
计划航线避离危险物的安全距离问题*
2015-11-14 03:20:20大连海事大学航海学院冯纪军
世界海运 2015年7期
大连海事大学航海学院 张 杰 戴 冉 冯纪军
沿岸航行是几乎所有船舶整个航次中必不可少的部分,其自然条件和交通条件等交通环境复杂,航线附近的危险物、障碍物较多,水深有时较浅,因此驾驶人员必须谨慎对待。为确保船舶航行的安全,在安全的前提下达到经济,同时为保证航行计划的顺利实现,必须合理地设计航线。[1]其中,航线附近的危险物是航线设计过程中主要考虑的因素之一。尤其在交通环境复杂、船舶交通流密度大的沿海水域,合理设定航线避离危险物的最佳安全距离对船舶航行的安全至关重要,对整个沿海水域高效、有序、平安的海上交通起到决定性作用。
经过大量实船(不同种类不同吨级的船舶约6000艘)统计,98%以上的船舶在设定航线避离危险物安全距离时都考虑了五点要素:定位、海图测量精度、能见度情况、风流对航行的影响以及船舶操纵性能。[1]但是,每个因素对安全距离的影响程度随着船舶类型、吨级的不同而不同,尚不能具体量化。
本文在考虑上述五点影响因子的基础上,从航行中船舶实际操纵的角度,分析船舶航行和避让过程中占用的通航水域大小,进而确定安全距离。
一、船舶航行状态
船舶沿计划航线航行过程中,通常有两种操纵状态:船舶航行操纵和船舶避碰操纵。
1.船舶航行操纵
船舶航行操纵主要是为了解决航路航线保持的问题。船舶在海上航行过程中,除特殊情况外,通常不会随意改变航速,故该航行状态主要为保向操纵。船舶在直线航行过程中受到某种扰动而改变了原航向,通过操纵能使船舶恢复在原航向上做直线运动,这种运动性能称为船舶保向性。通过操纵(小舵角)使船舶在短时间内就能恢复原航向的直线运动,我们认为其保向性好,反之则保向性差。
2.船舶避碰操纵
船舶避碰操纵主要是为了解决短时间船舶避险的问题。《1972年国际海上避碰规则》规定,当我船为让路船或者责任船,而且有碰撞危险时,我船需要采取避让行动。[2]通常做法是采用转向避让。船舶在海上转向避碰操纵通常分两种情况:
(1)小角度转向避让。通常在对遇状态或交叉相遇状态,经过船舶之间良好的沟通,将船舶航向改变一定的角度(一般不超过20°),船舶在新航向航行一段时间,碰撞危险或紧迫局面即可解除。随后,船舶转向回归到原航行。
(2)大角度转向避让。通常在交叉相遇状态,船舶双方沟通不及时或错过最佳避让时机,船舶需要大角度转向甚至旋回方可解除碰撞危险。
二、航行中船舶占用通航水域
船舶在海上航行过程中,在保证安全的前提下应确保经济。尽管驾驶员尽可能沿计划航线航行,但船舶实际航行过程中,无论是航行操纵还是船舶避碰操纵,都要占用计划航线外的部分通航水域。[3]
(一)船舶航行操纵中占用通航水域
船舶在海上航行时,由于受到外界自然条件、船舶特征和人为因素的影响,为了保证船舶沿计划航向航行,其航行轨迹在计划航线左右摆动,呈蛇形前进,所占用的宽度为航迹带宽度。
