
基于肌电触发的上肢康复训练机器人的实现
2015-11-22 11:45方又方喻洪流易金花
上海理工大学学报 2015年4期
方又方, 喻洪流, 官 龙, 易金花, 张 颖, 石 萍
(上海理工大学 医疗器械与食品学院,上海 200093)
现代康复理论与实践证明,由各种疾病引起的肢体功能障碍,除了手术治疗和药物治疗之外,科学的康复训练起着重要的作用[1-3].运动疗法是肢体功能障碍有效的康复方法之一.运动疗法的实现方式多种多样,其共同点是通过身体相关部位的肌肉产生收缩,引起关节的运动.传统的康复训练是由康复医师根据自身的治疗经验辅助患者完成各种动作,但这种训练方式存在许多不足之处[4],如训练效率低下,训练强度得不到保证,缺乏客观评价康复训练效果的数据,患者参与治疗的主动性和积极性不强等.近年来,康复机器人作为一种新的运动神经康复治疗技术,发展十分迅速,利用机器人技术对肢体功能障碍患者进行康复训练具有重要的意义[5-6].康复训练机器人的主要功能是帮助有肢体功能障碍的患者完成运动动作,从而使患者的部分运动机能得到恢复.
国内外对康复训练机器人已经展开了广泛的研究.国外代表性的高校有加利福尼亚大学、斯坦福大学、芝加哥大学、麻省理工学院、日本Akita Prefectural大学、华盛顿大学和瑞士苏黎世大学,另外,美国Motorika 公司、瑞士Hocoma 公司、美国Myomo公司、意大利BioRobotics研究所、意大利TecnoBody公司等企业也相继研发了一些代表性产品,功能都比较强大,并具有主动运动、被动运动等多种训练方式.2004年清华大学研制了二连杆机构的康复装置,具有主动、被动、助力及抗阻等训练模式,其助力训练模式是按照指定运动轨迹通过力矩反馈实现[7].2008年哈尔滨工业大学研制的穿戴式偏瘫上肢康复机械臂系统[8],具有5个自由度,能够进行主动、被动训练,同时具备力矩反馈功能,能够提取并识别四通道的表面肌电信号(surface electromyography signal,简称sEMG)作为控制源,驱动机械臂按照一定的运动轨迹进行康复训练.2012年华中科技大学研发的上肢康复装置采用气动肌肉的驱动方式[9],具有3个自由度,实现了主动辅助训练、被动训练和阻抗训练模式,也可以使用四通道的sEMG控制该机械装置.虽然国内多家科研机构也进行了康复机器人的相关研究,但使用表面肌电信号作为控制信号源实现助力运动的目前只有上述提到的华中科技大学和哈尔滨工业大学两例.在助力运动训练中,患者利用残存的肌肉力量的同时,借助康复训练机器人的带动实现功能障碍肢体的康复训练.助力运动模式能够最大程度上发挥患者的主观能动性,达到更加有效的训练效果,这在临床康复中越来越受到重视.华中科技大学和哈尔滨工业大学两例的共同特征是具备多通道sEMG识别功能,虽然在算法的选用和具体的控制系统实现方面又具备各自的特征,但sEMG 都需要读入到与康复训练机器人分离的计算机系统中进行运算与处理,这不仅增加了整个系统的体积,也消耗了大量的控制系统资源.
本文基于32位单片机设计了一套肌电采集装置,能够提取出一级肌力以上的患者的表面肌电信号,结合嵌入式动力控制系统驱动上肢康复训练机器人进行助力训练.
1 基本机械结构
传统的具有三维空间运动功能的电动上肢康复训练机器人多数将关节驱动电机及附属的减速箱安装在对应的上肢关节处.这类设计显然增大了患者视野范围内的设备体积,往往会增加患者训练时的心理压力,同时由于电机这类大功率设备距离患者较近,使得其噪音与电磁辐射[10-13]对患者的不良影响增大.为了克服这些影响,研制了一种三自由度中央驱动式上肢康复训练机器人.该机器人的特点是使用集中安装在设备底座的驱动电机作为动力输出装置,经过减速箱减速,并利用磁粉离合器作为动力级别调控装置,最后通过套筒及齿轮将动力传递输出到上肢的肘关节与肩关节处,完成肩关节屈伸、肩关节收展及肘关节屈伸这3个自由度的运动.通过采用套筒形式及锥齿轮传动,将动力从3个独立的动力源互不干扰地传到肩关节和肘关节,如图1所示.
