基于CMOS摄像头的循迹智能车系统设计
2015-10-29 15:42郝铭轩
科学家 2015年9期
关键词:路径规划
郝铭轩
摘 要 本文介绍了一种基于面阵CMOS摄像头传感器的循迹智能车的软硬件结构和开发流程。通过MT9V022摄像头获取环境信息进行循迹,对采集的原始图像进行梯形校正和桶形校正,处理图像后获取赛道边界,利用人工势场法规划路径,在转向控制上利用位置式PID,速度控制上采用串级PID控制。使系统的稳定性和鲁棒性得到了很大的改善。最终实现智能车快速平稳运行。
关键词 CMOS摄像头;图像校正;路径规划;智能车
中图分类号 TP2 文献标识码 A 文章编号 2095-6363(2015)09-0030-02
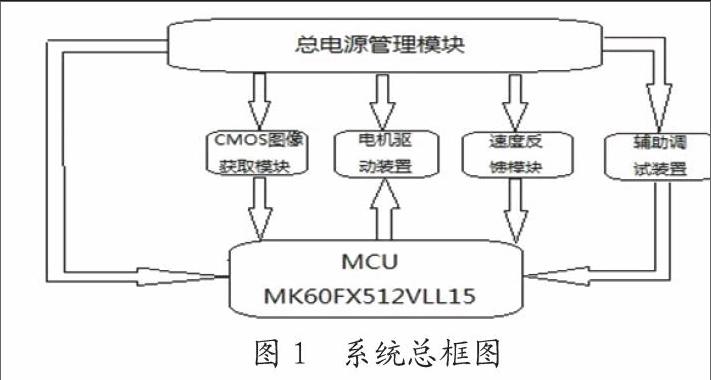
1 总体设计
系统结构如图1所示,该系统采用飞思卡尔MK60FX512VLL15作为控制芯片,利用DMA模块进行CMOS摄像头图像数据传输以提供微控器识别处理和规划决策,通过对图像处理和识别,驱动舵机电机,实现转向和速度控制,使用旋转编码器将当前测量速度值和测量加速度值反馈给微控器,使用速度串级控制,使智能车平稳运行。
2 硬件系统设计
1)供电模块。完整的智能控制车系统应包括转向、动力、检测采集和运算处理等模块。各个模块的电源均由7.2V镍镉电池提供,而工作电压各不相同。摄像头输入电压为3.3V,因其对电压噪声较敏感,因此使用了TPS7350和TPS7333两片低压差稳压芯片组成的两级稳压电路,并使用滤波电容,稳定输入输出电压。实际使用中,CMOS摄像头供电电压在供电电压波动时依旧稳定。
2)电机驱动模块。智能车电机的供电电压为电池电压,为提高电机灵敏性,充分发挥电机性能,使用4片IR2104半桥驱动控制MOS管构成H桥电路,控制两个RN260电机正反转。为控制智能车车体重量与体积,选用了具有体积小,导通电流大,导通内阻小等特点的LR7843型号MOS管。实验证明,智能车高速运行时,设计的驱动模块芯片温度依然处于正常范围。
3 软件系统设计
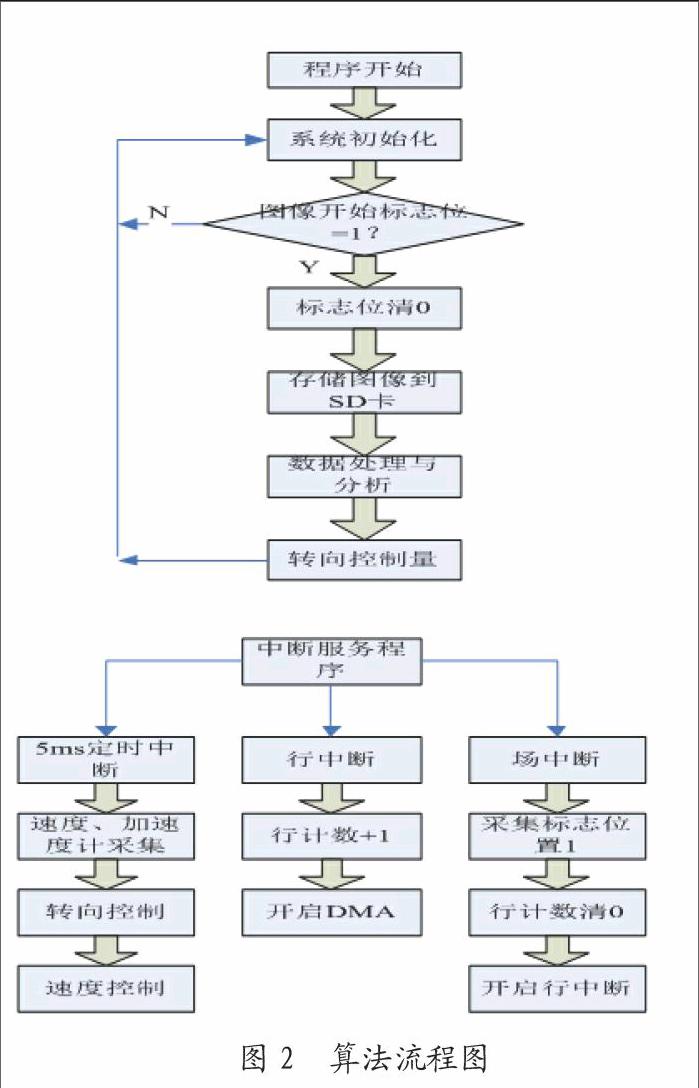
3.1 软件系统流程
如图2所示,软件控制包括摄像头图像采集、图像存储、图像处理、转向控制、速度控制等部分。
3.2 程序分配与中断处理
在程序分配上,为充分利用处理器空闲时间,使用DMA采集图像的同时,在主循环中进行图像存储。在软件设计中,将中断优先级分组和分配。配置最高优先级为场中断,次高级为行中断,最低优先级为5ms定时中断,使图像采集、转向控制、速度控制能够同时进行。
