地面侦察雷达目标威胁度评估方法研究
2015-11-16 11:30史小斌顾红苏卫民董天琦陈绪龙
兵工学报 2015年6期
史小斌,顾红,苏卫民,董天琦,陈绪龙
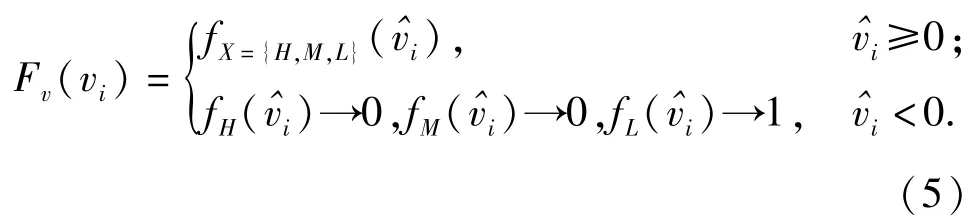
(1.南京理工大学光电学院,江苏南京210094;2.西安电子工程研究所,陕西西安710100)
地面侦察雷达目标威胁度评估方法研究
史小斌1,2,顾红1,苏卫民1,董天琦2,陈绪龙2
(1.南京理工大学光电学院,江苏南京210094;2.西安电子工程研究所,陕西西安710100)
根据目标状态参数和身份识别结果,对目标的威胁度进行评估是地面侦察雷达急需解决的问题。基于地面侦察雷达的目标属性集,利用隶属度函数、专家知识和贝叶斯网络构建了地面侦察雷达动态威胁度贝叶斯评估模型。经仿真验证,目标威胁度评估数据变化特征符合人的推理过程,对于多功能相控阵雷达,可根据目标威胁度自适应调度波束实现对目标的跟踪。
系统评估与可行性分析;目标威胁评估;地面侦察雷达;动态贝叶斯模型
0 引言
地面侦察雷达工作环境复杂,目标类型多样、运动特征多变,根据目标状态参数和身份识别结果,对目标的威胁度进行评估是地面侦察雷达急需解决的关键问题之一。基于目标威胁评估的结果,可实现传感器资源有效合理的分配,从而提高系统资源的效能[1]。
目前常用的目标威胁评估方法主要包括模糊逻辑[2-5]、神经网络和多属性决策方法以及证据、贝叶斯网络理论[6-7]等。这些方法大多需要引入专家知识构建规则或者推理网络,从认知学角度上讲,它们是根据已知战场信息以及数据的融合处理,形成对目标威胁度评估过程的思维。贝叶斯网络类似神经元网络,能够描述人类的推理过程,适用于复杂环境下目标的威胁度评估;相对模糊逻辑而言,贝叶斯理论有严格的数学和统计学基础,其推理模型具有通用性,可有效地将先验和后验信息统一起来,使得评估结果具有时间连续性和累计性,便于动态延伸[8]。
当前关于空中目标威胁度评估的文献较多[9-11],但也没有相对成熟的方法。地面侦察雷达目标威胁度评估的文献少,也很难直接借鉴空中目标威胁度评估的研究成果,这是由于地面侦察雷达和防空雷达应用方式不同,地面目标和空中目标的运动特征、对抗方式也区别很大。如地面侦察雷达可用于对重点区域防护,也可抵进敌方阵地侦察,防空雷达主要进行空域防护且要和其他防空传感器相互支撑。地面目标主要指武装坦克、装甲车辆、武装单兵和集结部队等,空中目标则指轰炸机、直升机和巡航导弹和反舰导弹等。目前,国内研制的地面战场侦察雷达和国外同类型雷达相比较,技术水平还存在着一定的差别,这主要体现在目标分类识别技术、目标多特征参数提取技术(如目标极化信息)和目标数据融合技术。本文是基于现有地面战场侦察雷达可获得的目标参量(如距离、速度、目标雷达散射截面(RCS))基础上,根据雷达监视区域的敌我态势分布,采用专家知识、模糊数学方法得到目标先验决策知识和目标属性的隶属概率,构建贝叶斯动态模型,进行目标威胁度评估,从而给出地面战场侦察雷达目标威胁评估的一种可行方法和思路,同时也可根据目标威胁度更加有效地管理地面侦察雷达资源,从而提高系统资源的效能。
1 地面目标静态威胁度评估
1.1 地面目标威胁属性集
