
圆柱正弦活齿传动扭转振动系统刚度研究
2015-10-29 02:13周思柱曾运运袁新梅
中国机械工程 2015年20期
周思柱 曾运运 袁新梅
长江大学,荆州,434000
圆柱正弦活齿传动扭转振动系统刚度研究
周思柱曾运运袁新梅
长江大学,荆州,434000
针对圆柱正弦活齿传动过程中的受力情况,基于弹性小变形和变形协调假设,提出了理论状态下啮合作用力分析模型;根据赫兹理论和啮合副的几何关系,建立了啮合副的啮合刚度模型,推导出接触点处主曲率和啮合副啮合刚度计算公式;依据能量不变原理建立了系统扭转振动模型,给出了等效扭转刚度计算公式,形成了一套完整的系统刚度矩阵计算分析方法;结合具体实例进行了分析,发现该扭转振动是一个时变系统且系统刚度矩阵呈现周期分布的特点,求出了周期计算公式,并提出了两种简化求解该扭转振动系统固有频率的方法。分析结果可作为圆柱正弦活齿传动机构的结构设计、振动分析的基础。
圆柱正弦活齿传动;啮合力;啮合刚度;等效扭转刚度;系统刚度矩阵
0 引言
圆柱正弦活齿传动是一种用来传递同轴间运动和动力的新型活齿传动机构,它具有结构紧凑、传动比大且范围广、承载能力强、传动效率高等优点,是一种很有发展前景的新型传动机构。目前对圆柱正弦活齿传动的研究主要集中在圆柱正弦活齿传动的啮合原理、传动比、运动学、滑动率、活齿受力、模糊故障树等方面[1-4],而关于圆柱正弦活齿传动的动力学方面的研究很少见报道,特别是啮合副啮合刚度、系统刚度矩阵方面的研究极少。
本文以圆柱正弦活齿传动系统为研究对象,建立了一套完整的圆柱正弦活齿传动扭转振动系统刚度矩阵计算分析方法,发现了该扭转振动系统时变性和周期性的特点,提出了两种振动系统固有频率简化求解方法。
1 活齿受力分析
圆柱正弦活齿传动由主动轴、壳体、活齿架及活齿4部分组成,如图1所示。壳体内圆柱表面上有周期数为Z3的内正弦滚道,主动轴外圆柱表面上有周期数为Z1的外正弦滚道,在内滚道、外滚道以及活齿架槽的交错区域安装有球形活齿。由于内外滚道均具有周期性,每个活齿与正弦滚道间共轭齿廓的工作过程又完全相同,因此在活齿受力分析时可以选取任意活齿为研究对象。

图1 圆柱正弦活齿传动结构图
为了便于分析并使问题简化,做如下假设[5]:①各构件无制造误差,整机无装配误差;②活齿与主动轴、活齿架及壳体啮合副之间为接触弹性小变形;③活齿的质量相对较小,忽略其惯性力;④不考虑啮合副各元素之间的摩擦力。
1.1活齿受力平衡方程
活齿局部坐标系为Oxyz,坐标原点O为活齿的球心,x轴表示活齿传动的径向方向,y轴表示活齿传动的周向方向,z轴表示活齿传动轴向方向。设活齿在运动时处于平衡状态,受力如图2所示,根据各个力的空间平衡关系有
(1)
式中,F1i为主动轴对活齿i的接触力;α1i为主动轴对活齿i的作用力接触角;μ1i为主动轴与活齿i啮合副接触线方向角;F2i为活齿架对活齿i的接触力;F3i为壳体对活齿i的接触力;α3i为壳体对活齿i的作用力接触角;μ3i为壳体与活齿i啮合副接触线方向角。

图2 活齿空间受力图
1.2变形协调方程和几何方程
主动轴与活齿i之间的接触力F1i可以分解为径向力F1xi和径向法截面方向的力F1yzi。假定主动轴瞬时不动,给活齿施加一个顺时针方向的力矩T,在该力矩的作用下,各活齿与主动轴接触处产生接触变形,使活齿中心转过一个角度Δφ,则所有活齿中心相应地发生一个相同的微小的周向位移Δs。根据主动轴正弦滚道与活齿的啮合方程可知,主动轴与活齿i啮合副接触线方向角为
μ1i=arctan(-R1/(AZ1cos(Z1φ1i)))
式中,φ1i为活齿i相对主动轴转角;R1为主动轴空间正弦曲线径向半径;A为内外正弦滚道幅值。
由变形协调条件,假设Δs在F1yzi方向的投影大小与F1yzi成正比例[3],即F1yzi∝Δscosμ1i,则有如下等式成立:
(2)
μ1max=arctan(R1/(AZ1))
对主动轴列扭矩平衡方程,则
(3)
式中,n为活齿个数;Tin为输入扭矩。
将式(2)代入式(3)可得
(4)
将式(4)代入式(2)可得
(5)
利用平均法可以求得

