周春燕.基于PLC的自动调平控制系统研制[D].西安:西安电子科技大学机电工程学院,2010:1-9.
[5]马洪连,郑保重,王伟.基于MEMS技术倾角测量系统的设计与实现[J].仪器仪表学报,2005,26(8):185-187.
[6]崔建伟,廖启征,郭磊.基于ARM微控制器的动态倾角传感器设计与制作[J].仪表技术,2007(9),63-65.
[7]张维胜.倾角传感器的原理和发展[J].传感器世界,2002(7):18-21.
[8]田小芳,陆起涌,熊超.基于加速度传感器的倾角仪设计[J].传感技术学报,2006,19(2):361-363.
[9]袁浩浩,张联盟.一种新的斜面倾角和倾角方位的测量方法[J].自动化仪表,2013(10):86-88.
[10]Su Yan-ping,Gong Mao-fa,An Bin,et al.Design of Tilt Angle Measurement System Based on ADXL345 Sensor[J].Journal of Measurement Science and Instrumentation,2014(2):19-22.
[11]佟刚,王涛,吴志勇,等.高精度倾角传感器在测量车载平台变形中的应用[J].光学精密工程,2010,18(6):1347-1353.
[12]刘爱华,李邓化,董必政.高精度双轴倾角检测装置的设计与实现[J].北京信息科技大学学报,2013,28(5):51-55.
[13]吴石林,张玘.误差分析与数据处理[M].北京:清华大学出版社,2010:97-107.
[14]于娜,刘志远,赵佳龙.倾角传感器的温度补偿研究[J].传感器与微系统,2014,33(10):14-16.
[15]张朝龙,江巨浪,李彦梅,等.基于云粒子群—最小二乘支持向量机的传感器温度补偿[J].传感技术学报,2012,25(4):472-477.
[16]周四春,吴建平,祝忠明,等.传感器技术与工程应用[M].北京:原子能出版社,2007:9.
[17]宋海宾,杨平,徐立波.MEMS传感器随机误差分析及处理[J].传感技术学报,2013,26(12):1719-1723.

芝世磊(1991-),男,甘肃临夏人,本科毕业于西安交通大学,现为军械工程学院硕士研究生,研究方向为机械制造及自动化,1102907358@qq.com。
Analysis of Measurement Errors on Leveling and the Selection of Tilt Sensor Accuracy
YANG Runze1*,ZHI Shilei1,LÜ Bo2
(1.Mechanical Manufacturing and Automation Lab,Ordnance Engineering College,Shijiazhuang 050003,China;2.Air Warning Radar Lab,Ordnance Engineering College,Shijiazhuang 050003,China)
In order to reduce the error of leveling and choose sensor with appropriate accuracy,tilt angle measure⁃ment is taken as research object in this paper.Firstly,the relation formula between the angle of platform inclination and directional measurement angle is derived through analysis and calculation,then measurement error is emphasis⁃ly analyzed and processed with mathematical and error combination theory.Finally,based on the analysis of con⁃crete errors including system errors and random errors,the judgment standard of platform leveling and the parame⁃ter selection of sensor are put forward in practical application according to the permissible error of levelness,and lay the foundation for continued testing.
leveling;tilt sensor;error analysis;data processing;measurement accuracy
TP212
A
1004-1699(2015)10-1482-04
��7230
10.3969/j.issn.1004-1699.2015.10.011
2015-05-07 修改日期:2015-07-31
猜你喜欢
纺织标准与质量(2022年4期)2022-09-05
纺织标准与质量(2022年1期)2022-07-12
中学生数理化·八年级物理人教版(2021年12期)2021-12-31
机械工程与自动化(2020年4期)2020-08-25
应用数学(2020年2期)2020-06-24
机械制造(2020年1期)2020-03-04
质量技术监督研究(2018年1期)2018-03-26
中国公路(2017年11期)2017-07-31
航天工业管理(2017年4期)2017-05-12
光学精密工程(2016年4期)2016-11-07