威胁度评估的首要问题是确定决策属性集。由于地面侦察雷达的主要任务是监视敌方动态,保护我方安全,因此地面侦察雷达威胁度评估是根据我方阵地具体分布,对敌方目标形成的威胁度预先做出判断,给我方指挥员提供决策支持。在跟踪情况下,地面侦察雷达可获得目标坐标、速度(位移速度和径向速度)、回波幅度和干扰能力等参数,进而依据目标位移速度变化量计算目标的机动性,依据回波幅度和速度估计目标的大小或类型。则目标威胁度评估属性集设为:目标类型{T1:装甲车辆,T2:中型车辆,T3:武装单兵}、距离{R1:远,R2:中,R3:近}、面向速度(朝向我方目标的速度){v1:高,v2:中,v3:低}和干扰能力{G1:强,G2:中;G3:弱}。
1.2 地面目标参数威胁隶属度
设一部地面侦察雷达架设于坐标原点(0,0),监视着我方指挥所、兵营和战略物资储备区等重要场所周边情况,其坐标分别为(x0,y0)、(x1,y1)、(x2,y2).某时刻,侦察雷达发现并跟踪了4批可疑目标,敌、我态势分布如图1,表示目标。其中,目标1和目标2类型不同,目标3已进入我方兵营防护区域,目标4同时威胁我方指挥所和战略物资储备区。分析敌、我态势可得:目标1和目标2距我方指挥所、兵营和战略物资储备区较远,构成的威胁度较低;目标3已对兵营形成很高的威胁,需调度武器平台应对;目标4同时威胁指挥所和战略物资储备区,具有较高的威胁度;由于指挥所、兵营和战略物资储备区重要度不同,也应分层次看待目标对其的威胁度。上述目标威胁度的评估是基于人的主观判断,且模糊度很高。数据融合的数学方法是利用概率描述模糊证据,威胁隶属度函数是以概率的观点描述目标参数的聚类特征,其包括高斯隶属度、三角隶属度等函数。例如:目标距指挥所10 km时,其对指挥所的高威胁隶属度H、中威胁隶属度M和低威胁隶属度L概率分别为:0.001,0.425、0.581.
图1 敌、我双方目标态势假象图Fig.1 Situation illusion view of the enemy and friend targets
地面侦察雷达以高斯模糊度函数作为威胁隶属度函数,表达式为

式中:c和δ为威胁隶属度函数参数。
1.2.1 距离威胁隶属度
设指挥所、兵营和战略物资储备区有远区、中区和近区3种威胁距离,分别用R1、R2和R3表示,其中远区以外威胁度为0,近区以内威胁度为1.不同类型目标的攻击和机动能力不同,其威胁临界距离也应不同。依据装甲车辆、中型车辆和武装单兵目标运动特点,远区、中区和近区威胁距离如表1所示。
表1 不同类型地面目标的威胁距离Tab.1 Threat distances of different ground targets
根据不同类型目标的威胁距离,可得到目标距离威胁隶属度函数
敌方目标(x,y)和我方目标(xj,yj)距离

式中:dj是敌方至我方距离;dj,max是低威胁度距离,即低威胁度时的最大距离,当敌方目标距离大于该距离时,fH(dj)→0,fM(dj)→0,fL(dj)→1;dj,min为高威胁度距离,即高威胁度时的最小距离,当敌方目标距离小于该距离时,fH(dj)→1,fM(dj)→0,fL(dj)→0;j为目标类型,表示为装甲车辆、中型车辆和武装单兵。当目标距离在dj,min和dj,max之间时,敌方目标距离对应的高、中、低威胁度由(1)式高斯隶属度函数决定,在(2)式中表示为fX={H,M,L}(dj).如图1所示,我方据点的外线圈为低威胁临界距离,点划线小圈为高威胁距离。
根据高斯隶属度函数,可得如图2目标距离高、中、低高斯威胁隶属度曲线。
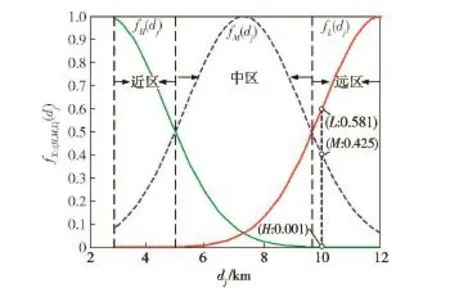
图2 距离高斯威胁隶属度模型(装甲车、中型车辆)Fig.2 Gauss membership model of distance(armoured vehicle and medium sized vehicle)