根据活齿i啮合副几何关系可知
(r1-r)(cosα1i-cosα3i)=R1-R3
(6)
式中,r为活齿半径;r1为正弦滚道半径;R3为壳体空间正弦曲线径向半径。
2 啮合副啮合刚度方程
研究分析圆柱正弦活齿传动的啮合刚度,先作如下假设[6-8]:①各零件的加工、装配准确,装配间隙为零,无间隙啮合;②啮合面上的摩擦力忽略不计;③主动轴、活齿、壳体、活齿架有变形,其变形量为微小数量级,可以忽略。
根据微分几何理论,设曲面上一个非脐点,其法曲率随切矢方向的改变而改变,在不同方向的法曲率中总存在最大值和最小值,这两个最值称为主曲率,其对应的方向称为主方向,并且两个主方向相互垂直[9]。根据主动轴滚道面与活齿i几何关系可知,在其接触点处四个主曲率分别为
(7)
式中,R为活齿中心旋转半径。
同理,可知活齿i与壳体滚道面在接触点处四个主曲率分别为
(8)
活齿与主动轴滚道面,或活齿与壳体滚道面和活齿与活齿架槽面弹性接触问题,均可看作为两个自由曲面体弹性接触问题[10]。由此可知,弹性压缩变形引起的相对位移量为
(9)
式中,F为两接触点法向压力;a为接触椭圆的长半径;J为椭圆积分;E1、E2及ν1、ν2分别为材料弹性模量和泊松比。
当两弹性体均是钢,弹性模量E1=E2=210 GPa、泊松比ν1=ν2=0.3时,式(9)可以简化为
(10)
其中,∑ρ为主曲率和,且∑ρ=ρ11+ρ12+ρ21+ρ22。
由啮合刚度的定义,对式(10)两边同时对δF求导,可得啮合刚度:

(11)
3 圆柱正弦活齿传动扭转振动
3.1扭转振动模型建立
根据圆柱正弦活齿传动的结构特点,作如下假设[11]:①因壳体与机架固联,不考虑其振动;②不计轴承支撑刚度、主动轴及活齿架的弯曲刚度;③不考虑摩擦和重力的影响。
将圆柱正弦活齿传动简化为主动轴、活齿、活齿架和壳体四个部分,按照集中参数法对主要运动构件作如下处理:
(1)主动轴等效为两个惯性圆盘M11、M12,且将主动轴转动惯量平均分配给两个惯性圆盘。
(2)活齿架等效为两个惯性圆盘M31、M32,且将活齿架转动惯量平均分配给两个惯性圆盘。
(3)所有活齿作为一个整体构件进行研究,该构件视为惯性盘圆M2。
(4)主动轴-活齿啮合副变形、活齿-活齿架啮合副变形、活齿-壳体啮合副变形分别视为扭转弹性体。
根据上述方法,可以将圆柱正弦活齿传动化简为一个串联传动系统,为了进一步化简系统,利用动能和势能不变原则,将各刚性圆盘和弹性轴转换到主动轴上,构成单一轴线的五自由度扭转振动模型,如图3所示。图3中,kin、cin为主动轴扭转刚度和扭转阻尼;k1e、c1e为主动轴与活齿啮合副总等效扭转刚度和总等效扭转阻尼;M2e为所有活齿总等效转动惯量;k2e、c2e为活齿与活齿架啮合副总等效扭转刚度和总等效扭转阻尼;M31e、M32e为活齿架等效转动惯量;k3e、c3e为活齿与壳体啮合副总等效扭转刚度和总等效扭转阻尼;kout、cout为活齿架扭转刚度和扭转阻尼;Tout为输出扭矩。

图3 圆柱正弦活齿传动扭转振动模型
3.2等效扭转刚度计算
根据扭转动力学模型得到扭转振动系统刚度矩阵K为
要建立主动轴上的当量盘-扭转弹簧的系统动力学模型,应求解各啮合刚度在输入轴上的总等效扭转刚度。由于各个单齿啮合副啮合刚度是转角的函数,不能简单地叠加,故先分别求解单齿啮合刚度的等效扭转刚度,然后求出所有啮合副的总等效扭转刚度。
3.2.1主动轴与活齿啮合副总等效扭转刚度
对于活齿与主动轴正弦滚道的啮合副来说,当主动轴转过角位移Δφ时,主动轴与活齿i接触点作用力的方向上产生的线位移为
xi=R0Δφsinα1icosμ1i
(12)
式中,R0为主动轴半径。
按照等效前后系统势能不变原则,利用下式可以求得全部活齿与主动轴总等效扭转刚度:
(13)
式中,k1i为主动轴与活齿i啮合刚度。
将式(12)代入式(13)可得

