基于偏置力矩的双电机消隙智能PID控制
2015-11-27 05:31刘攀玲张光辉
火炮发射与控制学报 2015年2期
刘攀玲,张光辉,刘 妙,贾 强
(西北机电工程研究所,陕西 咸阳 712099)
在火炮伺服系统中,存在许多影响其控制性能的非线性因素,如齿隙、弹性形变等。齿隙对火炮伺服系统的影响最大,严重降低了系统的动态性能和稳态精度;并且齿轮之间因齿隙的存在发生刚性碰撞,使系统产生振荡和噪声[1-2]。因此,克服齿隙对于提高火炮伺服系统的射击精度和稳定性具有重要意义。
为了克服齿隙对系统的影响,研究人员作了很多研究,大多都以单电机为研究对象,通过各种控制手段尽量给予补偿,但不可能完全消除齿隙;或者采用比如自适应控制、滑模变结构控制等设计过程比较复杂的控制方法,但这些控制方法不利于工程实践[3],而双电机驱动则为完全消隙提供了可能。
采用双电机驱动,一方面满足大功率需求;另一方面主要用于消除齿隙非线性。位置控制器采取智能PID 控制算法,对积分机理进行了改进,使系统跟踪精度提高的同时仍具有较好的动态性能。
1 双电机消隙原理
双电机消隙伺服系统由两台物理参数完全一样的电机分别通过相同的减速器共同驱动负载,如图1所示。主电机与从电机的电流环指令信号并联,保留各自的电流环。主电机的速度环保留,从电机的速度环断开。电流环和速度环是内环,当其内部的某些参数发生变化或受到干扰时,电流反馈与速度反馈能起到抑制作用。位置环采用全闭环,即把位置传感器安装于火炮传动链末级的座圈上,实现对火炮身管的高精度测量。位置环是外环,主要保证系统的稳态精度和动态跟踪性能,直接关系到伺服控制系统的稳定性与高性能运行。

为了消除齿隙,给两个驱动电机分别施加大小相等,方向相反的偏置电流,偏置电流产生的偏置力矩使两个小齿轮紧卡大齿轮,使得大齿轮没有自由转动的空间。基于这个原理,可以给系统施加一个常偏置电流,产生预紧力,在电机启动或换向时由于预紧力的存在消除了齿隙。但这种方法造成系统功率损耗,不经济。针对这个缺点,可以根据系统所处不同的运动状态来施加偏置电流,具体做法是通过速度控制器的输出来决定何时加入偏置力矩。此时,两个电机的输出力矩Tm与速度控制器的输出gs的关系如图2所示。

当系统上电,但输入信号gs=0时,由图2中0点知两电机输出大小相等方向相反的力矩,即偏置力矩,使得两个小齿轮分别和大齿轮的异面啮合,这样无论电机驱动负载朝哪个方向运动,都不存在齿隙。当系统输入信号gs≠0时,下面分析gs>0时的情况。
1)当gs≥g1时,偏置力矩T=0,此时Tm1=Tm2,两个电机共同驱动负载。