1.2.2 速度威胁隶属度
依据经验,武装单兵最大行进速度约为10 km/h,装甲车辆和中型车辆最大行进速度约为100 km/h;由于装甲车辆和中型车辆相对武装单兵的攻击能力更强,因此速度范围主要考虑30 km/h~100 km/h.当敌方目标进入我方近区威胁距离时,速度高威胁隶属度为1,此时认为敌方目标所做的任何机动均为攻击我方的动作。计算速度威胁度时采用的参数为面向速度(敌方目标面向我方目标的速度),计算目标面向速度是防止敌方目标迂回运动攻击我方。
面向速度的计算公式:
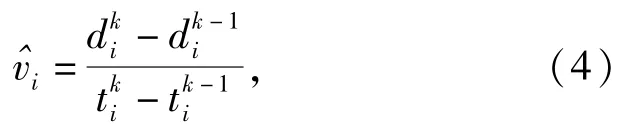
dj,min和dj,max之间时,敌方目标速度对应的高、中、低威胁度由(1)式高斯隶属度函数决定,表示为
根据高斯隶属度函数,可得如图3不同速度的目标高、中、低威胁隶属度曲线。其中当目标速度为40 km/h时,可看到该目标的高威胁度为(H:0.000 6),中威胁度为(M:0.306),低威胁度为(L:0.744)。
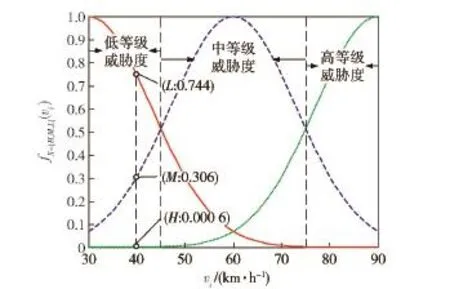
图3 速度高斯威胁隶属度模型Fig.3 Gauss membership model of velocity
1.2.3 目标电磁干扰能力隶属度
电磁干扰可提高敌方目标的生存能力。在地面战场相控阵雷达设计中,会预留一部分驻留时间用于探测侦察区域内敌方目标对雷达工作带宽频率的干扰情况。敌方干扰的目的是致盲我方雷达设备,因此可用侦察雷达侦察到的干扰信号幅度和该雷达接收机饱和信号幅度的比值来量化干扰程度,其公式表示为

式中:Ai为目标i的干扰信号幅度;ARmax为接收机饱和幅度。表示干扰高、中、低威胁隶属度高斯函数。当目标在近区时高威胁度最大,;目标在远区时低威胁度最大,
根据高斯隶属函数,可得如图4目标干扰幅度比高、中、低威胁隶属度曲线。例如当为0.7 dB时,干扰目标的高威胁度为0.787,中威胁度为0.271,低威胁度为0.000 5.
1.2.4 目标类型隶属度
目前,地面战场侦察雷达实现目标识别和分类难度很大。但目标类型又是目标威胁度很重要的特征数据,因此可针对地面战场典型目标,如武装单兵、中型车辆和装甲车辆的统计RCS特性,进行目标初步分类,在目标分类过程中还需考虑目标速度信息。
雷达作用距离公式:
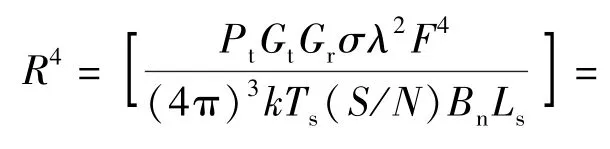
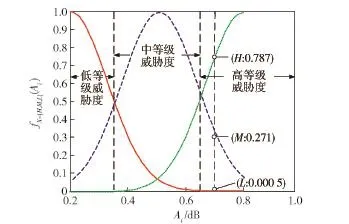
图4 干扰信号高斯威胁隶属度模型Fig.4 Gauss membership model of interference signal

式中:Pt为雷达发射功率;Gt、Gr分别为发射天线和接收天线增益;λ为雷达工作频率波长;F为方向图传播因子;(4π)3k为常数;Ts为雷达系统温度;Bn为雷达接收信号带宽;Ls为系统损耗;σ为目标RCS;为信噪比。
因此,得到目标RCS估计:

由于目标RCS起伏和雷达的参数不同,因此需要对装甲车辆、中型车辆和武装单兵进行RCS测试训练。根据RCS训练结果,估计目标类型。表2中的数据是基于经验知识所得。

表2 地面目标的RCS估计和目标类型Tab.2 RCS estimation and types of ground targets
根据高斯隶属度函数,可得如图5目标类型隶属曲线。其中当目标RCS为13 m2,武装单兵、中型车辆和装甲车辆隶属度分别约为2.7×10-7、0.84、0.04.
