面向WSN的自适应模糊功率控制算法研究*
2015-11-18 04:54邵奇可冯淑娜毛科技
传感技术学报 2015年4期
邵奇可,冯淑娜,毛科技
(浙江工业大学计算机科学与技术学院,杭州 310023)
面向WSN的自适应模糊功率控制算法研究*
邵奇可*,冯淑娜,毛科技
(浙江工业大学计算机科学与技术学院,杭州 310023)
在无线传感器网络环境中存在干扰以及网络的动态变化等原因,传输可靠性问题成为保障网络服务性能的重要挑战之一。现有的研究方法基本没有考虑网络的动态性,节点能耗较高。为此,我们提出了一种面向WSN的自适应模糊功率控制算法DAFPC。该算法采用自适应模糊理论,并基于“输入-输出-反馈”机制,根据接收到的链路质量参数信息自适应地调整控制器,快速地调节发射功率。研究仿真结果表明,DAFPC算法能很好地适应网络的动态变化,有效地提高WSN的抗干扰性和传输可靠性,延长了网络的生存时间。
无线传感器网络;自适应模糊理论;功率控制;传输可靠性;抗干扰;网络生存时间
无线传感器网络 WSN(Wireless Sensor Networks)由部署在监测区域内的大量传感器以自组织和多跳的方式构成,以协作方式感知、采集、传输和处理网络覆盖区域内的监测对象信息,在军事领域和民用领域都有非常广阔的应用[1]。在保障WSN中的传感器节点可以大量部署并且正常运行的过程中会遇到许多实际的困难,比如保证网络的传输可靠性以及降低节点的传输能耗来延长网络的生存时间。同时,在WSN中障碍物干扰以及节点的移动等都会对传输的可靠性造成影响,甚至导致整个网络链路质量的不稳定。例如水下传感器以及测量水温、水流速的传感器极易产生位置变化而引起网络链路质量的不稳定性[2-3]。现有研究表明网络链路质量的不稳定性会导致通信质量下降[4]。通过不断地重传等方式能够保证一定的传输可靠性,但是这样会消耗大量的能量,而普通传感器节点是由电池供电的,能量供应是有限的,因此WSN需要一种高效的传输可靠机制。针对WSN的传输可靠性问题,近年来国内外研究者们做了许多研究,主要包括:重传、路径冗余、网络编码以及调节功率等方法。WSN传输可靠性的研究现状如图1所示。

