
交叉口直行待行区时空资源集成优化模型
2015-11-22 11:45:56顾佳磊
上海理工大学学报 2015年4期
刘 梅, 韩 印, 顾佳磊
(上海理工大学 管理学院,上海 200093)
随着城市与社会经济的不断发展,汽车保有量大幅增加,交通拥堵现象愈发严重.然而,道路资源有限,通过新建道路等方式无法解决交通问题,只有从有限的道路资源入手,进行道路交通精细化管理,提高道路资源利用率,才能有效缓解交通拥堵问题.
信号控制交叉口的时空优化设置对缓解交叉口拥堵具有重要意义.信号配时优化[1-3]是通过优化交叉口时间资源提高交叉口通行能力、解决交通拥堵的常见方式.近年来,许多城市交叉口开始把目标从拓宽进口道转移到优化交叉口渠化上来,在交叉口内部设置了左转待行区和直行待行区.设置待行区的目的是为使部分左转或直行车辆在直行或左转相位启亮前提前进入交叉口待行,从而充分利用所属相位的绿灯时长,增加一个周期内通过的车辆数,降低车辆排队长度.文献[4-7]探讨了左转、直行待行区的设置方法、条件、形式、交通组织方法及其对交叉口通行能力的影响;江颖[8]提出了待行区设置下修正的通行能力计算公式,为信号交叉口待行区设置后产生的效益提供了理论依据;Yang等[9-10]通过VISSIM 仿真建模对设置左转待行区的信号交叉口的道路通行能力和服务水平进行了评价,验证了设置左转待行区能够增加左转车道的通行能力,且与左转待行区的大小成正比.王殿海、李丽丽等[11-12]给出了设置左转待行区的几何临界条件并利用交通流波动理论和累计曲线方法建立了左转车辆排队模型.但通过实地观察发现,待行区设置后会导致车辆二次起动-停车,车辆低速驶入待行区并怠速等待,造成车辆油耗及尾气排放的增加.因此,有必要深入研究待行区设置后的交通运行效益与环境效益.
本文以交叉口直行待行区为研究对象,探讨直行待行区的设置条件及其利弊,分析直行待行区设置前后直行进口道车辆运行特征.针对直行待行区设置后会增加车辆二次起动-停车而造成的车辆油耗及尾气排放增加等问题,提出一种以车辆排队长度最短、直行进口道通行能力最大、车辆平均停车率最小为优化目标的交叉口直行待行区时空资源集成多目标优化模型,综合权衡直行车辆的交通运行效益与环境效益.
1 直行待行区的设置条件及车辆运行特征
1.1 直行待行区的设置条件及利弊分析
直行待行区设置的基本思路是:在相邻相位的左转绿灯启亮后,部分直行车辆进入直行待行区,使得直行绿灯相位时间内通过的车辆数有所增加.其设置目的是为了充分利用交叉口的空间资源,设置原则是不影响其它方向的车辆通行,避免冲突.直行待行区的设置条件如下:
a.交叉口面积较大且直行车流比例高,最好是干道相交的交叉口;
b.至少为四相位交叉口,且各个进口道须设置左转专用车道;
c.交叉口各进口道坡度需水平,且各进口道路面渠化程度高,道路标志标线清晰.
通过上述理论分析与实际工程应用情况反馈,设置直行待行区能提高直行进口道通行能力,降低直行车道车辆排队长度,充分利用交叉口空间资源,一定程度上能缓解交叉口拥堵.但设置直行待行区后会导致车辆二次起动-停车,一定程度上增加了直行车辆停车次数、车辆油耗,加重了车辆磨损及尾气排放.
1.2 直行待行区设置前后车辆运行特征
直行进口道未设置直行待行区时,直行车辆在本相位红灯时排队等待,绿灯启亮时直行车辆起动、加速与消散,车辆运行如图1(a)所示.当设置直行待行区后,直行车辆在红灯时排队等待,当相交道路左转专用相位绿灯启亮时,且直行待行区指示屏允许直行车辆驶入待行区时,直行车辆二次起动驶入待行区;当直行专用相位绿灯启亮时,直行车辆起动、加速与消散,此时直行车辆的整个运行过程如图1(b)所示.