1.3 威胁度静态评估
进行威胁度评估时,专家系统基于目标参数形成威胁概率转移矩阵,转移概率可根据实际试验数据进行修正。专家系统转移概率矩阵如表3.
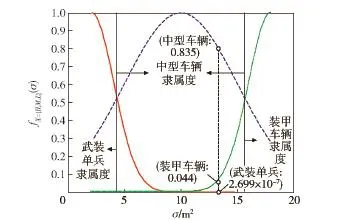
图5 目标类型高斯隶属度模型Fig.5 Gauss membership model of target type
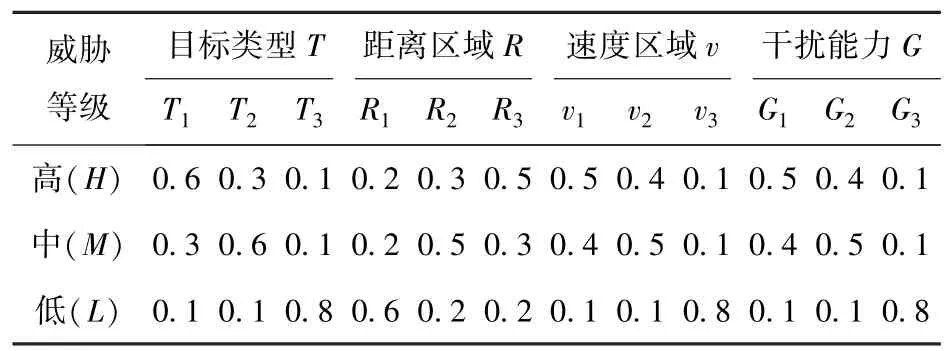
表3 转移概率矩阵Tab.3 Transition probability matrix
图6为目标威胁度静态评估模型。根据目标参数隶属度和转移概率(见表3),即可对目标进行威胁度静态评估。
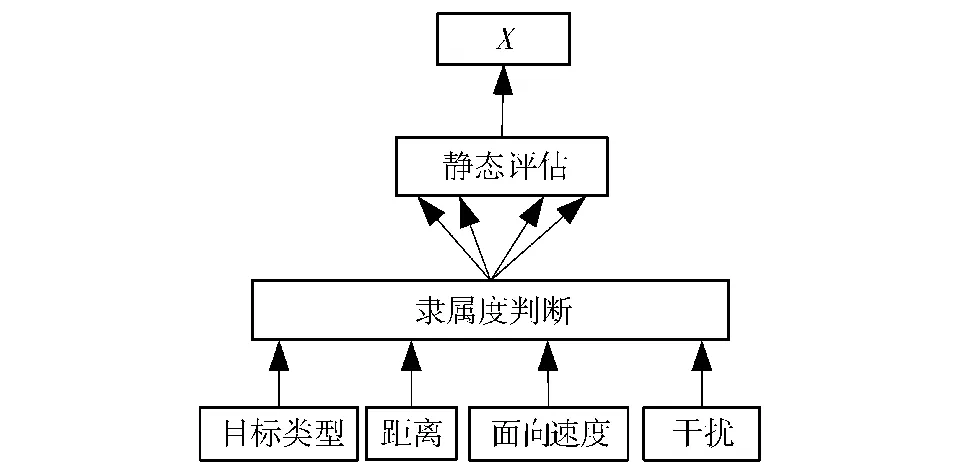
图6 目标威胁度静态评估模型Fig.6 Static evaluation model of target threat degree
目标威胁度静态评估的概率公式:

式中:X为目标威胁状态集{H,M,L}中某一状态,p(X|R)、p(X|v)、p(X|G)、p(X|T)分别为距离、速度、干扰能力和目标类型对不同威胁等级状态的概率值。
当某目标至指挥所10 km,距离威胁隶属度:R1: 0.001、R2:0.425、R3:0.581;面向速度为40 km/h,速度威胁隶属度:v1:0.000 6、v2:0.306、v3:0.744;干扰信号幅度和接收机饱和幅度比为0.7,干扰威胁隶属度:G1:0.787、G2:0.271、G3:0.000 4:目标RCS为13 m2,目标类型威胁隶属度:T1:2.699×10-7、T2:0.835、T3:0.044.该目标的高(H),中(M)、低(L)的威胁度概率为
根据计算结果可得该目标中等威胁度概率较大。
2 贝叶斯威胁度动态评估
静态威胁评估数据仅反映了当前时刻的威胁度,却没有考虑过去时刻目标威胁度对当前时刻威胁度的动态影响,这从人的逻辑上来讲是不合理的。动态贝叶斯网络(DBN)基于当前和过去时刻的信息进行综合推理,可有效反映目标威胁度的变化[7]。目前,贝叶斯网络和估计已应用于战场多传感器管理,多目标、多类型数据融合。
如图7,X1是时刻1通过静态评估所得的目标威胁度,X2是根据时刻1目标威胁度X1和时刻2所得的威胁度变化综合估计的目标威胁度,同样Xk+1是基于k时刻目标威胁度Xk和k+1时刻所得的变化威胁度变化综合估计的目标威胁度。
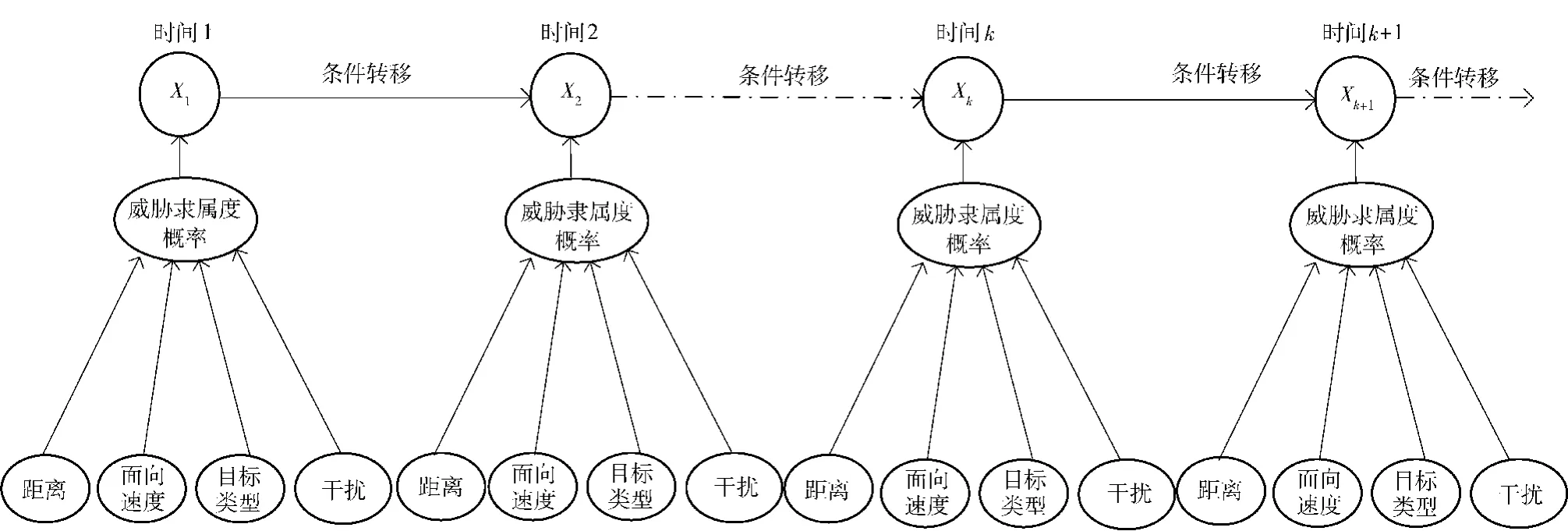
图7 贝叶斯动态网络模型Fig.7 Dynamic Bayesian network model