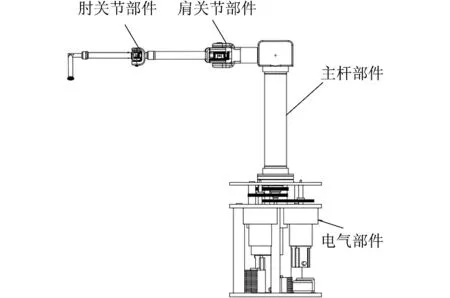
图1 三自由度中央驱动式上肢康复训练机器人总体结构Fig.1 Overall structure of central driven upper limb rehabilitation training robot with three degress of freedom
三自由度中央驱动式上肢康复训练机器人的以上结构还可以方便地转换左/右手臂进行康复训练,满足设计要求.3个自由度的关节活动范围如表1所示.

表1 关节活动范围Tab.1 Rangeofmotion
本文的上肢康复训练机器人机械系统的运动具有关联性,其运动会相互影响,肩关节的屈曲/伸展运动会影响肩关节的内收/外展和肘关节的屈曲/伸展的运动,肩关节的内收/外展运动会影响肘关节的屈曲/伸展的运动.所以,要准确控制各关节运动就要考虑相互之间的影响.通过理论计算以及实验验证得到3个自由度相互影响的公式为
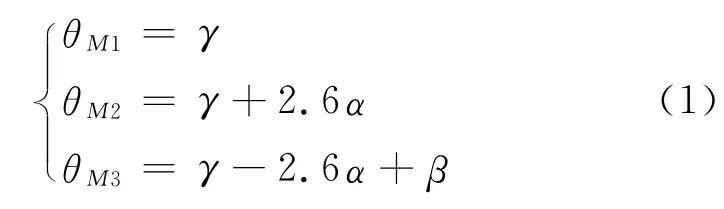
式中,γ 为肩关节屈伸角度;α 为肩关节收展角度;β为肘关节屈伸角度;θM1为驱动肩关节屈伸自由度的电机输出角度;θM2为驱动肩关节收展自由度的电机输出角度;θM3为驱动肘关节屈伸自由度的电机输出角度.
2个关节3个自由度的示意图如图2所示.
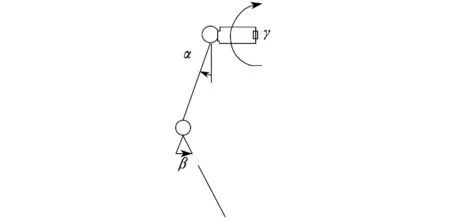
图2 3个自由度对应角度示意图Fig.2 Diagrammatic sketch of angles corresponding to the three degrees of fredom
在单片机程序中实际使用该算法时,需要各自乘以3个自由度对应的减速比才是电机输出对应的实际运动关系.
2 系统设计方案
2.1 整体设计
整体方案示意图如图3所示.在整个上肢康复机器人训练系统中,整体电气控制系统主要由底层动力控制系统与顶层嵌入式用户控制系统组成,本文的主要任务是设计并运用动力控制系统,通过检测患者的肌电信号,判断其运动意图,继而实现基于肌电信号触发的助力训练.对于底层动力控制系统,其结构主要由供电系统、运算控制单元、动力输出单元和执行机构组成.需要注意的是肌电触发的助力训练是建立在单关节和多关节的被动训练实现的基础之上的.

图3 系统总体结构框图Fig.3 Block diagram of overall structure of the system
2.2 底层动力系统设计
动力系统的结构框图如图4所示(见下页).底层动力系统是整个上肢康复机器人的动力来源,它将由供电系统分配给电机驱动器和磁粉驱动器[14]的电能,在控制系统的配合下分配输出给整个机械结构,最终转化为机械能和热能.底层动力系统的主要功能是接收由用户控制系统发出的控制命令,控制3台步进电机运动,调整3台磁粉离合器输出力矩,采集6个光电编码器的数据.本文中的三自由度中央驱动式上肢康复机器人通过用户控制系统设置训练计划来完成被动训练,通过检测患者肌电信号来触发助力训练.
三自由度中央驱动式上肢康复训练机器人的动力由步进电机提供,磁粉离合器具备力矩调节功能,它配合减速箱完成动力的传动与调节.该康复训练机器人的设计目标是完成3个自由度的训练,设计中需要有3台步进电机,它们分别用于驱动肩关节的屈曲/伸展运动、肩关节的内收/外展运动和肘关节屈曲/伸展运动;3台步进电机输出经过减速箱减速后传递到3台独立的磁粉离合器,再连接齿轮传动到关节活动处.磁粉离合器型号在图4中已标出.