3.3 摄像头图像处理与识别
1)二值化。赛道是由白色PVC耐磨塑胶地板和黑边组成,在采集的图像中,黑色的灰度值低,白色的灰度值高。因此应根据图像黑白灰度值的差异,确定图像阈值,对图像进行二值化处理。
2)梯形校正。梯形校正采用不均匀行采集的方法校正图像的梯形畸变。利用摄像头采集一幅完整的图像,然后利用校正板计算出需要采集的行数。在图像的行中断到来时,只选择需要的行数进行采集。
3.4 路径规划
先获取赛道的边沿。从校正后的图像中部向两边搜黑白跳变点,从而确定左右边界的位置。搜到边界后,采用人工势场法进行路径规划,使智能车获得更好的
路径。
根据智能车在周围环境中的运动,设计成一种抽象的人造引力场中的运动,障碍物对智能车产生“斥力”,目标点对智能车产生“引力”,最后通过求合力来控制智能车的运动。在智能车的控制过程中,将图像远处的赛道中点视为目标点,把赛道边界视为障碍物,应用势场法规划出来的路径一般是比较平滑并且安全。利用此算法规划出的路径,可以使智能车在过S弯时直冲,快速过弯。
3.5 速度控制
在定时中断程序中通过SPI通讯协议读取当前旋转编码器的计数值,并进行计算得出车模当前速度。同时也通过AD模块读出安装在智能车上的加速度计的值。
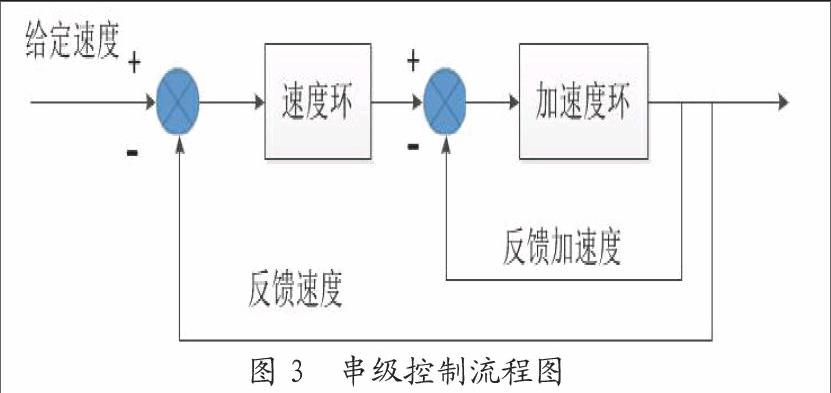
由于电机加速和减速过程存在较大的延时,所以单环PID控制存在滞后现象,无法达到对速度达到实时控制,因此采用动态响应更快的串级控制。图3为串级控制流程图。
在串级控制系统中,主、副调节器放大系数的乘积愈大,系统的抗扰动能力愈强,控制质量愈好。经过实践验证,采用串级控制后,车模的速度全程都比较稳定,直道加速快,弯道减速不明显。
3.6 转向控制
车模的转向控制是借助舵机实现的。前轮通过连杆与舵机相连,进而实现通过控制舵机的打角改变前轮的角度,让智能车转弯。计算车体与规划出的路径相对偏移量Error,采用比例和微分控制,可以得到输出量Steer Out。通过调节比例和微分系数两个系数能够有效控制车模的转向,把作为控制量输入到舵机从而改变智能车前轮角度,进而改变行驶方向。
参考文献
[1]吕俊哲.图像二值化算法研究及其实现[J].科技情报开发与经济,2004(12).
[2]王建,张晓炜,杨锦,等.基于视觉传感器的智能车摄像头标定技术研究(下)[J].电子产品世界,2010.
[3]刘久维,陈锋,邢岚.数字式CMOS摄像头在智能车中的应用[J].单片机与嵌入式系统应用,2010(7):42-44.
[4]师树恒,赵斌,郭朋彦,等.基于MK60N512的智能循迹小车设计[J].机床与液压,2014,42(2).