2)当g0≤gs<g1时,偏置力矩以一定的斜率逐渐增大,一正一负作用到两个电机上。施加在电机1上的偏置力矩与控制器输入力矩方向相同,施加在电机2上的偏置力矩与控制器输入力矩方向相反,因此Tm1增大,Tm2急剧减小,当电机2输出力矩不能使电机2维持原速时,小齿轮2的齿就会离开大齿圈而进入齿间空隙,此时由电机1单独驱动。
3)当0<gs<g0时,偏置力矩达到最大值,即T=Tmax,Tm1和Tm2逐渐减小为0,电机2的齿已经紧贴大齿轮齿的右边,两个小齿轮卡住大齿轮,消除了齿隙。此时,电机1 正向驱动,电机2 反向驱动。
4)当gs在0位置附近时,偏置力矩T=Tmax,电机不断地在电机1正向驱动、电机2反向驱动和电机1反向驱动、电机2 正向驱动间运行,直到瞄准目标为止。
gs<0的情况与gs>0时类似。
2 基于偏置力矩计算的智能PID控制
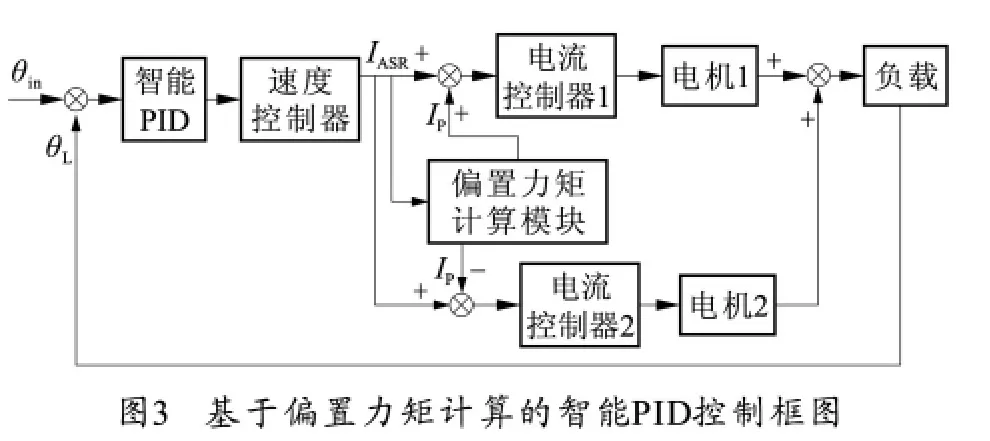
基于偏置力矩计算的智能PID 控制框图如图3所示。主要包括偏置力矩计算模块和智能PID 控制器。偏置力矩计算模块用于产生偏置力矩消除传动链中齿隙非线性,提高系统控制精度。智能PID 控制算法对积分机理进行了改进,减小了滞后,积分作用增强,用以提高伺服系统的跟踪精度。两种控制方法相结合能提高系统的控制性能。
2.1 偏置力矩计算模块设计
偏置力矩产生的时刻以及大小是根据速度控制器的输出来决定,其关系曲线如图4所示。图4中横坐标为速度控制器的输出,即图3中偏置力矩计算模块的输入;纵坐标为系统提供的偏置力矩,即图3中偏置力矩计算模块的输出Ip作用到两个电机所产生的力矩。将图4中T-gs关系曲线用Matlab编写成S函数放入图3偏置力矩计算模块中,其输出一正一负加到系统电流环主令输入端,使电机中产生偏置力矩,达到消除齿隙的目的。
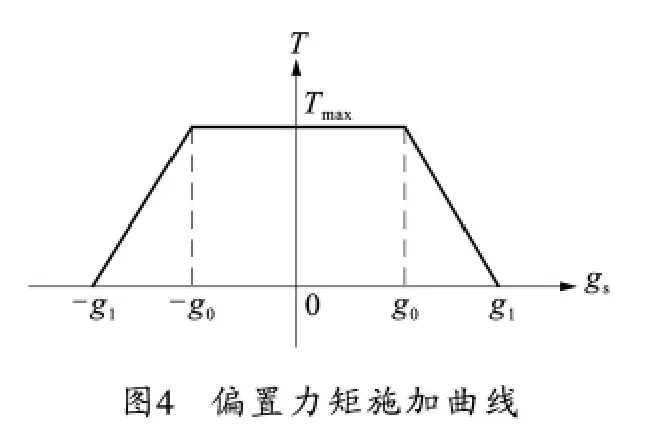
图4中,Tmax为偏置力矩的最大值,是有待设置的一个常值;-g1、-g0、g0和g1是偏置力矩变化处所对应的速度环的输出值,也是有待设置的常值。
2.2 智能PID控制器设计
智能PID 控制算法根据系统误差e和误差的导数的符号来决定加入积分的时刻和大小。当e与的符号相同时,系统的误差趋于增大,应加强积分;符号相异时,系统的误差趋于减小,应减弱积分。因此,以误差和误差变化率这两个状态特定值作为判别条件,便可形成智能积分的判断、决策和控制准则。这种智能积分已是非线性的环节,减小了滞后,积分作用增强,用以提高伺服系统的跟踪精度[4-5]。
1)积分规则
a)按误差e绝对值的大小进行分段,设置误差区间[-a,+a]。
b)设置与误差区间相应的误差变化率的绝对值的判定值b。
c)设置正向积分系数Kdi;反向积分系数为Kdi/p。
d)积分的正、反向以及大小均取决于误差所在的区间和误差变化率的大小。
2)智能PID 控制算法实现
图3中智能PID 控制器输出为:

式中:e(k)=θin-θL;S(k)为积分累加值;Kp为比例系数;Ki为积分系数;Kd为微分系数。
结合智能PID 的积分规则,将上式中积分项S(k)定义如下:

3 仿真
通过Matlab/Simulink对基于双电机消隙技术的火炮伺服系统进行仿真[6],仿真结果对比无偏置力矩时的情况。
智能PID 控制算法的参数选取如下:Kdi=50;ai=30;bi=0.2;p=5。双电机消隙模块中偏置力矩的参数选取如下:Tmax=18;g0=20;g1=26。
1)输入主令为θ(t)=2 800mrad的阶跃信号。在同一控制器参数下,由图5知系统均无明显的超调。
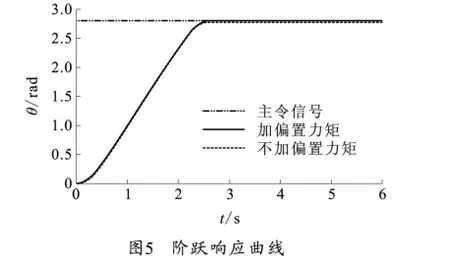
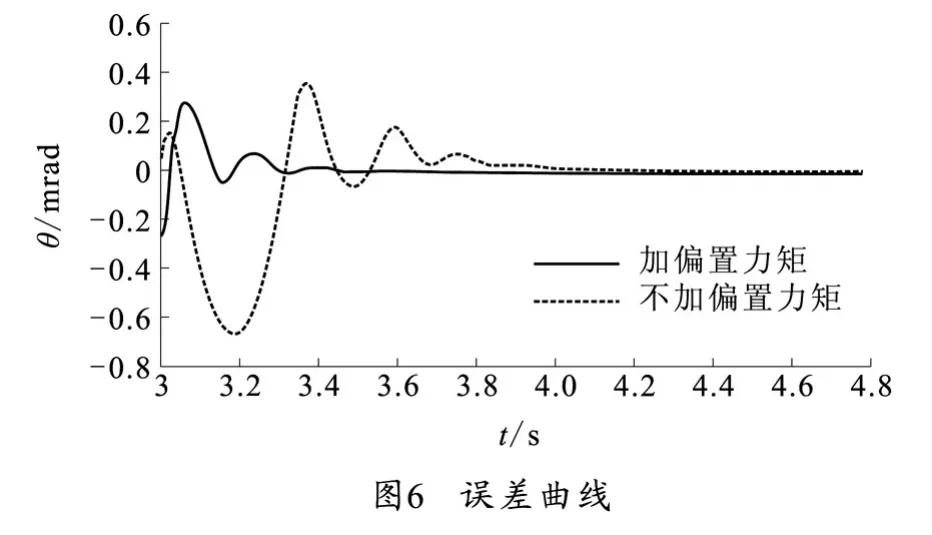
由图6可知,无论有否偏置力矩,系统的精度均满足要求,都能达到0.1mrad。但在加偏置力矩时系统响应速度较快,稳定时间在3.2s左右,而不加偏置力矩时系统稳定时间在3.6s左右。
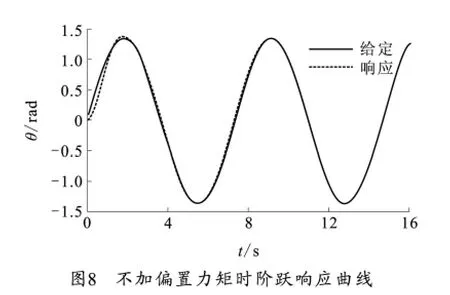
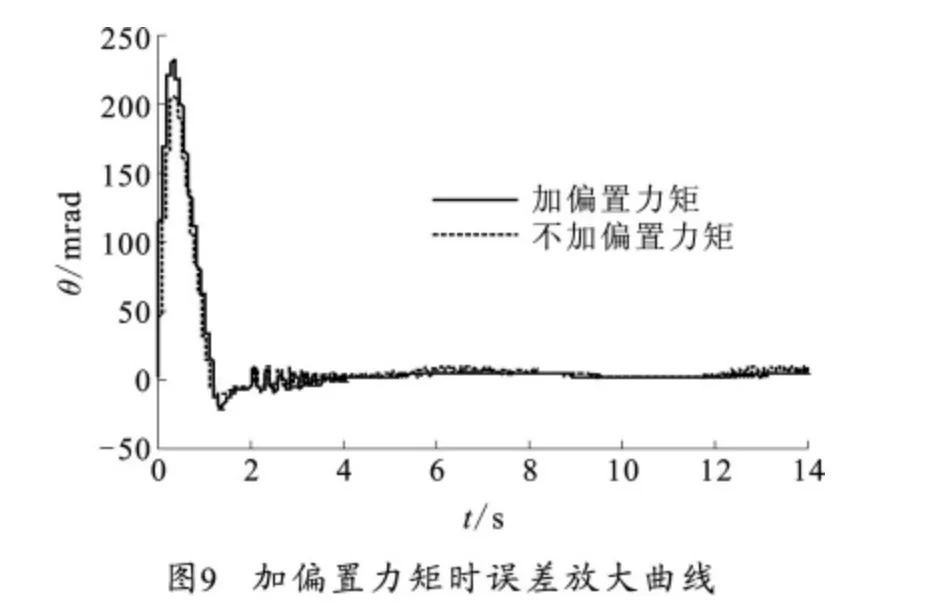
2)输入主令为θ(t)=1 333sin 0.86t的正弦信号。在同一控制器参数下,由图7和图8可知,系统都能跟踪上;由图9可知,加偏置力矩时跟踪精度为3mrad左右,比不加偏置力矩时提高1 mrad左右。

4 结论
针对系统中存在的齿隙非线性,笔者将双电机消隙技术与智能PID 控制相结合,构造了基于偏置力矩计算的双电机消隙智能PID控制方法。偏置力矩以动态的形式分别加到两个电流环主令输入端,使两个电机中产生偏置力矩,达到消除齿隙的目的。仿真结果表明,该控制方法能有效克服齿隙非线性对系统的影响,保证系统的跟踪精度与动态性能。
(References)
[1]董轩.机械传动系统中齿隙的非线性研究[D].西安:西安电子科技大学,2009.DONG Xuan.Backlash nonlinear research in the mechanical transmission system[D].Xi’an:Xi’an Electronic and Engineering University,2009.(in Chinese)
[2]忽麦玲,张光辉,卫平,等.双电机驱动伺服系统的建模与分析[J].火炮发射与控制学报,2008(2):93-96.HU Mailing,ZHANG Guanghui,WEI Ping,et al.Modeling and analysis of double motor drive servo system[J].Journal of Gun Launch and Control,2008(2):93-96.(in Chinese)