2.3 动力控制系统设计
动力控制系统的结构框图如图5 所示(见下页).运算控制单元是动力控制系统的核心部分,不仅要接收用户控制系统的控制指令,还要将控制指令解析,并发送指令使动力输出单元执行.本文的设计采用4块控制板进行控制,包括1块主控制板和3 块子控制板.主控制板负责接收用户控制系统的控制指令,并将其解析后分别传输给3块子控制板,同时接收并采集关节侧的运动速度和角度等反馈信息,肌电信号的采集和处理也是由主控制板完成.3块子控制板分别控制肩关节屈曲/伸展运动的电机、肩关节内收/外展运动的电机、肘关节屈曲/伸展运动的电机,根据上层控制板发送的指令驱动对应的电机运转,既采集电机的角度和转速等反馈信号,同时又动态调节电机转速和磁粉离合器的传动力矩.
图4 动力输出单元结构框图Fig.4 Structural diagram of power supply unit

图5 运算控制单元结构框图Fig.5 Structural diagram of arithmetic control unit
3 表面肌电信号处理及助力训练模式实现
3.1 表面肌电信号处理
表面肌电信号是一种非常微弱的生物电信号,肢体运动相关联的很多信息可以通过表面肌电信号提取出来.人体的各种形式的运动,都是由大脑中枢神经及其支配的骨骼肌协调配合来完成的.不同患者的表面肌电信号存在差异,相同的患者在不同肌肉的位置上也存在差异,但是,仍然具有一些共同的特点.
a.表面肌电信号属于一种微弱的生物电信号,正常的肌肉运动所产生的电位最大幅度不超过5mV,一般为100μV到2 mV之间,对于脑卒中患者来说,肌电信号的强度大概为20μV,甚至比这个值更低.
b.表面肌电信号属于交流电压信号,人的肌力越大,其幅值就越大,大致呈正比关系.表面肌电信号的电压幅值与其肌肉的松弛、握紧度存在着近似线性比例的关系.
c.表面肌电信号其频率较低,范围主要集中在10~500Hz之间,在300Hz以上,频率就显著衰减.绝大部分的能量主要集中在20~150Hz之间.
d.表面肌电信号是一种随机信号,并且为非平稳信号,其统计学特性随着时间的变化而发生变化.由于肌电信号是在不同的运动单元的肌纤维上的多个动作电位在采集的信号区域叠加而成,所以,对于每次的测量都有一定的随机性.
健康人肌电强度的峰峰值可以达到1~3mV,脑卒中患者肌电信号幅度一般在100μV 以下,大约比正常人减少数倍甚至数百倍之多.由于诸多原因,表面肌电信号的幅度小、信噪比较低,易受到周围环境中的电磁场辐射干扰和检测仪器内部电子噪声的干扰,所以,对表面肌电信号的采集、分析和处理还存在很多的难点.鉴于肌电信号的上述特点,结合信号放大的基本常识,所以,对肌电采集电路设计提出如下要求:a.高增益性;b.高输入阻抗性;c.优越的频率响应;d.高共模抑制比;e.低噪声、低漂移.
运用表面电极对肌电信号进行采集时,其能量主要集中在500 Hz以下,对于表面肌电放大器的频带一般设置为20~500 Hz之间,且频带外的衰减速率一般不低于40 dB/十倍频程.此外.合理的设计电路的接地方式、采用50 Hz陷波器克服工频干扰等措施也是有效且必须的抗干扰手段.本文的肌电采集电路主要分为采集电极、前置放大电路、双T滤波电路、选频电路、增益可调电路几个部分组成,其框图如图6所示.

图6 表面肌电信号提取电路Fig.6 sEMG extraction circuit
需要注意的是,经过以上步骤提取出的肌电信号是正负交变的交流信号,为了便于使用单片机采集该肌电信号,故要对上述信号进行绝对值处理以及限制信号幅度,同时为了提高识别准确度,使用运放进行处理得到包络线,双侧肌电信号的采集波形图的最终结果如图7所示.