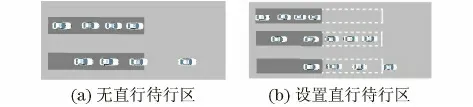
图1 直行待行区设置前后直行车辆运行特征Fig.1 Running characteristics of vehicles before and after the setting of waiting-area
设置直行待行区后,虽然红灯时直行车辆排队长度有所降低,但直行车辆经历了二次起动-停车,造成了负面的交通环境影响,因此有必要优化交叉口直行待行区时空资源,确定直行待行区最优长度.根据直行车辆到达率大小确定是否开启直行待行区指示屏,允许直行车辆进入直行待行区,直行相位绿灯时间是否需要减小,综合协调直行车辆的交通运行效益与环境效益,上述即是本文需要重点研究与解决的问题.
1.3 设置直行待行区后的行人二次过街
以图2—3中的典型十字交叉口为例,当设置直行待行区后,行人需要二次过街才能通过交叉口.
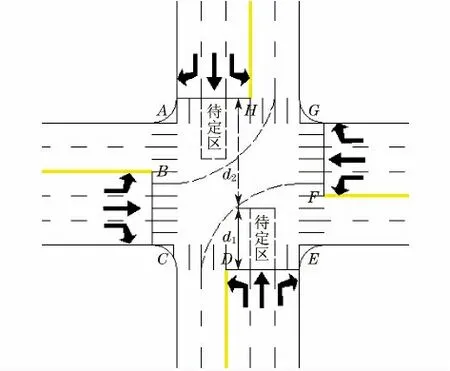
图2 交叉口布局Fig.2 Plan layout of isolated intersection
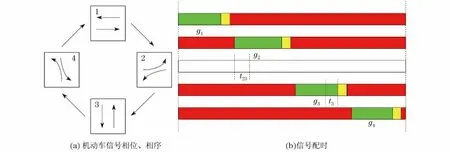
图3 交叉口信号相位、相序与配时Fig.3 Signal phase,sequence and timing of isolated intersection
图2中,点A—H 为行人过街的等待位置;d1为直行待行区长度(第一停车线至第二停车线的距离),m;d2为第二停车线至交叉口出口道的距离,m.图3中,相位1 为东西向直行专用相位;相位2为东西向左转专用相位;相位3为南北向直行专用相位;相位4为南北向左转专用相位;gi为第i相位的绿灯时间,s;t23为直行待行区指示屏启亮控制参数,当t23=1时,直行待行区指示屏与相交道路左转相位同时启亮,允许直行车辆驶入直行待行区,当t23=0时,此时交通流检测器检测到直行车辆到达率较小,故直行待行区指示屏在此周期内不启亮,即此周期内不放行直行车辆驶入直行待行区;t3为由于直行待行区指示屏启亮引起的直行车辆消散时间减少而减少的直行相位绿灯时间.
相位1 绿灯启亮时,行人交通组织为:A 到H到G、C 到D 到E(反向亦行);相位2绿灯启亮时,南北向直行车辆驶入直行待行区,此时行人交通组织为:A 到B、E 到F,而A 无法到H、E 无法到D;相位3绿灯启亮时,行人交通组织为:A 到B 到C、E 到F 到G;相位4绿灯启亮时,行人交通组织为:B 到C、C 到D、G 到H、F 到G.
2 直行待行区时空资源集成多目标优化模型
2.1 基本假设与思路
以图2中的交叉口为例,构建交叉口直行待行区时空资源集成多目标优化模型.该交叉口采用传统四相位固定信号配时,信号相位、相序及配时如图3所示.
根据本文研究特点,作出以下基本假设:
a.以图2中南进口单直行道及其直行待行区为重点研究对象(相位3),暂不考虑整个交叉口;
b.当各相位车辆到达率qi(pcu/h)确定后,信号周期长度TC确定并保持不变;
c.绿灯时间g1,g2保持不变,允许设置直行待行区后直行相位绿灯时间g3减少,减少时间为t3.
