
基于显微视觉的沥青路面微观纹理三维重构
2015-11-05 00:31:54邹丽琼周兴林胡怡玮
武汉科技大学学报 2015年4期
邹丽琼,周兴林,胡怡玮
(1.武汉科技大学汽车与交通工程学院,湖北 武汉,430081;2.中铁第四勘察设计院集团有限公司道路交通设计研究院,湖北 武汉,430063)
路面微观纹理构造对路面的耐磨性和抗滑性、轮胎的磨损、轮胎与路面的接触噪声等多个方面产生影响[1]。检测沥青路面微观纹理是进行沥青路面性能相关研究的必要前提。
在目前常用的沥青路面形貌检测方法中,基于激光聚焦跟踪原理的检测法只适合于实验室检测,且不能直观反映出沥青路面的三维形貌特征[2];基于激光三角测量原理的检测法可快速、精确地获得沥青路面宏观纹理,但只能得到二维的测量数据,不能获取全面的沥青路面三维形貌[3-4];基于光学成像的检测方法要么不能直观反映路面三维微观形貌,要么测量精度低、程序复杂、操作繁琐,其应用有一定的局限性[5-7]。
针对上述问题,本文提出了基于显微视觉的沥青路面三维重构方法。该方法以激光三角测量原理为基础,利用立体显微镜采集序列图像进行图像处理,并结合Delaunay三角剖分算法实现沥青路面三维微观纹理的快速可视化。
1 检测方法及三维成像原理
1.1 检测方法
基于显微视觉的沥青路面微观纹理测量系统由与立体显微镜尾部相连的CCD摄像机、自动载物台、与竖直方向成45°的线激光发射器、步进电机和计算机组成,如图1所示。

图1 测量系统结构示意图Fig.1 Schematic diagram of the measuring system
具体检测步骤为:将沥青试件放在自动载物台上,激光器发出线光条投射在试件表面,形成与试件表面相交的光条三维图像;控制自动载物台向前运动一个步长50μm,并输出触发信号给CCD摄像机,摄像机立即拍摄沥青试件表面上形成的光条显微图像,该图像既包括沥青试件表面二维信息,又包含线激光的空间信息;光条显微图像经过计算机中的沥青路面微观形貌特征识别软件处理,得到沥青试件光条所在位置的表面轮廓线上所有点的三维世界坐标;重复上述步骤直至自动载物台运动步数的上限值;将多个条纹坐标信息并行排列得到一系列的三维坐标点,经Delaunay三角剖分算法拟合,实现沥青路面微观纹理的三维重构。
1.2 三维成像原理
显微视觉三维成像如图2所示。测量平台置于世界坐标系原点O,建立坐标系O-XYZ;以CCD摄像机投影中心Oc为原点、光轴所在直线为OcZc,建立摄像机直角坐标系 Oc-XcYcZc;以CCD摄像机光轴与CCD器件成像平面的交点为原点o1,建立图像平面坐标系o1vu。激光器所投射的光条平面为OLST,P(X,Y,Z)为光切面与沥青路面相交轮廓线上任意一物点,其在图像平面上对应的像点为M(v,u)。