图7 手臂上下用力时信号波形图Fig.7 Graph of signal waveform during the swinging of arm
3.2 助力训练模式的实现
本文设计的基于肌电信号的助力训练是检测患者的肌电信号来判断运动意图,所以,需要检测患者的两路肌电信号的强弱来对比,从而判断其想要运动的方向.设计中首先分别检测两路肌电信号的强度是否达到启动值,若其中的任何一路达到了启动值的大小,则进入下个判断条件.将两路肌电信号取差值,判断差值是否大于设定阈值,若大于,才能驱动电机运转,程序流程图如图8所示.

图8 肌电助力训练程序流程图Fig.8 Flow chart of sEMG force-assist training program
本文设计中有肌电信号的调速功能,患者不同的肌电强度对应着不同的电机转速.主要思路为,当肌电信号增大时,电机的速度增大,并且是增加速运动,即肌电强度越大,其速度的变化越大.
4 肌电信号采集及速度调节实验
4.1 肌电信号训练动作识别实验
本文实验选用肩关节的屈曲和伸展这一自由度作为肌电助力训练的实验对象.实验提取的是正常人手臂的肌电信号,所以,采集到的信号幅度较大,设置的阈值也相对较大.针对不同的患者其最佳的阈值不同,阈值选取的好坏直接影响其训练动作的完成程度.为了找出较好的阈值范围,通过粗略观测前期肌电信号波形图,实验分别设定阈值为600,1 000,1 400mV,做3组对照实验.要求实验者手臂分别向上、向下用力20次,并规定向上为步进电机正转、向下为步进电机反转.分别记录识别次数、误识别次数和不识别次数,得到数据如表2—4所示.

表2 阈值为600mV 时训练动作识别情况Tab.2 Recognition result of training when the thresholdvalueis600mV

表3 阈值为1 000mV 时训练动作识别情况Tab.3 Recognition result of training when the thresholdvalueis1000mV

表4 阈值为1 400mV 时训练动作识别情况Tab.4 Recognition result of training when the thresholdvalueis1400mV
从表2—4中可以看出,当阈值设置过低时,容易造成识别率降低,并且是由误识别所造成.因为,在采集信号的过程中,若使用者在没有训练意图的情况下触发了肌肉产生信号,且信号值到达了所设定的阈值,也会产生相应的动作,所以,就造成了误识别.当阈值设置过高,使用者其产生的肌电信号强度达不到阈值的大小,也会造成识别率降低,甚至不识别.所以,综上,对于阈值的设定,要根据患者的采集的肌电信号的强弱来挑选一个合适的值,不同的使用者其设定的阈值不同.
4.2 基于肌电信号的速度调节实验
为了验证肌电强弱可以调节其训练速度的大小,在设定阈值为1 000mV 的时候,患者运用不同的肌肉强度运动,记录信号的强度大小和电机转速的大小,如表5所示.
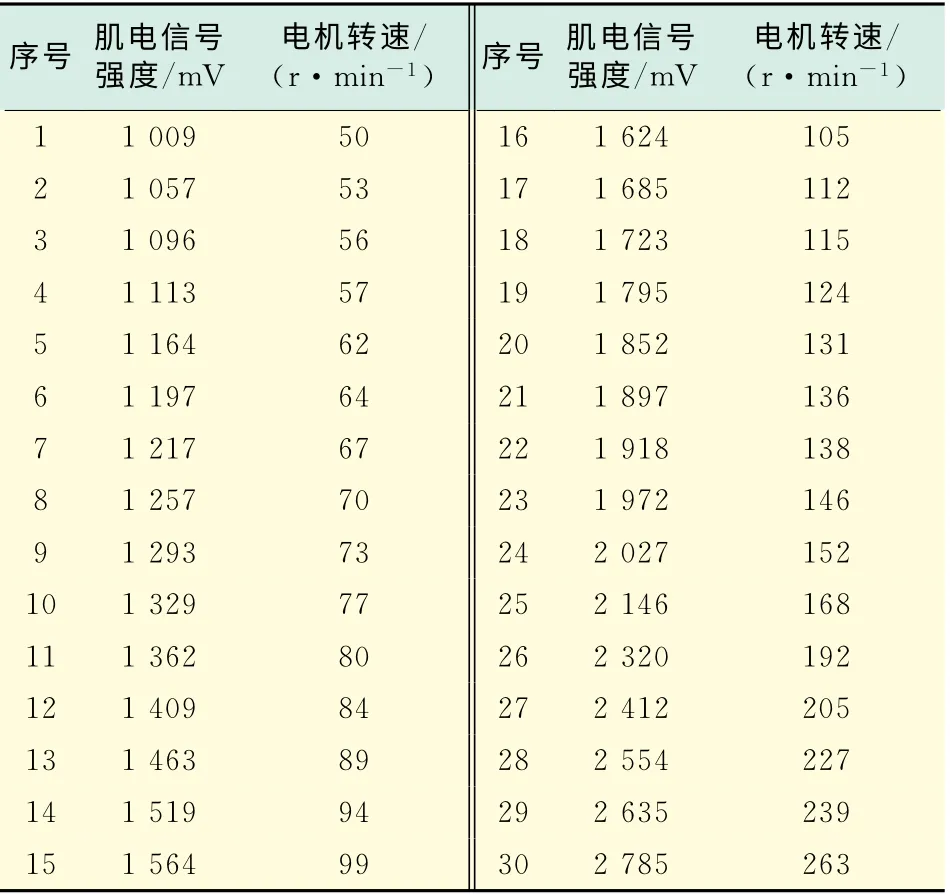
表5 不同肌电信号强度对应的电机转速Tab.5 Motor speed varying with the sEMG signal intensity
由表5得出电机转速随肌电信号强度变化图,如图9所示,从曲线可以看出,随着肌电信号的变强,其训练关节的电机转速逐渐变快,并且在加速上升过程中加速度是增大的,即肌电信号越强,其速度变化得越快.