图1 WSN传输可靠性的研究现状
重传机制可分为端到端重传和逐跳重传[5]。文献[6]采用基于NACK(Negative Acknowledgements)的端到端重传来解决可靠性问题。然而这种机制依赖于每条链路的质量,当信道的错误率达到10%以上时,可靠性将急剧恶化。文献[7]采用基于NACK的逐跳重传,然而由于WSN能量有限、链路可靠性不够、带宽低等特点,逐跳重传并不是一种最优方法。因为它要求接收节点对收到的每一个包做出应答,当链路错误率较高时,将导致频繁地重传。
路径冗余主要包括两种方法:一种是提前选好路径并设置一条默认路径,当出现错误时,改选路径;另一种方法是发送数据包给多条路径来提高数据传输的可靠性。文献[8]采用路径冗余的第一种方法,提出一种睡眠多路径机制,节点通过选择不相交路径来获得可靠性和能量高效性的平衡。文献[9]采用路径冗余的第二种方法,将多份相同的数据包发送给多条被选中的路径。路径冗余方法有效地提高了WSN的传输可靠性,然而,路径冗余方法需要大量节点参与数据传输,消耗大量的能量。
网络编码方法关键的策略是加入冗余信息并减小编码的复杂度,比如前向纠错FEC(Forward Error Correction)编码[10]将要发送的数据包进行编码,然后有控制地加入一些冗余的信息,这样使得接收的节点可以根据冗余信息检错及纠错。该方法适用于链路错误率较低的网络,然而当链路错误率较高时,需要发送大量的冗余包,造成能量的快速消耗。
调节功率算法可以在确保可靠性的前提下节省节点能量。如果以最大功率发送数据包,可靠性较高,但是容易导致节点快速消耗能量,造成不必要的能量浪费,从而使得网络的生存时间缩短。比如Narayanaswamy等人提出的通用功率 COMPOW (Common Power)算法[11],全网采用统一发射功率,当网络节点的撒布不均匀时,全网的统一发射功率可能会很大,造成每个节点能量浪费,降低全网的生存时间。因此,可在保证可靠性前提下最小化发射功率,节点通过信道反馈信息减小发射功率。但是,发射功率减小后,当链路动态变化时,链路可靠性必然受到影响,此时可以通过适当增加发射功率来提高链路可靠性。模糊控制器适用于难以用数学模型来描述或者传统模型会引入复杂的计算场景[12]。随着模糊理论的发展,模糊理论不断被应用到WSN中[13-16]。文献[13]提出了一种功率控制算法,将模糊逻辑应用于点对点通信的功率控制。该算法基于链路质量指示 LQI(Link Quality Indicator)调节功率,当接收节点接收到的LQI值较低时,增大功率,反之则降低功率,节省能量的同时保证了链路质量。该方法实现了低功耗可靠数据传输,且延长了网络的生存时间。然而该方法调节功率不够稳定,导致整个系统的鲁棒稳定性不高,并且控制器本身不能根据链路质量的变化来动态调节其参数,无法适应网络的动态变化。文献[14]设计了一种基于媒体访问控制MAC(Medium Access Control)协议参数的模糊控制器。仿真结果表明对于高负荷和低能量的节点,能量消耗可以减少50%。该模糊控制器使用Mamdani方法[17]作为模糊推理技术,因为这种方法比较简便并且易于在传感器节点上实现。模糊过程可以分为以下3个步骤:①模糊化输入变量电池能量以及平均数据包能量;②规则求值程序取模糊化后的电池能量和数据包流量作为输入,模糊规则的输出是MAC协议中传感器节点的睡眠时间;③最后通过解模糊得到睡眠时间的精确值。与使用常量值的睡眠时间方法相比,文献[14]中的方法减少了节点的能量消耗,延长了网络的生存时间。然而该方法仅仅通过调节睡眠时间来延长网络生存时间,并没有对功率进行自适应地调节。
综合上述文献,现有的WSN传输可靠性方法主要存在以下问题:①链路错误率较高的情况下,重传机制、路径冗余以及网络编码容易消耗大量的能量,这对能量受限的WSN而言代价太大。②针对调节功率的方法,方法目前没有根据通信的网络链路质量情况来动态地调节功率。③由于无线传感器网络存在动态性,比如节点移动或受到障碍物干扰,而现有的方法基本都没有根据网络的动态变化来自适应地调节功率。
因此,本文提出了一种面向WSN的自适应模糊功率控制算法DAFPC。DAFPC可以随节点的移动自行调节发射功率,因此具有较好的控制性能,并且自适应模糊控制对建立被控对象数学模型的信息要求不高[18]。当有障碍物干扰或者节点移动的情况下,它能适应网络的动态变化,根据链路质量参数的反馈信息,及时并快递地调节传感器节点的发射功率,保证链路的质量并提高抗干扰性和传输可靠性。同时,此算法能节省传感器节点的能量消耗,延长网络的生存时间。
本文的组织结构如下:第1节给出自适应模糊功率控制系统结构和本文研究重点;第2节根据控制理论建立数学模型,设计DAFPC算法;第3节分析并证明了DAFPC中闭环系统的渐近稳定性;第4节介绍控制器参数化求解的过程;第5节进行算法可行性分析;第6节进行仿真实验并分析仿真结果;最后,第7节是研究内容的总结。
1 问题描述
本文研究分析的自适应模糊功率控制系统结构如图2所示,系统主要包括:发射节点,接收节点,发射节点与接收节点间的网络。该系统构造了一个点对点模型。其中,发射节点发送数据包给接收节点,接收节点根据接收到的数据包得到LQI值。自适应模糊控制器,即图中带可调参数的模糊控制器,根据接收到的LQI值动态调整自适应参数,并输出功率的调整值。本文研究过程中假定发射功率连续可调,并且发射节点根据功率调整值调整发射功率。