在q1,q2,q4保持不变的情况下,当直行车辆到达率q3较大时,为提高直行进口道交通运行效率,应使车辆排队长度尽可能小、直行进口道通行能力尽可能大,此时d1应增加,t23=1,t3应减小;而当直行车辆到达率q3较小时,应尽可能降低车辆停车率,侧重降低交叉口交通环境污染,此时d1应减小,t23=0,t3应增大.
综上所述,本文构建一种以直行待行区长度d1、直行待行区指示屏控制参数t23及直行相位绿灯减少时间t3为决策变量,以车辆排队长度最短、直行进口道通行能力最大、车辆平均停车率最小为优化目标的交叉口直行待行区时空资源集成多目标优化模型,以此充分协调直行车辆的交通运行效益与环境效益.
2.2 模型构建
直行待行区时空资源集成多目标优化模型的构建采用单目标组合方法,运用各种组合方式将多个目标合成一个新目标,然后通过单目标优化方法来求解,并应用不同的加权系数将各目标函数组合为一个新的目标函数.
2.2.1 车辆排队长度
参考荣建等[13]提出的Signal94排队长度优化模型,根据直行待行区设置后直行车辆的运行特征,将此排队长度优化模型进行改进,表达式为


2.2.2 直行进口道通行能力
根据我国《城市道路设计规范》,一条直行车道的通行能力为

式中,t0为绿灯启亮后,第一辆车起动通过停车线的时间,取2.3s;ti为直行车辆通过停车线的平均时间,取2.5s/pcu;φ 为折减系数,取0.9.
根据直行待行区设置后的车辆运行规律,直行车辆通过交叉口所节省的时间为

式中,T1为车辆从D 点行驶到H 点需要的时间,s;T2为车辆从I点行驶到H 点需要的时间,s;a 为直行车辆平均加速度,取7m/s2.
故设置直行待行区后增加的直行进口道通行能力为
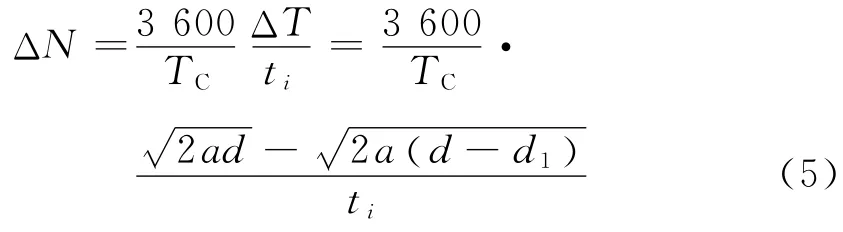
通过上述分析,可以得到设置待行区后直行进口道通行能力为
且当t23=1时,ΔN≠0;当t23=0时,ΔN=0.
2.2.3 平均停车率
交叉口平均停车率是指每辆车的平均停车次数,是一个重要的优化目标,其与交叉口处的燃油消耗和尾气排放有着密切的关系[14].尤其当设置直行待行区后,直行车辆会二次起动-停车,增加直行车辆停车次数与尾气排放,故有必要将平均停车率纳入模型中,作为其优化目标.
Webster[15]通过模拟车辆均匀到达建立了平均停车率的经典计算方法,即
式 中,λ 为绿信 比;y 为 车 流 量 比;g 为 绿 灯 时 间;q为车辆到达率;S 为饱和流量.
当设置直行待行区后,且当直行待行区指示屏指示直行排队车辆进入直行待行区时,直行车辆会经历二次起动-停车过程,故修改直行车辆的平均停车率计算公式为

式中,h3为设置直行待行区后直行进口道车辆平均停车率,次/pcu;λ3为设置直行待行区后直行进口道的绿信比;y3为设置直行待行区后直行进口道车流量比;β 为二次起动-停车系数.通过VISSIM 仿真模拟,设置直行待行区后直行车辆平均停车率比未设置时的直行车辆停车率约多0.3~0.7次,为简化模型与公式计算,取当t23=1 时,β 为1.5;当t23=0时,β 为1.