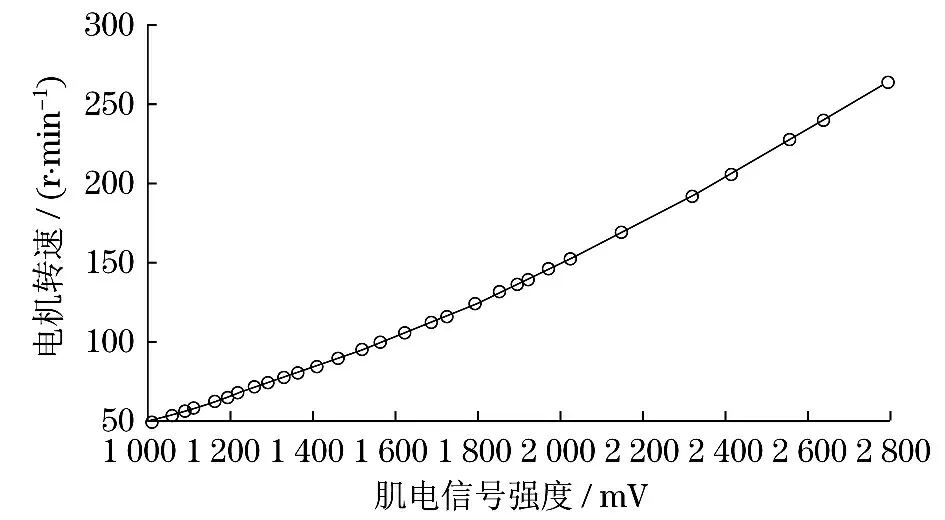
图9 电机转速随肌电信号强度变化曲线Fig.9 Curve of motor speed varying with the sEMG signal intensity
5 讨论与结论
本课题来源于上海市科技支撑项目“脑卒中患者用智能交互式上肢康复训练机器人关键技术研究”,并且是在实验室研制的三自由度中央驱动式上肢康复训练机器人机械样机的基础上进行控制系统研发.本文是基于第一套单芯片控制方案的改进方案,针对样机,利用LPC17XX 系列单片机,提出并实现了一种多芯片分布式控制方案.通过分析人体表面肌电信号的特性和肌电信号的处理方法,设计了具有高输入阻抗、低噪声的肌电信号采集电路,最终通过运算放大电路提取到可以用于单片机采集控制的有效肌电信号.利用采集到的肌电信号设计了一种基于肌电信号触发的助力训练控制模式,助力训练级别软件可调,机械臂能够实时响应肌电信号输入,通过实验验证可以看出,输出速度与两通道的肌电信号差值成二次函数关系,同时,设定不同的阈值对识别患者的运动意图有一定的影响,阈值设置过低,则难以区分是运动意图还是误动作干扰信号,但是,如果阈值设置过高,由于患者肌电信号达不到设定值,识别率也会降低.