图2 自适应模糊功率控制系统的框图
图2中Δp表示发射功率的调整值,LQI*表示被控对象(网络)状态量的期望值,即链路质量指示的期望参考值,LQI表示实际得到的链路质量指示的值,d表示非持续性外部扰动,e表示偏差加上扰动的值,即e=LQI*-LQI+d。执行器表示发射节点,被控对象表示发射节点和接收节点之间的网络。
本文研究中的重点是基于自适应模糊理论,为WSN功率控制设计一个自适应控制器u=u(x|θ)和一个可调节参数向量θ的自适应律,以达到以下目的:①闭环系统能够达到全局稳定,e收敛至零的一个邻域;②系统能够适应网络的动态变化,具有良好的动态重构能力和抗扰动性能。
2 系统模型
本节首先介绍链路质量关键参数的选取,然后将选取的链路质量关键参数作为被控对象模型中的状态量,并给出被控对象的模型,最后根据被控对象模型以及设计的模糊控制器建立了闭环系统的模型。
2.1 链路质量关键参数
DAFPC算法通过链路质量关键参数LQI来调节节点的发射功率,达到在保证链路质量的前提下尽可能地减小节点发射功率的目的。目前,传统评估链路质量的方法是将接收节点的包接收率作为底层链路质量的评估参数。虽然评估结果较为准确,但各节点需要周期地发送探测数据包,以评估其与邻居节点的通信质量,当节点密度很高时,会造成较大的网络开销。IEEE 802.15.4标准[19]中定义了链路质量指示LQI值,每个数据包中都有一个字段用来描述LQI值的大小,表示接收数据帧的质量。研究表明,LQI的值与包接收率具有强相关性[4,20-21],该参数能很好地反映链路质量,且相比于将包接收率作为链路质量的评估参数,能节省通信开销。因此,本文在设计自适应模糊功率控制器时,采用评估链路质量的关键参数LQI作为输入参数。
2.2 被控对象模型
考虑以下形式的n阶非线性系统:

2.3 闭环系统模型
假设模糊控制器为

式中:uD是一个模糊控制器,θ是可调参数的集合,即自适应参数的集合。
进一步,将模糊控制器表示为:
式中:ξ(x)是关于x的函数。需要为θ确定一个调理机制,即自适应律,使得e和参数误差θ-θ*达到最小,其中θ*表示最优参数。
令

选取自适应律:

则:

其中:γ是正常数。P是一个正定矩阵,pn为P的最后一列。
显然,由式(3)和(5),可以将控制器表示为


式中:ym表示被控对象输出的参考值,即ym=LQI*。将式(8)代入n阶非线性系统表达式(1)中,则,系统的闭环控制系统方程如下:

根据k的选取,可得当t→∞时e(t)→0,即系统的跟踪误差收敛到零的一个邻域。然而函数f(x)是未知的,故控制律(8)不可实现,因此接下来利用方程式的转化消除函数f(x)。
式(8)可转化为如下式:

同时,将式(2)代入式(1)中,整理可得:

由式(4),可得

将式(10)与式(11)相减,代入式(12),整理可得

令

由式(4)、式(15)和式(16),可以将动态方程(13)改写为如下形式:

定义最优参数为

定义最小逼近误差为

式(17)可进一步改写为如下形式:

由式(3)、式(19)和式(20)可得闭环系统模型:

3 系统稳定性分析
定理1 对于系统(21)和给定的控制器(7),如果存在正定矩阵P和正定矩阵Q满足Lyapunov方程ΛTP+PΛ=-Q,pn为P的最后一列,且存在最小逼近误差w,使得以下矩阵不等式成立:

则相应的闭环系统(21)渐近稳定。
证明 针对式(21),选取Lyapunov函数

则式(21)可改写为

先对V1进行求导,利用式(25)可得
将式(24)代入上式,整理可得

然后对V2进行求导,可得
将式(29)和式(30)结合,可得V关于时间的导数为

根据式(31)~式(33),可得


d是非持续性外部扰动,具有随机不确定性并且能量有限,即满足当t→∞时d(n)→0,因此,上式可进一步表示为如下:
将自适应律的导数式(6)代入式(34),可得

4 控制器参数化求解
本节通过求解控制器中的关键参数来构造模糊控制器。模糊控制器uD(x|θ)可由以下3步来构造。
步骤1 对变量x,定义n个模糊集合Al(l=1,2,…,n)。
步骤2 设计模糊规则来构造模糊控制器uD(x|θ)。
使用乘积推理机、单值模糊器和中心平均解模糊器[24],可得