[3]赵海波,周向红.双电机驱动伺服系统的反推自适应控制[J].控制理论与应用,2011,28(5):745-751.ZHAO Haibo,ZHOU Xianghong.Backstepping adaptive control of dual-motor driving servo system[J].Control Theory and Applications,2011,28(5):745-751.(in Chinese)
[4]陈明俊,李长红,杨燕.武器伺服系统工程实现[M].北京:国防工业出版社,2013.CHEN Mingjun,LI Changhong,YANG Yan.Engineering practice of weapon servo system[M].Beijing:National Defense Industry Press,2013.(in Chinese)
[5]李匡成.坦克炮控系统齿隙非线性建模与补偿控制策略分析[J].微特电机,2010(6):45-48.LI Kuangcheng.Modeling and compensation control analysis of backlash nonlinearity in gun control system of tanks[J].Small and Special Electrical Machines,2010(6):45-48.(in Chinese)
[6]安树,陈永利.基于SIMULINK 的高炮随动系统仿真研究[J].测试技术学报,2010,24(6):507-510.AN Shu,CHEN Yongli.Simulation of gun servo system based on SIMULINK[J].Journal of Test and Measurement Technology,2010,24(6):507-510.(in Chinese)
猜你喜欢
建材发展导向(2022年18期)2022-09-22
汽车实用技术(2022年15期)2022-08-19
北京航空航天大学学报(2022年6期)2022-07-02
中国信息化(2022年5期)2022-06-13
电子制作(2017年13期)2017-12-15
山东青年(2016年12期)2017-03-02
北京航空航天大学学报(2016年6期)2016-11-16
航天制造技术(2016年6期)2016-05-09
航天制造技术(2016年6期)2016-05-09
航天制造技术(2016年6期)2016-05-09