
齿轮倒角轮廓协同高精度测量方法的研究
2015-10-30 07:21许增朴蔡春明王永强周聪玲
制造业自动化 2015年11期
许增朴,张 驰,蔡春明,王永强,周聪玲
(天津科技大学 机械工程学院,天津 300222)
0 引言
利用单一图像传感器的机器视觉测量技术难以满足精密制造业中对测量方法的精度高、速度快、非接触等诸多要求。因此,研究结合多种不同传感器各自优点的两级甚至多级视觉协同精密测量方法十分重要。
协同视觉测量方法是根据传感器各自的特点选择多个不同的视觉传感器配合使用并按特定要求完成测量。若为两级视觉协同测量,则使用第一级视觉传感器完成大范围粗略测量或是测量定位,使用第二级传感器完成局部小范围精密测量。第二级视觉传感器可以是不同分辨力的图像传感器,也可以是高精度的激光位移传感器。本文以齿轮倒角轮廓测量为对象,采用面阵图像传感器结合标定算法完成第一级测量定位,使用二维高精度电动平台携带点视觉的激光位移传感器按规划路径完成对工件轮廓尺寸的协同高精度测量。
1 协同测量的基本原理及坐标关系
1.1 协同测量的基本原理
本文所研究的测量系统用于对齿轮倒角表面轮廓的测量,精度要求在1μ m。由于目前面阵CCD自身的特性,像素尺寸通常大于2.5μ m,难以满足测量精度要求。而亚像素算法又存在对图像的矩特征估计,且计算复杂、计算结果稳定性不高,不适于对工件的高精度测量。因此,本系统采用面阵图像传感器拍摄图像,通过标定算法完成第一级视觉粗测量,及定位到需要精确测量的局部区域,采用重复测量精度达0.1μm的激光位移传感器完成工件表面轮廓的第二级视觉高精度测量。具体实现方式如图1所示,摄像机拍摄图像,计算机完成图像处理和标定矩阵的计算,然后发出指令给XY电动平台携带激光位移传感器按要求的路径完成测量,并输出打印测量报告。
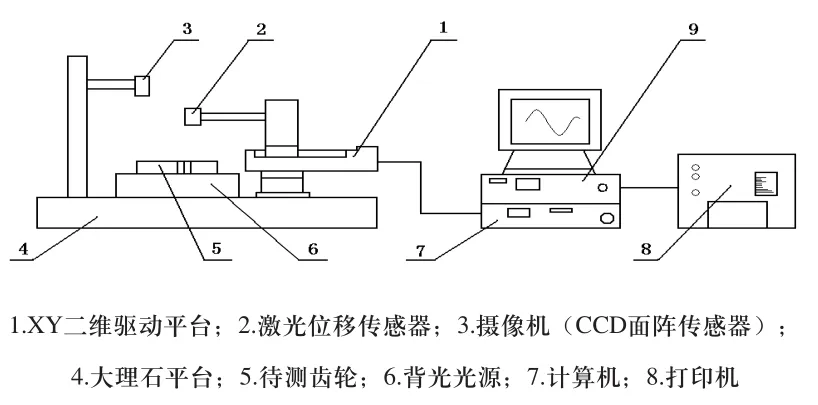
图1 系统测量原理
1.2 坐标转换关系
系统在测量工程中,使用图像经过标定引导XY驱动平台按测量路径运动,因此需要把测量过程中涉及到的几个坐标系统一在世界坐标系下。本系统包括世界坐标系XwYwZw、二维驱动平台坐标系XYZ、图像传感器坐标系XiYiZi和图像像素坐标系UV,对应序号依次为A、B、C、D,如图2所示。
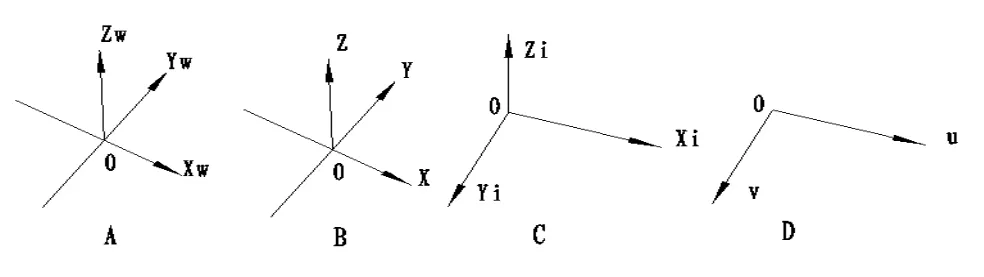
图2 系统中的四个坐标系
为方便计算,系统的世界坐标系XwYwZw的建立应与二维电动平台的坐标系XYZ重合。图像传感器坐标系的Zi轴即为摄像机光轴,与图像平面垂直,其余两轴Xi和Yi分别与图像的像素坐标系UV的U轴和V轴平行。图像像素坐标系(像平面坐标系)是一个平面坐标系,其坐标用离散的像素位置U和V表示。本系统将待测物放在二维平台坐标系的XOY平面(物平面)上,XOY平面和UOV平面之间的坐标关系可由相应的标定算法确定。
1.3 图像传感器的标定方法
利用图像传感器拍摄图像,根据物体在像平面上的像素位置关系确定物体在物平面上的实际位置,则应解决像平面与物平面之间的坐标映射关系(本系统中指UOV平面与XOY平面),这就涉及到标定问题。在单目视觉标定中,物平面中任意一点的齐次坐标(x, y)与像平面中的像素坐标(u, v)之间的关系可有一个3×3的矩阵确定[1]。
其中w为系数,m33=1,展开后即得:

因此,只要求出式(1)标定矩阵中的8个待定系数,即可根据式(2)求得像平面上任意像素点所对应的物平面上点的实际坐标。通过印有矩形方块的标定板可以求得物平面上矩形4个角点的真实坐标,再通过在图像上搜索矩形方块的4个角点,即可求得对应的像平面坐标。将物平面上4个点的坐标及其在像平面上对应4个点的坐标通过式(1)即可求得标定矩阵中的8个待定系数。下一步即可通过像平面上的坐标引导激光位移传感器完成测量。
2 齿轮倒角的协同测量
2.1 齿轮倒角一级测量的圆心定位计算
2.1.1 测量对象
本系统要测量的倒角齿轮的实物图和局部放大图如图3所示:左图中的放射直线是每个齿的齿顶圆圆弧中点与齿轮圆心的连线,右图中单个轮齿上的3条白色折线所在的截面与左图中对应轮齿的放射线垂直,激光位移传感器沿白色折线完成测量。
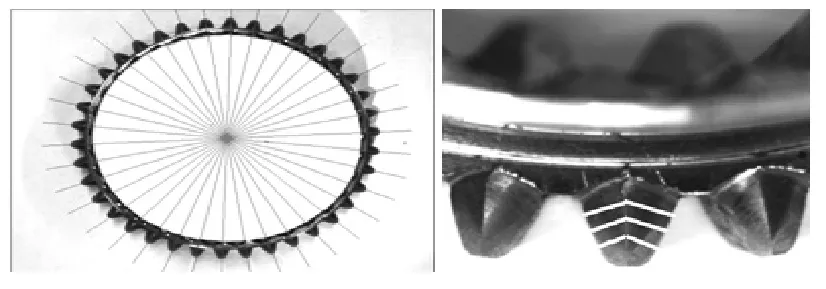
图3 倒角齿轮实物图和局部放大图
2.1.2 齿轮圆心定位方法
系统中的摄像机使用LED背光光源的透射光成像,因此可以得到边缘轮廓清晰的灰度图像,如图6中左图所示,利用VC++6.0软件编写程序对其进行图像处理,使用边缘检测算法提取齿轮图像的外圈边缘在图像像素坐标系UV下位置点的坐标集合。该集合根据边缘点的不同位置可分为三个子集合,包括齿轮齿顶圆上的点的集合、齿根圆上的点的集合和齿廓上的点的集合。将齿根圆上的点的集合从中提取出来,再通过最小二乘圆拟合算法即可求得齿轮圆心的坐标。经提取后,图像上齿根圆上所有点组成的集合记为D,其中任意一点Di(ui, vi)距圆心的距离为Ri,以Ri为半径的圆面积为si,拟合圆心坐标为(x0, y0)标准圆半径为R,面积为s,两圆的面积误差为:

误差的平方和函数为:

根据最小二乘原理,求取使F (x0, y0, R)最小时x0、y0和R的值,即对F(x0, y0, R)求偏导,且使之为零,即:
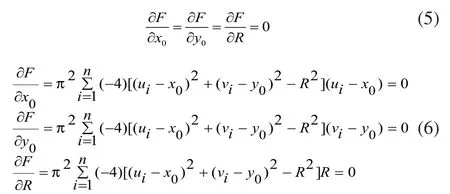
求解式(6)可得:
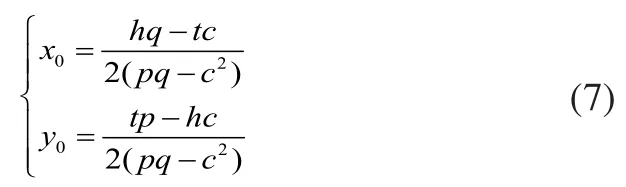
其中:

通过式(7)可求出齿轮精确圆心坐标O (Ou, Ov)。
2.2 齿轮倒角的测量
2.2.1 测量的主要参数
齿轮倒角的主要测量参数包括:成型截面的夹角,如图4中M所示;成型面交线到指定面的距离,如图4中
N所示。

图4 测量截面参数图

图5 单齿测量定位图
2.2.2 测量要求
图5中给出了倒角齿轮的一个轮齿待测量的三个截面位置,其中43.7、45.1等表示待测截面到齿轮圆心(中心)的距离,具体的数值应根据齿轮直径的大小设定。齿轮圆心为O点,被测齿的齿顶圆圆弧的中点为P点,则测量截面必须与直线OP垂直。根据测量截面到齿轮圆心距离的要求以及测量截面与直线OP的垂直的要求,决定了齿轮圆心定位的重要性。图4为测量截面中的一个,角度M和距离N即为待测参数。
2.3 测量路径规划
测量路径规划原理图如图7所示。
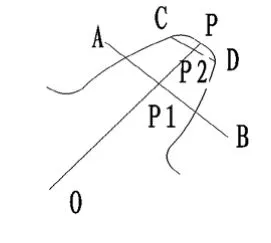
图6 测量路径原理图

图7 图像空间坐标系
图6中直线AB为测量数据时激光器走过的路径,P为被测齿的齿顶圆圆弧的中点,由前文关于测量要求的论述可知,AB与OP垂直,且OP1之间的距离L为已知。由于O点在图像像素坐标系UV中的坐标可由式(7)求出,因此,只要求出图像像素坐标系下的P点坐标(Pu,Pv)即可确定直线OP。直线CD为对应齿顶圆圆弧的弦,P2为直线CD的中点。
系统测量时,用户可通过鼠标点击选择齿轮图像上的任意一个齿,系统便可自动完成对该齿测量。Windows程序是基于消息机制的,用户点击轮齿时,程序便会感应到点击消息并记录该点。假设将该点记为Q3,其在图像像素坐标系UV下的坐标为(Q3u, Q3v)。此时,即可通过程序在图像上搜索点Q3附近的一个较小邻域,得到图像的局部边缘点的集合,此集合中包括齿顶圆圆弧CPD上的所有点,然后将圆弧CPD上的第一点C和最后一点D提取出来。求直线CD中点P2坐标(P2u, P2v),由于P、P2、O三点共线,即可求出直线OP的方程。
将图像像素坐标系下的点O和点P2通过式(2)转换到二维平台坐标系的XOY平面上,求得坐标分别为(Ox, Oy)和(P2x, P2y)。直线OP2的斜率为k, OP1长度已知为L,可利用极坐标求得点P1在XOY平面上的坐标(P1x,P1y)。在如图10所示坐标系中,可推导如下公式:

直线AB与OP1垂直,且AB为测量长度,此长度根据齿宽人为设定,即为已知L1,则点A坐标(Ax, Ay)为:

