单自由度磁悬浮轴承的干扰抑制*
2015-11-23 03:05孙启国苗定豪
机械研究与应用 2015年2期
孙启国,苗定豪
(北方工业大学机械与材料工程学院,北京 100144)
0 引言
磁悬浮轴承是利用电磁力使轴承稳定悬浮且轴心位置可由控制系统控制的一种新型轴承。与其他轴承相比,它具有转速高、寿命长、无需润滑、性能可控、环境适应性好等特点。基于这些优良的品质,磁悬浮轴承被越来越多地应用于机械加工、航空航天、真空技术等领域。
对于磁悬浮轴承控制中的干扰抑制问题,在经典控制理论中,往往通过增大裕度的方式实现[1-3]。PID控制是一种常用的控制手段,但PID参数的整定是很困难的[4]。实际上,干扰的统计特性一般是无法预知的。
遗传算法是基于“适者生存”的一种高度并行、随机和自适应的优化算法,涉及到初始种群、编码、适应度函数、解码等技术,具有隐含并行性和全局解空间搜索的特点[5],被许多控制系统所采用[6]。Matlab是做系统设计的强有力工具,Simulik是Matlab的一个组件。使用Simulink可以直观地进行系统建模与系统仿真。使用Matlab做控制器设计具有简单、迅速、可视化等特点。
笔者试图基于Simulik这一仿真平台,用遗传算法来设计单自由度磁悬浮轴承控制器,以期实现对干扰的抑制。
1 单自由度磁悬浮轴承的动力学模型
差动磁悬浮轴承工作原理是[1]:假设转子是刚性的,其质量是均匀的,运行过程中转子的重心与形心始终重合,所有的电磁铁具有相同的工作参数。在偏磁电流I0的作用下,转子处于平衡位置。以平衡位置为坐标原点,假设某一时刻扰动fd使转子偏离平衡位置,向下偏距为|y|。为使轴承能回到原来的平衡位置,必须加一个控制电流iy,使电磁铁3的电磁力增加,电磁铁4的电磁力减小。图1是差动磁悬浮轴承的工作原理示意图。

图1 单自由度差动磁悬浮轴承的工作原理
图1 中转子的动力学方程可描述为:

电磁铁绕组的电压u与控制电流 iy的关系为[3]:

2 遗传算法整定的PID控制器
2.1 仿真参数
笔者仿真参数根据北方工业大学车辆工程实验室磁悬浮转子试验台设定为:
m=2.58 kg,C0=4×10-4m,I0=2.5 A,μ0=4π×10-7H/m,N=76 匝,ki=33.6 N/A,ky=1.91×105N/m,L0=2.44×10-3H,R=8 Ω,A=2.69×10-4m2,k1=7.6 V/mm,k2=0.625 A/V。
2.2 基于遗传算法整定的PID控制器
设计PID控制器,如式(3):

式中:偏差 e(t)=u-7600y。
在Simulink环境下,搭建了包含PID控制器的单自由度磁悬浮轴承仿真系统,如图2所示,图3为遗传算法原理图。
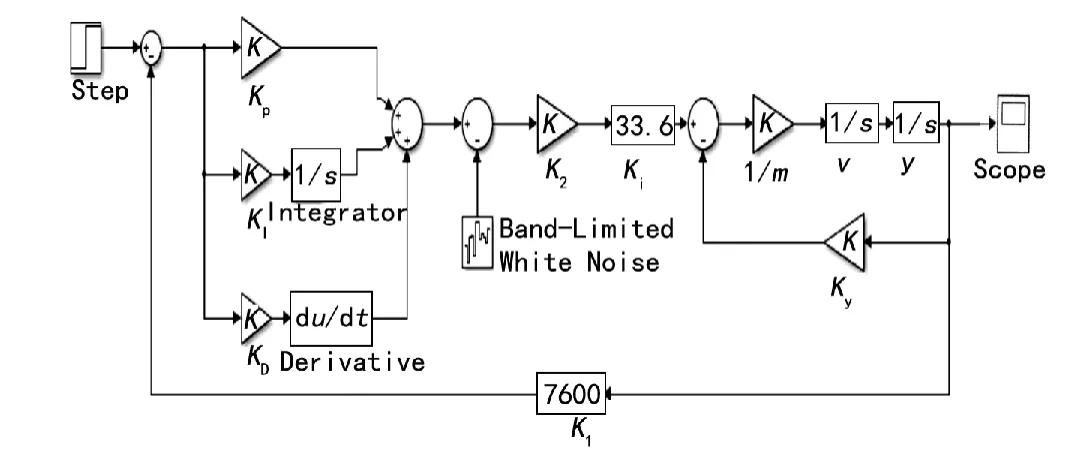
图2 单自由度磁悬浮轴承仿真系统