图2 显微视觉三维成像示意图Fig.2 Schematic diagram of 3Dimaging based on microvision
根据小孔成像原理,即必须满足像点、光心、物点的三点共线,同时对激光器发出的结构光三维空间位置进行描述,得到基于显微视觉的沥青路面三维成像数学模型如下[8]。
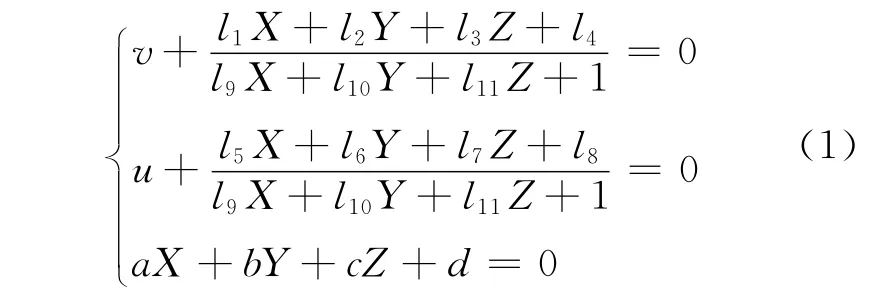
式中:li(i=1,2,…,11)为相机内方位元素的函数,是测量系统的待标定系数,可通过直接线性变换法(DLT)标定得到[9];a、b、c、d 均为线激光平面参数,可通过双重交比不变原理标定激光发射器得到[10]。
基于显微视觉图像处理技术,由式(1)便可得到任意一像点(v,u)对应的物点空间坐标(X,Y,Z),进而实现对激光条纹上对应点的测量,其空间坐标即包含了纹理表面的深度信息,最后通过Delaunay三角剖分算法将这些坐标点以三维方式真实呈现出来,实现微观纹理的三维重构。
2 显微图像的三维重构
沥青路面微观纹理显微图像的三维重构分为2个步骤:①图像预处理,进行图像阈值分割,提取激光结构面光条中心线;②三维图像的恢复,采用Delaunay三角剖分算法,通过MATLAB软件编程实现三维重构。
2.1 图像预处理
在结构光的测量中,由于激光器产生的光条投射到物体表面后宽度发生一定的变化,使得在某些区域出现数据丢失现象,从而影响最后对光条深度信息的提取。因此,本文采用双线性插值法对原始图像进行插值处理,结果如图3所示。
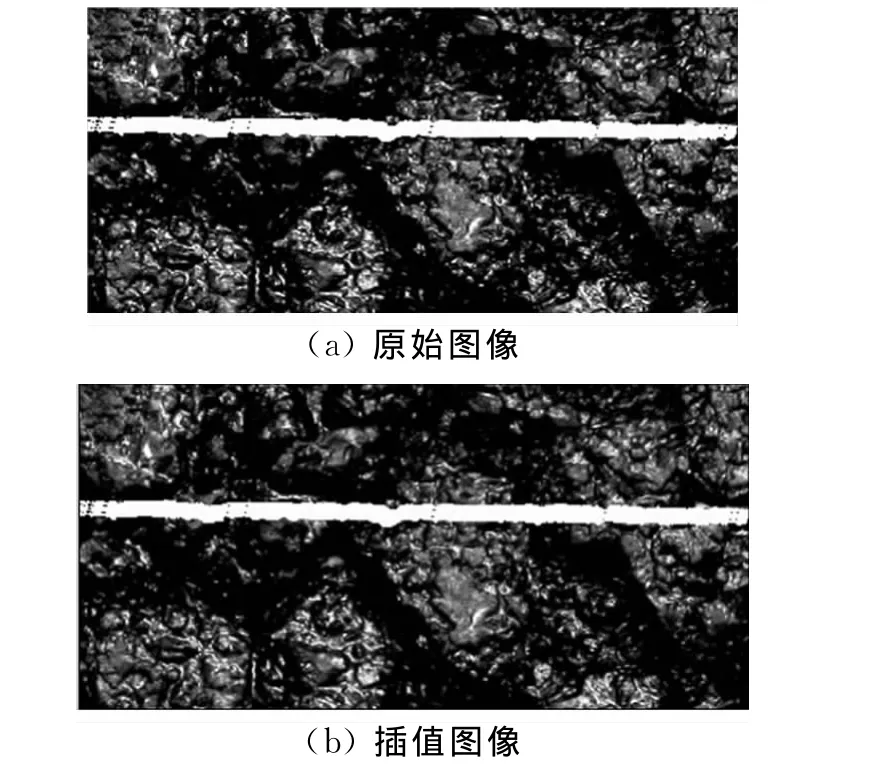
图3 图像插值处理Fig.3 Image Interpolation
此外,由于受到环境光的干扰及仪器设备的影响,图像中会存在各种噪声。要准确提取图像中线激光的深度信息从而得到具有较高精度的测量结果,必须对图像进行滤波处理以去除噪声干扰,本文采用中值滤波。中值滤波是一种典型的基于排序统计理论的非线性滤波技术,它在一定条件下可以克服线性滤波器带来的图像细节模糊问题,因此在有效降噪的同时还能较好地保护目标图像的边缘。图像滤波处理结果见图4。

图4 图像滤波处理Fig.4 Image filtering
在某些情况下,图像滤波除噪会使图像变得模糊,因而要对滤波图像进行锐化处理,本文采用拉普拉斯锐化方法[11]。图5为锐化处理后的图像。