类似的,可求出B点坐标(Bx, By)。
2.4 利用激光位移传感器完成第二级精密测量
系统中采用点视觉的激光位移传感器完成第二级局部精密测量,测得的数据即为轮廓的高度信息Z坐标,配合高精度的XY电动平台的X、Y两维坐标信息,即可完成对表面轮廓的三维尺寸测量。
1)系统运动方式:系统按测量路径运动是依靠XY二维平台完成的。计算机发指令给二维平台控制步进电机带动高精度滚珠丝杠完成平台运动。平台的运动精度为1μ m,通过不停的发送不同方向的脉冲给步进电机即可携带激光器在XY平面内完成不同的运动。
2)测量方法:使用式(9)求出点A和点B在二维平台坐标系的XOY平面上的坐标后,便可由计算机发出指令驱动XY二维电动平台携带激光器按测量路径运动,以完成测量。
2.5 测量数据输出
激光位移传感器可通过激光三角测距法测量物体表面轮廓的高度信息,即z坐标。同时XY平台以1微米的精度在XY二维方向上运动,可提供XY二维坐标信息。将上述XYZ三维信息配合在一起,即可测量物体的三维轮廓尺寸。如果使所有截面的Y坐标都为0,则可将齿轮倒角轮廓绘制在一个平面(XOZ)中,一个轮齿三个截面的测绘结果如图8所示。在三维空间中,通过将XOZ平面配合不同的Y坐标即可形成轮齿倒角的三维轮廓,结果如图9所示。
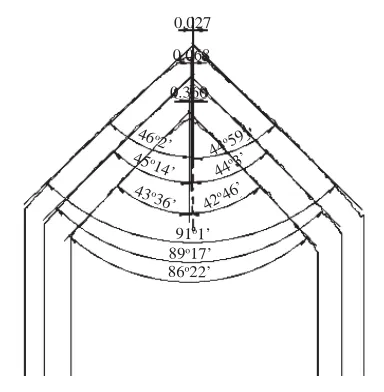
图8 齿轮倒角轮廓测绘结果
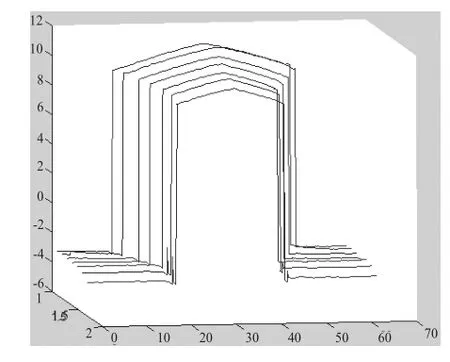
图9 轮齿倒角三维表面轮廓
3 结论
本文提出了一种的结合两种不同视觉传感器各自优点的协同视觉高精度测量方法。满足精密制造业中关于测量的速度快、精度高、非接触等测量要求,并将此方法成功应用于倒角齿轮轮廓测量系统,对齿轮倒角轮廓高度测量的精度达1μ m。本系统无需机械卡具定位且可以测量齿轮中的任意轮齿倒角的轮廓,降低了生产成本,提高了测量效率和测量精度。
[1] 许增朴,于德敏.光—象平面自动标定方法的研究[J].天津轻工业学院学报,1993,S1:14-21.
[2] 李自芹,董小雷,李庆利,郭彩玲.小模数齿轮视觉测量系统研究[J].沿海企业与技,2010,(5).
[3] XU Z P, ZH SH. Gear Chamfering Profile Measurement System Based On Laser And Machine Vision[C].AMR,[EI] 2011:888-893.
[4] 张新华.齿轮倒角轮廓激光测量系统研究[D].天津:天津科技大学,2010.03.
猜你喜欢
防爆电机(2022年2期)2022-04-26
装备制造技术(2020年1期)2020-12-25
汽车维修与保养(2020年11期)2020-06-09
制造技术与机床(2019年11期)2019-12-04
智富时代(2019年2期)2019-04-18
智富时代(2019年2期)2019-04-18
智富时代(2018年5期)2018-07-18
智富时代(2018年5期)2018-07-18
中国惯性技术学报(2017年1期)2017-06-09
中国交通信息化(2017年4期)2017-06-06