图3 遗传算法原理图
根据图3,遗传算法整定PID参数过程可描述为;
(1)对参数 Kp、Ki、Kd进行二进制编码。
(2)选取初始种群(文中初始种群为50)。
(3)编写适应度函数(文中用偏差值作为适应度的评价指标)。
(4)遗传算法操作(新种群的复制、交配、基因突变等)。
(5)进行适应度评价,直到找到最优解。
根据经验整定的一组PID参数为:Kp=2.5,Ki=50,Kd=3.3×10-3;根据遗传算法整定的一组 PID 参数为:Kp=9.4208,Ki=0.0519Kd=18.4987×10-3。对应以上两组参数在无干扰及不同程度干扰情况下的单位阶跃响应的仿真结果如图4~5所示。
由图4可知,与经验整定的PID控制器相比,遗传算法整定的PID控制器引起的稳态输出下降了10.95%,但超调量下降0.55%,调整时间缩短了96%。噪声功率为P时,两种控制器输出结果与无干扰时的输出结果基本相近。该结果表明,小功率噪声时,两种方式整定的PID控制器对于该噪声的抑制都比较好,但经验整定PID控制器输出的毛刺较多。

图4 系统在无干扰和干扰功率功率时的输出
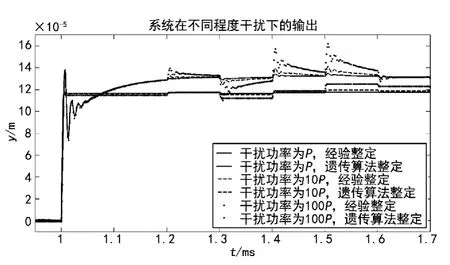
图5 系统在不同程度干扰下的输出
由图5可知,噪声功率为10P时,经验整定的PID控制器稳态输出的波动幅度为1.52×10-5m,而
2 结语
智能化水果采摘机由于控制系统的设计仍然不能满足水果采摘过程中的需求,造成我国对于智能化水果采摘机发展水平不高的困境。因此,此控制系统的设计在结合以前设计的不足对识别、检测、控制以及通信功能都进行一定的优化设计,能够满足在水果采摘过程中实现对水果的识别、采摘、分类、装箱等一系列功能,成为我国未来整个水果种植业机械化发展的一个重要前提,为我国实现机械化、智能化农业提供一个较好的发展方向。
[1] 王丽丽,郭艳玲,王 迪,等.果蔬采摘机器人研究综述[J].林业机械与木工设备,2009,37(1):10-12.
[2] 毛罕平,李明喜.基于多源机器视觉信息融合的番茄目标匹配[J].农业工程学报,2009,25(10):142-147.
[3] 周 俊,姬长英.农业机器人视觉导航中多分辨率路径识别[J].农业机械学报,2003,34(6):120-123.
[4] 方建军.采摘机器人开放式控制系统设计[J].农业机械学报,2005,36(5):83-86.
猜你喜欢
计算机仿真(2022年8期)2022-09-28
小猕猴智力画刊(2022年4期)2022-05-23
赤峰学院学报·自然科学版(2021年10期)2021-11-11
小学科学(学生版)(2021年4期)2021-07-23
中学生数理化·八年级物理人教版(2017年6期)2017-11-09
中学生数理化·七年级数学人教版(2017年6期)2017-11-09
中学物理·高中(2016年11期)2016-12-15
中国塑料(2016年11期)2016-04-16
考试周刊(2015年68期)2015-09-10
教育与职业(2014年16期)2014-01-19