目前上肢康复机器人的主要控制方式有力矩反馈控制、表面肌电信号控制及脑电信号控制等方式.其中,力矩反馈控制方式用得最多,该方式是通过检测电机运行时的输出力矩实现;脑电信号控制由于提取难度较大而用得较少;表面肌电信号能够在一定程度上反应神经肌肉的活动,具有无创性、实时性、操作简单、多靶点测量等优点[15].目前,国内外对于人体肌肉电信号的分析主要有频域分析法和时域分析法[16-19],表面肌电信号控制用于控制假肢的研究较为常见,用于上肢康复训练机器人进行康复训练则相对较少.
本文针对一对拮抗肌和肩关节的一个自由度进行助力训练,在接下来的研究中,将对肌电触发控制进一步改进,分别采集三对肌肉的信号,通过分析判断来综合控制机械臂实现更准确的运动.同时,对肌电信号的测试也需要进一步进行临床试验测试,从而不断提高该康复训练系统的可靠性和实用性.
[1]Ostwald S K,Davis S,Hersch G,et al.Evidence-based educational guidelines for stroke survivors after discharge home[J].Journal of Neuroscience Nursing,2008,40(3):173-179.
[2]夏军,周新萍,夏宏杰.早期康复训练对脑卒中患者偏瘫肢体功能恢复的影响[J].卒中与神经疾病,2007,14(6):372-373.
[3]戴玲,陈旗,王彤.神经肌肉促进技术在偏瘫上肢康复训练中的临床应用[J].中国康复医学杂志,2004,19(11):827-829.
[4]胡宇川,季林红.从医学角度探讨偏瘫上肢康复训练机器 人 的 设 计[J].中 国 临 床 康 复,2004,8(34):7754-7756.
[5]Riener R,Nef T,Colombo G.Robot-aided neurorehabilitation of the upper extremities[J].Medical and Biological Engineering &Computing,2005,43(1):2-10.
[6]Mehrholz J,Platz T,Kugler J,et al.Electromechanical and robot—assisted arm training for improving arm function and activities of daily living after stroke[J].Stroke,2009,40(5):392-393.
[7]胡宇川,季林红.一种偏瘫上肢复合运动的康复训练机器人[J].机械设计与制造,2004,(6):47-49.
[8]李庆玲,孔民秀,杜志江,等.5-DOF 上肢康复机械臂交互式康复训练控制策略[J].机械工程学报,2008,44(9):169-176.
[9]吴军.上肢康复机器人及相关控制问题研究[D].武汉:华中科技大学,2012.
[10]陈永校.电机噪声的分析和控制[M].杭州:浙江大学出版社,1987:67.
[11]王建民,让余奇.电机噪声分析及抑制措施[J].船电技术,2010,30(8):8-11.
[12]诸自强,陈永校.电机电磁噪声的辐射声功率[J].大电机技术,1987(1):23-27.
[13]刘鸣,景建方.降低电机噪声的方法研究[J].船电技术,2011,31(12):21-24.
[14]郝润科,杨一波.绝缘栅双极型晶体管(IGBT)驱动及保护电路的研究[J].上海理工大学学报,2004,26(3):283-285.
[15]王健.sEMG信号分析及其应用研究进展[J].体育科学,2000,20(4):56-60.
[16]Sbriccoli P,Bazzucchi I,Rosponi A,et al.Amplitude and spectral characteristics of biceps Brachii sEMG depend upon speed of isometric force generation[J].Journal of Electromyography and Kinesiology,2003,13(2):139-147.
[17]Reddy N P,Gupta V.Toward direct bio-control using surface EMG signals:Control of finger and wrist joint models[J].Medical Engineering &Physics,2007.29(3).398-403.
[18]Disselhorst-Klug C,Schmitz-Rode T,Rau G.Surface electromyography and muscle force:Limits in sEMGforce relationship and new approaches for applications[J].Clinical Biomechanics,2009,24(3).225-235.
[19]罗志增,严庭芳.基于HMM 的表面肌电信号模式分类[J].华中科技大学学报:自然科学版,2008,36(4):72-75.
猜你喜欢
成都信息工程大学学报(2021年4期)2021-11-22
中华肩肘外科电子杂志(2019年4期)2019-08-24
科技传播(2019年24期)2019-06-15
测控技术(2018年6期)2018-11-25
北京航空航天大学学报(2017年9期)2017-12-18
制造业自动化(2017年2期)2017-03-20
中国民族医药杂志(2016年7期)2016-05-09
中华肩肘外科电子杂志(2016年2期)2016-01-23
中华肩肘外科电子杂志(2015年2期)2015-01-22
中国中医药现代远程教育(2014年14期)2014-03-01