为反映先验信息的影响,同时确保动态模型对新息信息的灵敏度,威胁度状态转移概率采用了较低的条件转移概率,具体如表4所示。
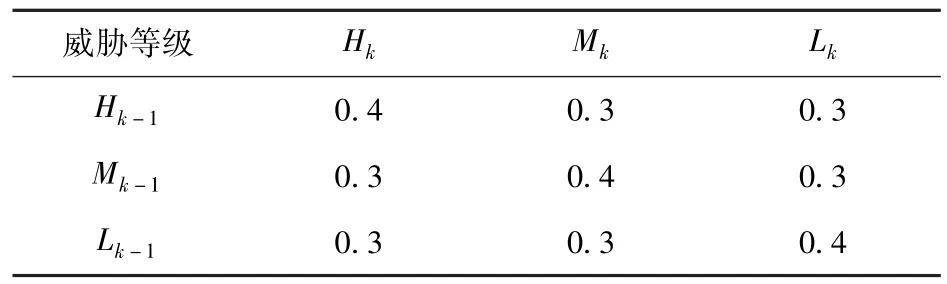
表4 威胁度条件转移概率矩阵p(Xk|Xk-1)Tab.4 Condition transition probability matrix of threat level p(Xk|Xk-1)
威胁等级转移概率公式如下:
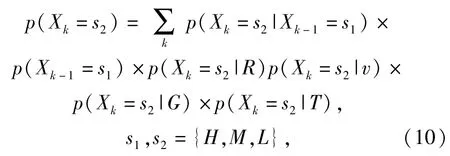
在初始时刻,由于目标威胁度的不确定性,因此假设初始目标威胁度先验信息为π(X0)={H(0.3),M(0.4),L(0.3)},下一时刻的测量参数产生的新息威胁度分别为
则根据威胁度条件转移概率矩阵和先验信息可得
则:
处理后的目标威胁度为:H(0.15),M(0.80),L(0.05),结果和静态威胁评估基本一致,这是由于初始时刻先验信息π(X0)存在较大的模糊度。
3 计算结果与比较
设侦察雷达观测到有一不明目标正快速向我方指挥所逼近,该目标距离指挥所12 km,根据目标幅度计算目标RCS约为10 m2,利用跟踪数据得到该目标逼近指挥所的速度约为50 km/h(逼近过程中,目标速度在11.7 km处由50 km/h变化为60 km/h,在8 km处速度增加为80 km/h),目标在逼近到指挥所8 km处突然释放干扰信号,干扰信号和接收机饱和幅度比约为0.4,目标初始概率为(H:0.4,M: 0.3,L:0.3).
图8表示目标从12 km处逼近指挥所时,不同等级威胁度概率的变化曲线,其中实线表示贝叶斯动态概率曲线,点划线表示静态概率曲线。动态和静态曲线的变化趋势表明:随着逼近距离的变小,目标低等级威胁度逐渐变小,中威胁和高威胁度逐渐增大,其中当目标逼近指挥所近距威胁区时,高威胁度快速增加,而中威胁度处于下降趋势。为了验证目标威胁度评估模型对目标新息的灵敏度,仿真时在11.5 km处目标速度由50 km/h机动为60 km/h,在8 km处目标速度进一步机动为80 km/h,且目标释放了较强的干扰信号。图8中·表示目标在11.5 km处机动时的威胁度概率,★表示目标在8 km处机动和电磁干扰我方时的威胁度概率。
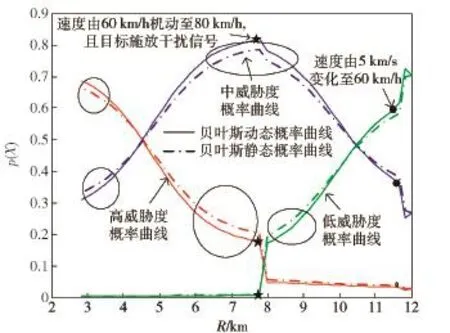
图8 目标逼近指挥所时高、中、低威胁度概率曲线Fig.8 High,medium and low threat degree probability curves for a target approaching the command post
在图8中贝叶斯动态威胁度概率数据曲线和静态威胁度概率数据曲线相比较,有如下特点:
1)动态威胁度概率采用了先前时刻的先验信息,其曲线比静态威胁度概率曲线变化平缓。如在11.5 km处目标速度由50 km/h机动为60 km/h时,低威胁度动态概率曲线(实线)下降比低威胁度静态概率曲线(点划线)平缓,中威胁度动态概率曲线(实线)也比中威胁度静态概率曲线(点划线)上升平缓。采用先验信息的动态威胁度概率可防止静态威胁度由于某些特征数据的畸变而产生威胁度概率误判现象。
2)先验信息对动态威胁度概率曲线变化趋势具有惯性作用的影响,即先验动态威胁度概率在具有增大或减小趋势时,当前威胁度概率变化斜率比静态概率变化斜率较陡,如图8圆形圈和椭圆形圈标示。
从表5数据可以看到:由于目标在12.0 km处速度较低且没有释放干扰信号,因此目标低威胁等级概率较高(70.4%);在11.7 km处目标速度增加为60 km/h,从而使得目标中威胁等级概率增加(55.3%);在8 km处目标速度进一步增加为80 km/h,且目标在逼近指挥所时释放了较强的干扰信号,因此导致目标的中威胁和高威胁概率快速增加。动态目标威胁度概率曲线的变化趋势和目标新息信息导致的目标威胁度概率数据阶跃变化的特征合乎人的推理过程。上述仿真过程仅考虑了单目标逼近指挥所时的目标威胁度,对于多目标的情况,各目标的威胁度判定过程和单目标一样,但各目标对指挥所、兵营和重要战略场所构成的权系数是不同的,因此可根据权系数给出不同不明目标对我方的威胁态势。
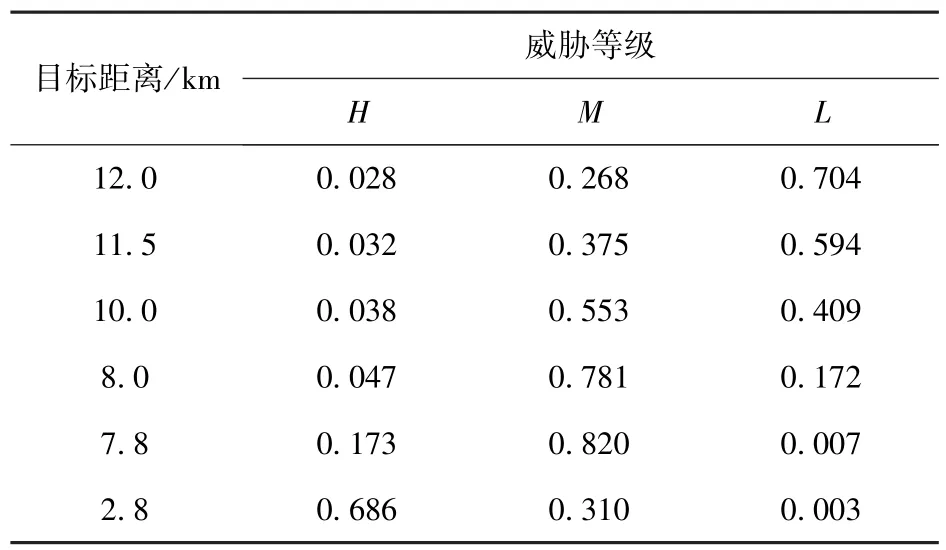
表5 部分动态仿真距离段威胁等级数据Tab.5 Simulation distances from threat level data
4 结论
地面战场目标的威胁度和态势评估是数据融合需要解决的关键问题之一,本文利用模糊隶属度函数和贝叶斯动态推理方法对不明目标的运动特征和属性进行威胁度概率评估。经仿真验证,数据变化特征符合人的推理过程,动态目标威胁度评估模型合理有效,且在工程应用上有较强的现实意义;对于多功能相控阵雷达,可根据目标威胁度自适应调度波束实现对威胁度高的目标进行精密跟踪,从而达到相控阵雷达资源的优化管理。
(
)
[1]Mahler R P S.多源多目标统计信息融合[M].范红旗,卢大威,刘本源,等,译.北京:国防工业出版社,2013. Mahler R P S.Statistical multisource-multitarget information fusion[M].FAN Hong-qi,LU Da-wei,LIU Ben-yuan,et al,translated.Beijing:National Defense Industry Press,2013.(in Chinese)