控制器(7)中的ξ(x)为一个m维向量,其第l个元素为:

步骤3 控制器(7)的自适应律中的γ选为一个正常数,pn为正定矩阵P的最后一列。选取k,得到Λ。选定一个正定矩阵Q,根据式(14)和Lyapunov方程求解出P,选取P的最后一列即可求得pn。利用由此得到的自适应律在线调节控制器中的自适应参数。
5 算法可行性分析
无线传感器节点不仅能量有限,且运算能力和存储能力也十分有限。本文中的DAFPC算法能够在一定程度上节省节点的能量,延长网络生存时间。网络生存时间的比较将在仿真部分给出,本节重点分析对于运算能力和存储能力有限的传感器节点DAFPC算法的可行性。
①针对运算能力有限的问题,本文中的DAFPC算法在运行过程中根据设计好的自适应模糊控制器,即表达式(7)得到功率调整值Δp。式(7)中的e跟据接收节点接收到的LQI值与LQI期望值作差值并加入扰动即可计算得到,γ值和pn值在参数化求解过程中已经得到,代入即可。ξ(x)根据实现制定好的LQI隶属度函数得到。根据上述的自适应模糊控制器,每次控制过程中,计算一次e,一次ξ(x),再做简单的矩阵相乘运算即可得到Δp。这样的计算量对于无线传感器节点而言尚可接受。
②针对存储能力有限的问题,主要是接收节点需要存储LQI实际值和LQI期望值,γ值和pn值,以及LQI隶属度函数。LQI期望值,γ值和pn值,以及LQI隶属度函数在控制之前已经给定,每次控制时仅需更新LQI实际值即可。这样的存储量对于无线传感器节点也在承受范围之内。
6 仿真设计与分析
本文通过仿真工具MATLAB模拟网络环境并实现DAFPC算法。同时使用MATLAB实现了非自适应模糊功率控制和COMPOW算法作为参照。
6.1 仿真实验设计
在仿真过程中同时采用了点对点模型和多节点网络模型。其中,在点对点模型中,部署了2个传感器节点,对比非自适应模糊功率控制和DAFPC算法的收敛速度和抗干扰性。在多节点网络模型中部署了100个传感器节点和4个簇头节点,比较COMPOW、非自适应模糊功率控制和DAFPC算法的网络生存时间。
6.1.1 点对点模型
在点对点模型中,根据图2中的系统结构设计发射节点和接收节点。假设发射节点和接收节点间的距离为固定的40 m,每秒发送1个大小为45 byte的数据包。同时假设发射节点和接收节点间的距离是变化的,每隔20 s节点间的距离变化0~3 m之间的随机值。此外,根据文献[4]将LQI期望值设置为110。
6.1.2 多节点网络模型
在多节点网络模型中拓扑结构如图3所示,模拟在100 m×100 m的正方形环境区域里,包含一个Sink节点(汇聚节点或者基站)作为数据收集节点;并随机放置100个无线传感器节点,所有节点分成4个簇,每个簇包含1个簇头,一共4个簇头。Sink节点与簇头进行通信,簇头负责与簇内成员通信。
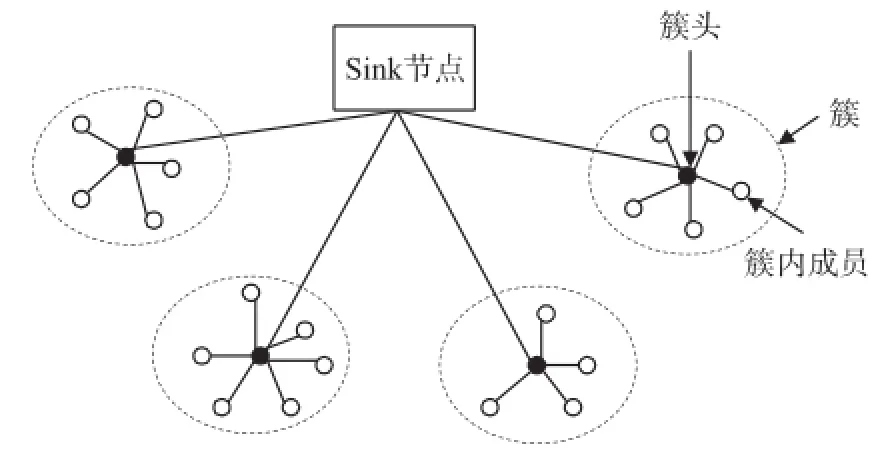
图3 网络拓扑结构示意图
本文提出的算法假设:①所有的传感器节点具有相同的初始化能量、能量消耗系数以及最大通信半径;②每个传感器节点的能量有限,Sink节点和簇头节点的能量不受限制;③所有的传感器节点采用统一的能量消耗模型;④节点之间通过簇头进行通信,因为本文的功率控制算法与分簇算法具有无关性,所以选取不同的分簇算法并不影响本文的研究结果。
根据WSN采用的IEEE 802.15.4协议,本文设定每次两个节点间通信时传输10个数据包,每个数据包长度为45 byte。每次通信时随机选取20个传感器节点进行通信。实验模拟水下传感器节点漂浮的场景,发射节点的位置每次移动0~3 m之间的随机值。节点初始发射功率根据COMPOW算法计算统一的固定功率。簇头节点与簇内成员同时运行功率控制算法。LQI期望值设置为110。多节点网络模型仿真的主要参数如表1所示。