综上所述,建立直行待行区时空资源集成多目标优化函数及其约束如下,即
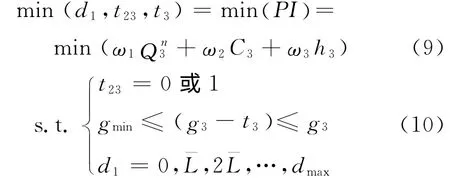
式中,PI为设置直行待行区后交通运行效益与环境效益的综合效益指标;ωk为控制性能指标的权重,行车道的长度;gmin为最小绿灯时间;dmax为直行待行区所能允许设置的最大长度,m,应根据相交道路左转车流行驶轨迹合理安全地确定.
上述集成优化模型属于多变量非线性方程求极值问题,为得到全局最优解,采用穷举法对模型进行求解,求出所有不同直行待行区长度、直行待行区指示屏控制参数及直行相位绿灯减少时间组合下的PI值.其中,PI 值最小的即为三者最优组合,此时直行待行区中的直行车辆的交通运行效益与环境效益达到综合最优.
3 案例分析
3.1 基础交通信息
以图2交叉口为案例,利用VISSIM 微观交通仿真软件对本文所提出的集成优化模型进行有效性分析.表1为交叉口各交通流方向的交通流量、饱和流量、车流量比.
交叉口信号周期长度
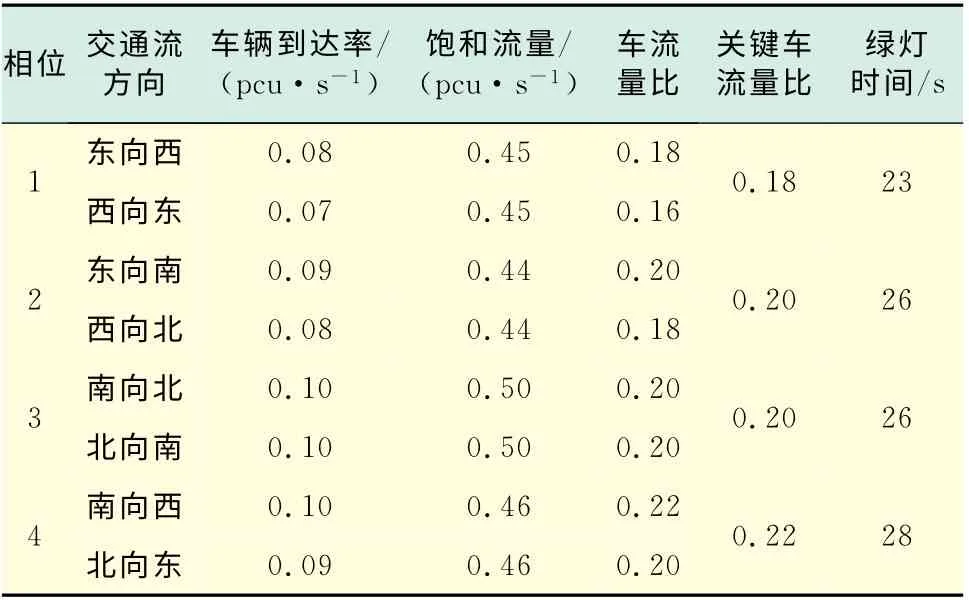
表1 交叉口流量Tab.1 Intersection traffic volume
式中,Y 为车流量比;yi为第i个相位对应的车流量比;L 为总损失时间;Si为第i个相位对应的饱和流量.各相位绿灯时间根据计算,在本例中,取gmin=15s,故直行相位绿灯减少时间t3=0,1,…,11s;取dmax==18m.
为验证本文提出的直行待行区时空资源集成优化模型的有效性,对不同直行待行区长度、直行待行区指示屏控制参数及直行相位绿灯减少时间组合下的直行车辆交通运行效益与环境效益进行VISSIM仿真分析.