航迹带宽度可以分为两个部分,如图1所示,一为船舶航行中在航迹附近的左右偏移量,二是船舶本身占用的航道空间。
参照《海港总体设计规范》(JTS 165-2013),[4]航迹带宽度为

其中:A为航迹带宽度;n为船舶漂移倍数;L为船舶长度;γ为风、流压偏角;B为船舶宽度。航迹带宽度即为船舶航行操纵占用的通航水域范围。
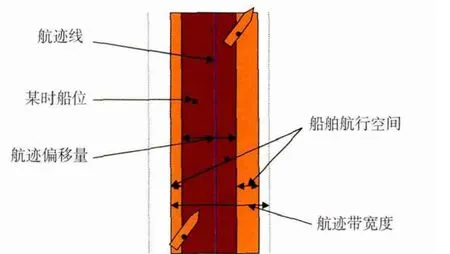
图1 航迹带宽度示意图
(二)船舶避碰操纵中占用通航水域
1.小角度转向避让
无论是对遇状态还是交叉相遇状态,船舶之间都应经过充分良好的沟通,及时作出避让措施,船舶转向后航行至与他船相距一定距离(如图2所示),确保碰撞危险或紧迫局面解除。[5]
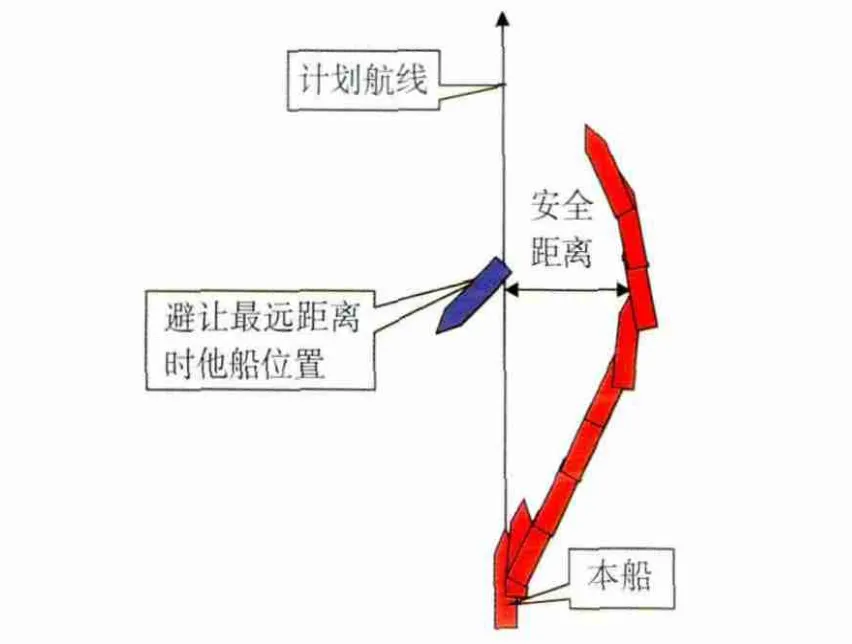
图2 小角度避让示意图
2.大角度转向避让
大角度转向避让分两种情况:一是改变一定的角度(通常大于20°);二是船舶通过旋回达到避让的效果。
(1)改变一定的角度(通常大于20°)。
受人为因素和环境因素的共同影响,在某些交叉相遇状态,本船航向需作出大角度改变方可解除碰撞危险。这种情况的避让方式与小角度转向避让类似,但是由于本船航向改变较大,驶过让清他船可能偏离计划航线较远。
(2)船舶旋回。
在某些船舶会遇局面,由于人为操作不当,导致产生紧迫局面,本船必须旋回才能解除该危险局面。该情况船舶占用的通航水域为计划航线外船舶的旋回水域,回转初径可以用来估算船舶用舵旋回掉头所需的水域。见图3。
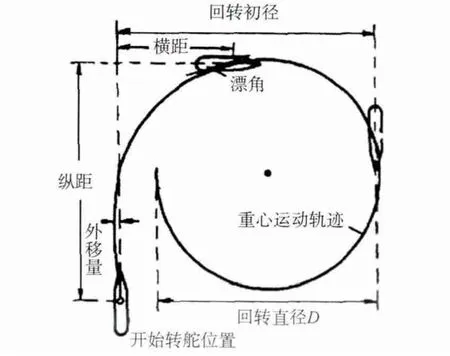
图3 船舶旋回避让示意图
三、基于大型船舶操纵模拟器的计划航线避离危险物安全距离分析
作者统计了曾参与过的全国沿海30多条航道船舶操纵模拟实验,由于各航道的功能定位不同,按照不同类型不同吨级船舶,考虑多种风、流条件的通航环境,约1000次实验情况如下:船型主要有杂货船、散货船、集装箱船、油船、滚装船、化学品船、液化气船和客船;船舶吨级分布于1000 t级至30万t级不等,以大型新型船舶为主;航道包括单向航道和双向航道,以双向航道为主;考虑到船舶实际航行海域情况,模拟实验包括单船模拟操纵和船舶对抗模拟操纵;考虑到人为因素影响,船舶操纵包括非故意延迟操纵和故意延迟操纵。
运用SPSS软件对约1000次实验结果统计分析,针对不同船舶操纵(航行和避让)情况得出95%累计频率的安全距离值,该值略小于当前营运中各类船舶实际设定值。因此,考虑到模拟实验与实际船舶操纵存在差异,驾驶人员模拟操纵时的心理压力较小,作者汲取多位资深引航员和船长的经验,赋予统计结果扩大系数1.2,最终得出相对合理的计划航线避离危险物的安全距离。