表1 多节点网络模型下算法仿真的主要参数
6.1.3 模糊控制器仿真设计
本文设计的模糊控制器输入精确的LQI值,将LQI值模糊化得到相应的模糊语言变量,然后根据LQI的模糊语言变量和模糊规则得到Δp的模糊语言变量,最后解模糊得到精确的功率调整值Δp。
设计模糊控制器时LQI模糊化隶属度函数的模糊集分为VBAD、BAD、PERFECT、GOOD和VGOOD5个模糊集,分别表示接收到的LQI值非常差、差、正好、好、非常好,如图4所示。

图4 LQI的隶属度函数
根据经验,为控制器制定如下5条模糊规则:
①If(LQI is VBAD)then(Δp is BUSTEP)
②If(LQI is BAD)then(Δp is SUSTEP)
③If(LQI is PERFECT)then(Δp is HOLD)
④If(LQI is GOOD)then(Δp is SDSTEP)
⑤If(LQI is VGOOD)then(Δp is BDSTEP)
解模糊器中Δp的隶属度函数被分为5个模糊集合BUSTEP、SUSTEP、HOLD、SDSTEP、BDSTEP,分别表示大幅提高功率值、小幅提高功率值、保持功率值不变、小幅降低功率值、大幅降低功率值,如图5所示。