3.2 仿真结果分析
在不同直行车辆到达率下,且直行相位绿灯减少时间t3=0时,对不同直行待行区长度下的直行车辆综合性能指标进行仿真分析,结果如图4所示.为直

图4 不同车辆到达率下的直行车辆综合性能指标Fig.4 Performance index of through vehicles under different arrival rate
由图4可知:
a.直行车辆综合性能指标PI随着直行车辆到达率的增加而增加,即直行车辆到达率越高直行车辆的交通运行与环境综合效益越差;
b.直行车辆到达率大于0.09pcu/s(324pcu/h)时,设置直行待行区后综合性能指标PI优于未设置直行待行区时的综合性能指标,尤其当直行待行区长度为18m(即直行待行区容量为3辆标准小汽车)时,在车辆达到率为0.14pcu/s(504pcu/h)时,其PI 值比未设置直行待行区时的PI值低27.9%,交通运行与环境综合效益大幅提升;
c.直行车辆到达率小于0.09pcu/s时,设置直行待行区后的综合性能指标PI劣于未设置直行待行区时的综合性能指标,尤其当直行待行区的长度为18m 时,在车辆达到率为0.04pcu/s(144pcu/h)时,其PI值比未设置直行待行区时的PI 值高71.3%,交通运行效益与环境效益大幅降低;
d.直行车辆到达率0.09pcu/s可作为直行待行区设置与否的流量临界条件;此外,如若设置直行待行区,可根据交通流检测器判断是否开启直行待行区指示屏允许直行车辆驶入待行区,当交通流检测器检测到直行车辆到达率大于0.09pcu/s时,指示屏显示“直行车辆允许驶入待行区”,当直行车辆到达率小于0.09pcu/s时,指示屏显示“直行车辆禁止驶入待行区”,以充分协调直行车辆的交通运行与环境综合效益.
对不同直行待行区长度、不同直行相位绿灯减少时间下的直行车辆综合性能指标进行仿真分析,结果如图5所示,由图可知:
a.当设置直行待行区后,且直行车辆到达率小于0.09pcu/s时,PI值不随直行相位绿灯减少时间变化而发生显著变化,此时可适当缩短直行相位绿灯时间;
b.当直行车辆到达率大于0.09pcu/s时,特别是针对直行待行区长度较短、直行车辆到达率较大的情况,应保持绿灯时间不变,或可适当延长直行相位绿灯时间.
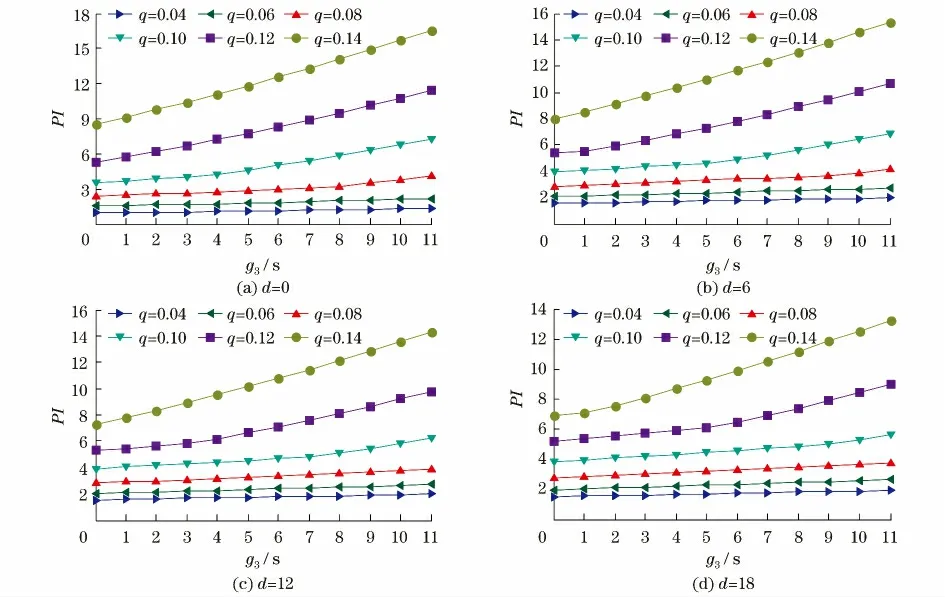
图5 不同直行待行区长度下的直行车辆综合性能指标Fig.5 Performance index under different length of waiting-area for through vehicles
4 结束语
设置直行待行区,并配以合适的信号控制策略,能够提高信号控制交叉口空间资源利用率,降低直行车道车辆排队长度.但直行待行区设置后会导致车辆二次起动-停车,从而造成车辆油耗及尾气排放增加等问题,故本文提出了一种交叉口直行待行区时空资源集成多目标优化模型.仿真结果表明,该模型能较好地协调交叉口直行待行区交通运行效益及环境效益.