[2]范春彦,韩晓明,王献锋.基于最大隶属度的目标威胁评估与排序法[J].系统工程与电子技术,2003,25(1):47-48. FAN Chun-yan,HAN Xiao-ming,WANG Xian-feng.Target threat evaluating and sequencing method on the maximum degree of membership[J].Systems Engineering and Electronics,2003,25(1):47-48.(in Chinese)
[3]张银燕,李弼程,崔家玮.基于云贝叶斯网络的目标威胁评估方法[J].计算机科学,2013,40(10):127-131. ZHANG Yin-yan,LI Bi-cheng,CUI Jia-wei.Method of target threat assessment based on cloudy Bayesian network[J].Computer Science,2013,40(10):127-131.(in Chinese)
[4]王勤,田宇光,李加祥.基于多因子动态加权的反舰导弹威胁判断方法[J].战术导弹技术,2013(1):38-41. WANG Qin,TIAN Yu-guang,LI Jia-xiang.Anti-ship missile threaten estimate based on mutifactor dynamic weighting[J].Tactical Missile Technology,2013(1):38-41.(in Chinese)
[5]雷英杰,王宝树,王毅.基于直觉模糊决策的战场态势评估方法[J].电子学报,2006,12(34):2175-2179. LEI Ying-jie,WANG Bao-shu,WANG Yi.Techniques for battlefield situation assessment based on intuitionistic fuzzy decision[J]. Acta Electronica Sinica,2006,12(34):2175-2179.(in Chinese)
[6]Bladon P,Hall R J.Information fusion using bayesian multinets[C]∥Multisensor,Multisource Information Fusion:Architectures,Algorithms,and Applications.Bellingham,US:SPIE,2004:91-102.