图5 Δp的隶属度函数
6.2 仿真实验分析
本节比较分析实验得到的仿真结果,包括距离固定和距离变化的点对点模型下非自适应模糊功率控制和DAFPC算法的比较,以及多节点网络模型下COMPOW、非自适应模糊功率控制和DAFPC算法网络生存时间的比较。
6.2.1 距离固定的点对点模型下不同算法的比较
图6、图7给出在距离固定的点对点模型中,非自适应模糊功率控制和DAFPC算法得到的LQI、发射功率的变化情况。
从图6、图7可以看出,非自适应模糊功率控制和DAFPC算法分别对发射功率进行调整使得接收到的LQI值与期望的LQI值的误差尽可能地小。DAFPC算法中LQI和发射功率的值在5 s左右收敛到期望值,然而非自适应模糊功率控制算法中LQI和功率的值在 12s时才收敛到期望值。显然,DAFPC算法比非自适应模糊功率控制的收敛速度更快,有利于适应网络的动态变化。因此可以得出,本文提出的DAFPC算法收敛性优于非自适应模糊功率控制算法。
6.2.2 距离变化的点对点模型下不同算法的比较
在距离变化的点对点模型中,发射节点与接收节点间的距离从40 m开始每20 s随机减少0~3 m的距离。图8和图9分别给出了在距离变化的点对点模型中非自适应模糊功率控制和DAFPC算法得到的LQI、发射功率的变化情况。
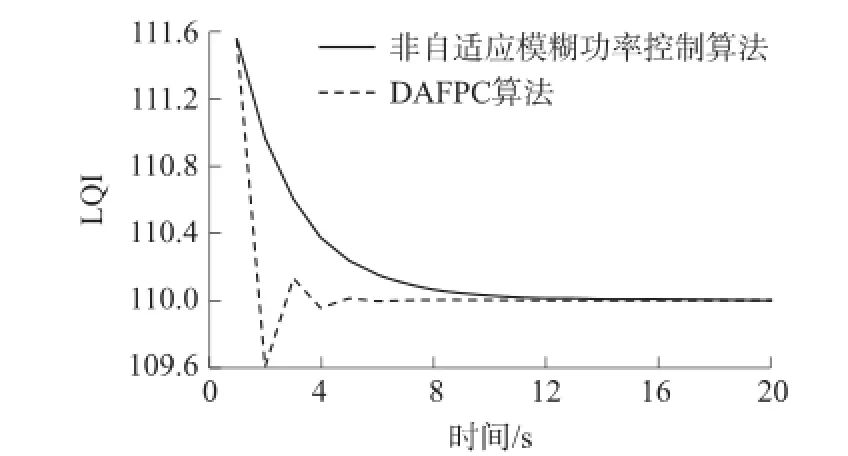
图6 固定距离下非自适应模糊功率控制和DAFPC的LQI比较
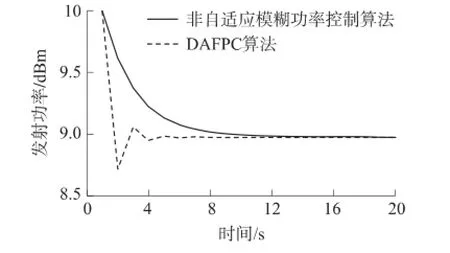
图7 固定距离下非自适应模糊功率控制和DAFPC的发射功率比
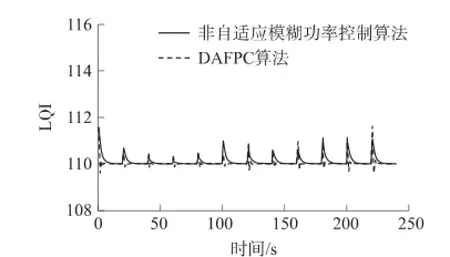
图8 变化距离下非自适应模糊功率控制和DAFPC的LQI比较

图9 变化距离下非自适应模糊功率控制和DAFPC的发射功率比较
从图8、图9可以看出,当网络发生动态变化,这里指节点间的距离变化时,DAFPC算法能更快地将LQI值调整到与期望值接近,因此网络的抗干扰性更好。并且DAFPC算法中的平均发射功率并没有大于非自适应模糊功率控制中的平均发射功率。当节点间距离变化时,节点间的网络以及链路质量会受到影响,在这种情况下,本文提出的算法仍能保证链路质量,适应网络的动态变化。
6.2.3 不同算法网络生存时间的比较
从网络的生存时间角度出发,对COMPOW、非自适应模糊功率控制以及DAFPC算法在多节点网络模型下进行仿真实验。假设当存活节点数小于30个(不包括簇头节点),则网络死亡。实验结果如图10所示。

图10 不同算法网络生存时间的比较
从图10可以看出,随着仿真时间的增加,3种算法的存活节点数均在某个拐点处开始减少,直到网络死亡。其中模糊功率控制算法相比固定功率控制算法延长了网络的生存时间。在本文的仿真环境下,节点分布相对比较均匀,非自适应模糊功率控制算法的网络生存时间相比于COMPOW算法的网络生存时间大约提高了10%。DAFPC算法的网络生存时间相比于COMPOW算法的网络生存时间大约提高了11%。总体来看,DAFPC算法相比于COMPOW,节省了节点的能耗,延长了网络生存时间。并且DAFPC算法能耗没有大于非自适应模糊功率控制算法的能耗。而由之前得到的仿真结果可知DAFPC算法抗干扰性能强于非自适应模糊功率控制算法,能适应网络的动态变化。
6.2.4 不同算法簇间干扰的比较
从簇间干扰的角度出发,对COMPOW、非自适应模糊功率控制以及DAFPC算法在多节点网络模型下进行仿真实验。每轮随机选取20个传感器节点进行通信,图11为3种算法100轮内产生簇间干扰的节点数比较图。