本文的研究对象为单直行车道及其所属直行待行区,一般情况下,直行待行区与左转待行区会共同设置,且本文未将整个交叉口考虑在内,上述问题是未来重点研究工作.
[1]王秋平,谭学龙,张生瑞.城市单点交叉口信号配时优化[J].交通运输工程学报,2006,6(2):60-64.
[2]杨晓芳,张盛,付强.基于博弈论的信号配时方法研究[J].上海理工大学学报,2013,35(6):567-571.
[3]杜春燕,周溪召,智路平.基于系统动力学的交叉口通行能力测算模型的仿真与分析[J].上海理工大学学报,2014,36(5):449-455.
[4]倪颖,李克平,徐洪峰,等.信号交叉口机动车左转待行区的设置研究[J].交通与运输,2006(2):32-36.
[5]季彦婕,邓卫,王炜,等.信号交叉口左转机动车等待区设置方法研究[J].公路交通科技,2006,23(3):135-138.
[6]尚德申,王山川,王文红,等.信号交叉口直行待行区的设置研究[J].中外公路,2010,30(1):29-31.
[7]李小帅,贾顺平,孙海瑞,等.机动车待行区设置方法的实证研究[J].交通运输系统工程与信息,2011,11(S1):194-200.
[8]江颖.左转待行区对信号交叉口通行能力的影响研究[D].成都:西南交通大学,2013:36-49.
[9]Yang Z,Liu P,Chen Y G,et al.Can left-turn waiting areas improve the capacity of left-turn lanes at signalized intersections [C]∥8th Intersection Conference on Traffic and Transportation Studies.Changsha,2012:192-200.
[10]Yang Z,Liu P,Tian Z Z,et al.Effects of left-turn waiting areas on capacity and level of service of signalized intersections[J].Journal of Transportation Engineering,2013,139(11):1076-1085.
[11]王殿海,李丽丽,陈永恒,等.机动车左弯待转区设置的临 界 条 件[J].公 路 交 通 科 技,2009,26(11):132-135.
[12]李丽丽.信号交叉口左转交通流组织中的临界问题研究[D].长春:吉林大学,2009:53-69.
[13]荣建,何民,陈春妹.信号交叉口排队长度动态计算方法研究[J].中国公路学报,2002,15(3):101-103.
[14]王殿海,祁宏生,徐程,等.信号交叉口停车次数[J].吉林大学学报(工学版),2009,39(S2):140-145.
[15]Webster F V.Traffic signal setting[R].London:Rood Research Laboratory Technical Paper No.39,1958.
猜你喜欢
太原科技大学学报(2022年6期)2022-12-26 12:53:08
警察技术(2022年3期)2022-06-22 06:06:24
小天使·四年级语数英综合(2021年3期)2021-05-10 02:46:28
作文周刊·小学一年级版(2020年40期)2020-10-19 04:42:20
中国人民公安大学学报(自然科学版)(2019年3期)2019-10-23 04:00:40
重庆交通大学学报(自然科学版)(2017年3期)2017-05-17 03:37:32
娃娃乐园·3-7岁综合智能(2016年4期)2016-10-24 02:47:36
中国房地产业(2016年2期)2016-03-01 01:25:37
系统工程学报(2015年3期)2015-02-28 19:54:01
河南科技(2014年14期)2014-02-27 14:12:02