[7]Okello N,Thorns G.Threat assessment using Bayesian networks[C]∥Proceedings of 6th International Conference of Information Fusion. Cairns,Queensland,Australia:IEEE,2003:1102-1109.
[8]姚跃亭,赵建军,万宇.贝叶斯网络下考虑攻击企图的目标威胁评估[J].火力与指挥控制,2012,37(5):63-67. YAO Yue-ting,ZHAO Jian-jun,WAN Yu.Threat assessment with attack attempt of target based on Bayesian network[J].Fire Control&Command Control,2012,37(5):63-67.(in Chinese)
[9]姜维,李一军.基于贝叶斯网络推理的导弹目标类型识别[J].计算机集成制造系统,2011,17(6):1264-1270. JIANG Wei,LI Yi-jun.Missile target type identification with Bayesian network[J].Computer Integrated Manufacturing Systems,2011,17(6):1264-1270.(in Chinese)
[10]柴慧敏,王宝树.态势评估中的贝叶斯网络模型研究[J].西安电子科技大学学报,2009,36(3):491-495. CHAI Hui-min,WANG Bao-shu,Research on the Bayesian networks model in situation assessment[J].Journal of Xidian University,2009,36(3):491-495.(in Chinese)
[11]邸若海,高晓光.模糊离散动态贝叶斯网络的目标威胁等级评估[J].火力与指挥控制,2012,37(4):14-17. DI Ruo-hai,GAO Xiao-guang.The threaten grade assessment model of target based on fuzzy discrete dynamic bayesian networks[J].Fire Control&Command Control,2012,37(4):14-17.(in Chinese)
Study of Target Threat Assessment for Ground Surveillance Radar
SHI Xiao-bin1,2,GU Hong1,SU Wei-min1,DONG Tian-qi2,CHEN Xu-long2
(1.Nanjing University of Science and Technology,Nanjing 210094,Jiangsu,China;2.Xi'an Electronic Engineering Research Institute,Xi'an 710100,Shaanxi,China)
The target threat assessment for ground surveillance radar based on the target state parameters and the identification results is an issue urgently to be solved.Based on the attribute set of targets,a dynamic Bayesian model of target threat assessment for ground surveillance radar is constructed by using membership function,expert knowledge and Bayesian network.Simulation results show that the variation characteristics of the target threat assessment data conform to the reasoning process of human.The dynamic Bayesian model of target threat assessment can be applied practically in the ground surveillance radars.Multifunction phased array radar can track the target in virtue of adaptive scheduling beam with target threat assessment.
system assessment and feasibility analysis;target threat assessment;ground surveillance radar;dynamic Bayesian model
TG156
A
1000-1093(2015)06-1128-08
10.3969/j.issn.1000-1093.2015.06.024
2014-07-03
国家部委基金项目(9140A07010713BQ02025);教育部博士点基金项目(20113219110018);国家自然科学基金项目(61302188、61471198);江苏省自然科学基金项目(BK20131005)
史小斌(1977—),男,博士研究生。E-mail:57027236@qq.com;顾红(1967—),男,教授,博士生导师。E-mail:guhong666@126.com
猜你喜欢
中学生数理化·中考版(2022年6期)2022-06-05
中学生数理化·中考版(2021年6期)2021-11-22
新世纪智能(数学备考)(2021年4期)2021-08-06
新世纪智能(数学备考)(2021年4期)2021-08-06
法律方法(2021年4期)2021-03-16
法律方法(2021年4期)2021-03-16
红领巾·探索(2020年5期)2020-05-19
智富时代(2018年11期)2018-01-15
智富时代(2018年11期)2018-01-15
北京信息科技大学学报(自然科学版)(2016年6期)2016-02-27