图11 不同算法簇间干扰的比较
从图11可以看出,由于COMPOW算法中每个传感器节点统一采用全网连通的最大功率,因此簇间干扰较大,产生簇间干扰的节点平均数占通信节点的比例约为63%。非自适应模糊功率控制算法中该比例约为20.1%。而DAFPC算法中产生簇间干扰的节点平均数占通信节点的比例仅为8.5%。DAFPC算法减小簇间干扰的效果明显。
7 总结
本文基于无线传感器网络动态性和传输能耗,提出了一种自适应模糊功率控制算法DAFPC。该算法采用模糊控制理论,应用自适应模糊控制方法。仿真结果表明它可以有效地提高链路的抗干扰性和传输可靠性;并且减少了节点的能耗,延长了网络的生存时间。DAFPC算法能适应网络的动态变化,使系统具有更好的鲁棒性。这为解决无线传感网络传输可靠性问题提供了一个新的思路和研究方向。
[1] 阿基迪兹,沃安.无线传感器网络[M].徐平平,刘昊,褚宏云,等译.北京:电子工业出版社,2013.
[2] Xiao Y,Peng M,Gibson J,et al.Tight Performance Bounds of Multihop Fair Access for MAC Protocols in Wireless Sensor Networks and Underwater Sensor Networks[J].IEEE Transactions on Mobile Computing,2012,11(10):1538-1554.
[3] Liu J,Zhou Z,Peng Z,et al.Mobi-Sync:Efficient Time Synchronization for Mobile Underwater Sensor Networks[J].IEEE Transactions on Parallel and Distributed Systems,2013,24(2):406-416.
[4] Lin S,Zhang J,Zhou G,et al.ATPC:Adaptive Transmission Power Control for Wireless Sensor Networks[C]//Proceedings of the 4th ACM Conference on Embedded Networked SensorSystems Boulder,2006:223-236.
[5] Mohammad Saiful Islam.Reliable Wireless Sensor Networks Using Multiple Sinks and Degree Constrained Shortest Path Trees[D]. Canada:University of Alberta,2013.
[6] Marchi B,Grilo A,Nunes M.DTSN:Distributed Transport for Sensor Networks[C]//IEEE Symposium on Computers and Communications,2007:165-172.
[7] Park S,Vedantham R,Sivakumar R,et al.Garuda:Achieving Effective Reliability for Downstream Communication in Wireless Sensor Networks[J].IEEE Transactions on Mobile Computing,February 2008,7(2):214-230.
[8] Yang O,Heinzelman W.Sleeping Multipath Routing:A Trade-off Between Reliability and Lifetime in Wireless Sensor Networks [C]//Proceedings of Global Telecommunications Conference,2011:1-5.
[9] Deb B,Bhatnagar S,Nath S.ReInForM:Reliable Information ForwardingUsing Multiple Pathsin SensorNetworks[C]// Proceedings of the 28th Annual IEEE International Conference on Local Computer Networks,2003:406-415.
[10]Park T,Kim S Y,Kwon G.Multi-block FEC for Reprogramming Wireless Sensor Networks[J].Electronics Letters,2013,49(14):905-907.
[11]Narayanaswamy S,Kawadia V,Sreenivas R S.Power Control in Ad-hoc Networks:Theory,Architecture,Algorithm and Implementation ofthe COMPOW Protocol[C]//Proceedingsofthe European Wireless Conference 2002,Florence,2002:156-162.
[12]Aaron Phillippe Toll.Fuzzy Control System[M].Ceed Publishing,2012.
[13]Jiang T,Wu P,Shen B,et al.A Novel Fuzzy Algorithm for Power Control of Wireless Sensor Nodes[C]//Proceedings of the 9th International Symposium on Communication and Information Technology,2009:64-68.
[14]Sanchez E R,Montrucchio B,Murillo L M,et al.Adaptive Fuzzy-MAC for Power Reduction in Wireless Sensor Networks[C]//Proceedings of the 4th IFIP International Conference on New Technologies,Mobility and Security(NTMS),2011:1-5.
[15]陆亚芳,易可夫,冯绪,等.基于模糊理论的无线传感器网络多层分簇式路由算法[J].传感技术学报,2014,27(7):933-938.
[16]刘超,刘丽萍,安新升,等.基于模糊控制的太阳能驱动无线传感器网络路由算法[J].传感技术学报,2014,27(9):1238-1246.
[17]Mamdani E H.Application of Fuzzy Logic to Approximate Reasoning Using Linguistic Synthesis[J].IEEE Transactions on Computers,1977,100(12):1182-1191.
[18]Hsueh Y,Su S.Learning Error Feedback Design of Direct Adaptive Fuzzy Control Systems[J].IEEE Transactions on Fuzzy Systems,2012,20(3):536-545.
[19]LAN/MAN Standards Committee.Part 15.4:Wireless Medium Access Control(MAC)and Physical Layer(PHY)Specifications for Low Rate Wireless Personal Area Networks(LR-WPANs)[S]. IEEE Computer Society,2006.
[20] Cao Q,He T,Fang L,et al.Efficiency Centric Communication Model for Wireless Sensor Networks[C]//Proceedings of the 25th IEEE International Conference on Computer Communications,2006:1-12.
[21]Diedrichs A L,Robles M I,Bromberg F,et al.Characterization of LQI Behavior in WSN for Glacier Area in Patagonia Argentina [C]//Proceedings of 2013 Fourth Argentine Symposium and Conference on SASE/CASE,2013:1-6.
[22]Wang L X.Fuzzy Systems are Universal Approximators[C]//Proceedings of IEEE International Conference on Fuzzy Systems,1992:1663-1170.
[23]Castro J L.Fuzzy Logic Controllers are Universal Approximators [J].IEEE Transactions on System,Man,Cybern,1995,25(4):629-635.
[24]王立新.模糊系统与模糊控制教程[M].北京:清华大学出版社,2003.