(1)船舶航行操纵中,计划航线避离危险物的安全距离为航迹带宽度。
(2)小角度转向避让操纵中,通过改变一定的角度(通常小于20°),计划航线避离危险物的安全距离为1 n mile(狭窄水域除外)。否则,其最初作出小角度避让的决策是欠合理的。
(3)大角度转向避让操纵中,通过改变一定的角度(通常大于20°),计划航线避离危险物的安全距离为2 n mile。
(4)当船舶需要旋回操纵来达到避让的目的时,此为非良好船艺,而且恰好在危险物附近旋回避让的概率更低,从拟定计划航线的角度考虑,不应纳入设定计划航线避离危险物安全距离的主要考虑因素。但船舶实际航行过程中,该情景也偶有发生,许多船员都有亲身经历。尤其是在交通繁忙的水域,特别是和渔船协调避让的时候,渔船时常不按规则航行,甚至“出尔反尔”,还有部分大船人为操作不当,这都给大船造成很大的避让压力。因此,驾驶员拟订航线的时候,应考虑到该特殊情景。船舶旋回避让操纵中,计划航线距离危险物的安全距离至少为船舶旋回初径(与施舵舵角有关)。
四、结束语
在拟订计划航线时,驾驶人员并不知道本次航行是否需要小角度或者大角度转向避让。通常,在通航密度较小的水域,设定计划航线避离危险物的安全距离主要考虑航行操纵和小角度转向避让的情况;在通航密度相对较大的水域,安全距离的设定需要重点考虑到大角度转向避让的情况。因此,驾驶人员应根据不同航段的通航情况,参照本论文分析的船舶各种航行情景占用的通航水域,合理设定计划航线避离危险物的安全距离。
[1]郭禹,张吉平,戴冉.航海学[M].大连:大连海事大学出版社,2014.
[2]洪碧光.船舶操纵:英文版[M].大连:大连海事大学出版社,2012.
[3]李源惠,潘明阳,吴娴.基于动态网格模型的航线自动生成算法[J].交通运输工程学报,2007(3):34-39.
[4]JTS 165-2013海港总体设计规范[S].北京:人民交通出版社,2014.
[5]夏雷,姜汉心,汪柱.电子海图最优航线自动生成算法的改进[J].海洋测绘,2012(2):43-45.
猜你喜欢
疯狂英语·新读写(2021年6期)2021-08-05 07:49:10
水上消防(2020年5期)2020-12-14 07:16:14
文史春秋(2019年11期)2020-01-15 00:44:36
青年歌声(2019年12期)2019-12-17 06:32:32
智能城市(2018年7期)2018-07-10 08:30:00
北京航空航天大学学报(2017年7期)2017-11-24 05:27:33
中学生英语(2017年6期)2017-07-31 21:28:55
青年歌声(2017年6期)2017-03-13 00:57:56
北京航空航天大学学报(2016年6期)2016-11-16 01:50:52
舰船科学技术(2015年8期)2015-02-27 15:38:47