图5 锐化处理后的图像Fig.5 Image after sharpening
2.2 图像分割
图像分割是把图像划分成各具特性的区域并能在其中提取出目标区域的技术过程。在沥青路面微观纹理显微图像中,需要获取的是光条信号,除此之外的其他信号为背景信号,这就要通过图像分割将光条信号从背景信号中分离开来。本文采用的是结构光图像,因而获取的图片背景具有单一性,在图像分割中可采用全局阈值分割方法[12]。图6为分割后的图像。

图6 阈值分割后的图像Fig.6 Image after threshold segmentation
2.3 光条中心线的提取
激光器发射出的结构光一般是束状,它是一种较为特殊的高斯光束,而不是单纯的均匀平面或球面光波[13]。因此,图像经过预处理和分割后,虽有部分失真但更有利于将光条信号从背景图像中提取出来,且并不影响光条信号深度信息的提取。由于得到的光条较粗,且边缘扩散,光条的精确坐标不能确定,这就需要提取光条中心线。
传统的中心线提取法有极值法、阈值法、灰度重心法等,这些提取方法的算法简单、速度快,但是精度很低,而且无法排除噪声的影响[14]。因此,本文采用二次抛物线拟合法[15],将光强峰值处作为结构光的中心,从而获取具有亚像素级精度的光条中心点坐标。光条中心线提取结果如图7所示。图8为光条中心线部分长度(长度为200个像素)的坐标值。

图7 光条中心线提取结果Fig.7 Result of extracting light strip centerline
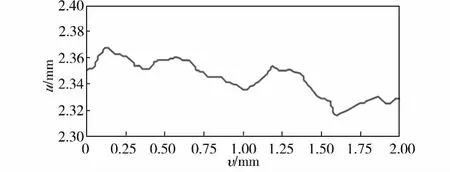
图8 光条中心点坐标值Fig.8 Coordinate values of light strip centerline
2.4 表面三维重构
经过图像处理和光条中心线提取获得的是一系列散乱且拓扑关系不确定的三维空间点,为了将沥青路面的表面形貌真实逼真地呈现出来,还需要进行表面三维重构,本文选用Delaunay三角剖分算法,通过MATLAB软件编程来实现。
Delaunay三角剖分算法大致分为三类:分治算法、增量算法(逐点插入法)和生长算法[16]。本文选用增量算法,增量算法的基本原理是将点数据逐一加入到已经形成的剖分面中,然后再更新整个剖面。
在每一光条中心线上取长度为200像素的一部分,沿y轴方向重复叠加500根光条,得到空间坐标点云,再对点云进行Delaunay三角剖分,最后得到沥青路面微观纹理三维重构图像,图9为其中的局部放大图像。

图9 Delaunay三角剖分结果Fig.9 Result of Delaunay triangulation
3 试验分析
为验证本文提出的基于显微视觉的沥青路面微观纹理三维重构方法的可行性和精度,将其与基于聚焦深度的沥青路面微观纹理三维重构方法[17]进行对比分析。由文献[17]可知,聚焦深度重构法的测量精度达到0.1μm,是一种高精度的沥青路面微观形貌检测方法,可作为试验对比依据。
对沥青试件采用上述两种方法进行表面纹理重构,选取重构区某一断面的二维坐标(X,Z),得到的试件二维断面轮廓如图10所示。由图10可见,两种方法获得的沥青表面二维断面轮廓图像波形接近,波形走向大致相同。在图10(a)和图10(b)中各取201个点的坐标值进行比较分析,部分数据如表1所示。

图10 两种重构方法获得的二维断面轮廓Fig.10 2Dcross section contours obtained by two reconstruction methods

表1 两种重构方法获得的断面轮廓坐标值Table1 Coordinates of cross section contours obtained by two reconstruction methods
按下式来评定两种方法的误差:

式中:N为坐标点总数。
经过计算得到误差E=0.0782mm。由此可知,基于显微视觉的沥青路面微观纹理三维重构方法是可行。通过试验检验,该系统的测量精度达到了0.017mm,可满足路面抗滑性、路面材料性能及路面养护等相关研究的要求。基于聚焦深度的沥青路面微观纹理三维重构法的测量精度虽然很高,但需在光照均匀的区域才有较好的显示效果,且操作繁琐;而基于显微视觉的沥青路面微观纹理三维重构法是利用激光器发出的光条与沥青试件表面相交形成三维图像,对光照均匀性无特殊要求,具有精度较高、操作简便、三维直观性强等特点。
4 结语
由于沥青路面具有纹理放射自相似性和微尺度特点,本文利用激光三角法测量原理,融合显微视觉的局部放大特性,提出了一种基于显微视觉的沥青路面微观纹理三维重构方法。该方法精度高、操作简便、三维直观性强,对光照均匀性无特殊要求。在实际使用中,由于摄像机透镜总会存在瑕疵,与理想成像光路相比,实际成像会发生一定的径向畸变,造成测量误差。因此,如何将摄像机畸变对分析结果的影响考虑进去以达到更高的测量精度,这还有待于进一步研究。
[1]Do M-T,Tang Z,Kane M,et al.Evolution of road-surface skid-resistance and texture due to polishing[J].Wear,2009,266(5/6):574-577.
[2]Zahouani H,Vargiolu R,Do M-T.Characterization of microtexture related to wet road/tire friction[C]∥Proceedings of SURF 2000:Fourth International Symposium on Pavement Surface Characteristics on Roads and Airfields.Nantes,France:World Road Association-PIARC,2000:195-205.
[3]Alferdo Cigada,Federico Mancosu,Stefano Manzoni.Laser-triangulation device for in-line measurement of road texture at medium and high speed[J].Mechanical Systems and Signal Processing,2010,5(7):2225-2234.
[4]Sagi Filin,Abo Nizar,Katrin Kremeike,et al.Interpretation and generalization of 3Dlandscapes from LiDAR data[J].Cartography and Geographic Information Science,2007,34(3):231-243.
[5]Ergun M,Iyinam S,Iyinam A F.Prediction of road surface friction coefficient using only macroand microtexture measurements[J].Journal of Transportation Engineering,2005,131(4):311-319.
[6]王端宜,李维杰,张肖宁.用数字图像技术评价和测量沥青路表面构造深度[J].华南理工大学学报:自然科学版,2004,32(2):42-45.
[7]陈国明,谭忆秋,王哲人,等.集料表面纹理测量的试验设计[J].中国公路学报,2006,19(2):36-41.
[8]周兴林,蒋难得,肖旺新,等.基于激光视觉的沥青路面构造深度测量方法[J].中国公路学报,2014,27(3):11-16.
[9]周兴林,叶声华,郑义忠.大尺寸工件直线度视觉测量系统中摄像机标定的研究[J].宇航计测技术,2007,27(4):1-5.
[10]张健新,段发阶,叶声华.简便的高精度摄像机标定技术[J].仪器仪表学报,1999,20(2):193-196.
[11]张铮,薛桂香,顾泽苍.数字图像处理与机器视觉[M].北京:人民邮电出版社,2010:162-175.
[12]章毓晋.图像工程(上册):图像处理和分析[M].北京:清华大学出版社,1999:179-215.
[13]孙长库,叶声华.激光测量技术[M].天津:天津大学出版社,2001:12-14.
[14]霍龙,张爱军,刘伟军,等.基于线结构光的视觉3D测量中光刀中心提取方法研究[J].计算机应用与软件,2006,23(10):100-102.
[15]李瑜芳.彩色结构光条纹中心线提取方法研究[D].长春:吉林大学,2011.
[16]陈定造.空间散乱点集Delaunay三角剖分的算法优化及实现[D].广州:广东工业大学,2008.
[17]周兴林,张云,蒋难得,等.基于聚焦深度的沥青路面微观纹理三维图像重构方法研究[J].公路交通科技,2014,31(9):6-12.
猜你喜欢
现代制造技术与装备(2022年9期)2022-11-02 05:40:16
东华大学学报(自然科学版)(2021年4期)2021-09-15 02:54:12
激光与红外(2021年6期)2021-07-23 09:27:32
软件(2020年3期)2020-04-20 01:45:18
摄影之友(影像视觉)(2018年12期)2019-01-28 09:01:00
制造技术与机床(2017年5期)2018-01-19 02:48:59
Coco薇(2017年8期)2017-08-03 15:23:38
Coco薇(2015年5期)2016-03-29 23:22:15
诗选刊(2015年6期)2015-10-26 09:47:10
浙江人大(2014年8期)2014-03-20 16:21:15