邵奇可(1977-),男,汉族,浙江工业大学计算机科学与技术学院副教授,主要研究方向为网络控制,无线传感网络,sqk@zjut.edu.cn;

冯淑娜(1990-),女,汉族,浙江工业大学计算机科学与技术学院硕士,主要研究方向为无线传感网络,模糊控制,islysn@gmail.com。

毛科技(1979-),男,汉族,浙江工业大学计算机科学与技术学院讲师,博士,主要研究方向为无线传感网络,数据挖掘,maokeji@zjut.edu.cn;
A Dynamic Adaptive Fuzzy Algorithm for Power Control in Wireless Sensor Networks*
SHAO Qike*,FENG Shuna,MAO Keji
(Department of Computer Science and Technology,Zhejiang University of Technology,Hangzhou 310023,China)
The transmission reliability problem is a fundamental challenge of wireless sensor networks(WSN)due to environmental interference and network dynamics.Existing methods on transmission reliability for WSN with highenergy consumption are unaware of the network dynamics and lead to non-adaptive patterns.To solve this problem,a dynamic adaptive fuzzy algorithm for power control(DAFPC)in wireless sensor networks is proposed in this paper,which is based on the adaptive fuzzy control theory and the input-output-feedback mechanism.In our algorithm,the controller structure and the transmit power are adjusted adaptively according to the link quality.Simulation results show that DAFPC can adapt to the dynamic changes of the network,effectively enhance anti-interference performance and transmission reliability of WSN,reduce nodes'energy consumption and prolong the network lifetime.
wireless sensor networks;adaptive fuzzy theory;power control;transmission reliability;anti-interference;network lifetime EEACC:6150P
TP393
A
1004-1699(2015)04-0563-09
10.3969/j.issn.1004-1699.2015.04.019
项目来源:国家自然科学基金项目(61104095)
2014-10-10 修改日期:2015-01-06
猜你喜欢
移动通信(2021年5期)2021-10-25
空间科学学报(2020年3期)2020-07-24
纺织科学研究(2020年1期)2020-05-21
无线互联科技(2017年24期)2018-01-22
制造技术与机床(2017年6期)2018-01-19
中国管理信息化(2017年18期)2018-01-04
物联网技术(2017年2期)2017-03-15
舰船科学技术(2015年8期)2015-02-27
中国交通信息化(2014年3期)2014-06-05
组合机床与自动化加工技术(2014年12期)2014-03-01