(14)
3.2.2活齿与壳体啮合副总等效扭转刚度
对于活齿与壳体正弦滚道的啮合副来说,当主动轴转过角位移Δφ时,活齿i与壳体接触点作用力的方向上产生的线位移为

(15)
式中,h为传动比。
按照等效前后系统势能不变原则,利用下式可以求得全部活齿与壳体总等效扭转刚度:
(16)
式中,k3i为活齿i与壳体啮合刚度。
将式(15)代入式(16)可得

(17)
3.2.3活齿与活齿架啮合副总等效扭转刚度
对于活齿与活齿架的啮合副来说,当主动轴转过角位移Δφ时,活齿i与活齿架接触点在作用力方向上产生的线位移为
(18)
按照等效前后系统势能不变原则,利用下式可以求得全部活齿与壳体总等效扭转刚度:
(19)
式中,k2i为活齿i与活齿架啮合刚度。
将式(18)代入式(19)可得
(20)
4 等效扭转刚度计算实例与分析
上述研究表明,系统中活齿与主动轴、活齿架、壳体的啮合刚度k1i、k2i、k3i是活齿啮合位置的函数,所以系统的刚度矩阵K也是活齿啮合位置的函数,因此圆柱正弦活齿传动扭转振动是一个5自由度的二阶变系数线性系统。


图4 啮合副啮合力变化曲线
将5个活齿啮合副啮合力分别代入式(11),就可求出各个活齿在不同位置时的啮合副刚度。篇幅限制,只绘制了1个活齿啮合副啮合刚度随主动轴转角变化曲线,如图5所示,图中,k1为主动轴与活齿之间啮合刚度,k2为活齿与活齿架之间啮合刚度;k3为活齿与壳体之间啮合刚度。

图5 啮合副啮合刚度变化
将各啮合副啮合刚度分别代入式(14)、式(17)、式(20),就可求出活齿在不同位置时的啮合副总等效扭转刚度。本文只列出了一部分数据和绘制了主动轴与活齿啮合副总等效扭转刚度变化曲线,如表1、图6所示。

表1 啮合副总等效扭转刚度

图6 主动轴与活齿啮合副总等效扭转刚度曲线
分析表1和图6可以发现,该实例啮合副等效扭转刚度k1e、k2e、k3e均呈现周期性,且周期相同,均为45°,这与理论分析结果一致。在一个周期内,啮合副等效扭转刚度变化范围很窄。现将k1e、k2e、k3e代入到扭转振动系统刚度矩阵K中,可以发现系统刚度矩阵也呈现周期性,周期TK=45°。
圆柱正弦活齿传动二阶时变扭转振动系统的刚度矩阵具有周期性,其周期TK=πh/(Z3n),即结构参数决定了周期大小,原因是圆柱正弦活齿传动结构具有周期性。分析发现,该扭转振动系统的质量矩阵M不变。扭转振动系统可认为是经典阻尼系统,则该扭转振动系统的阻尼矩阵C=αM+βK,其中,α、β是实常数。通过上述分析可知,阻尼矩阵C也呈现周期性,其周期TC与刚度矩阵周期TK相同。
对扭转振动系统固有频率进行分析可以避免系统共振,为该传动系统的动态响应分析以及动载荷的分析计算提供理论数据。质量矩阵M不变,刚度矩阵K和阻尼矩阵C具有相同的周期,所以系统的固有频率随活齿啮合位置的变化周期性地变化,且周期与刚度矩阵的周期TK相同。该结论与文献[13]分析的摆动活齿传动系统结论一致。
分别取k1e、k2e和k3e的最大值、最小值及平均值,可以计算出扭转振动系统最大固有频率fmax、最小固有频率fmin及平均固有频率fmea,计算结果如表2所示。
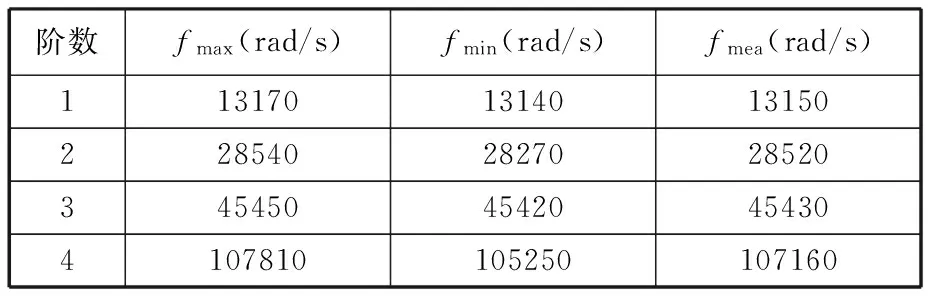
表2 扭转振动系统固有圆频率
综合上述结论,可以提出两种计算圆柱正弦活齿传动扭转振动固有频率的方法:
(1)二阶时变扭转振动系统固有频率可以转化到一个周期内通过矩阵迭代摄动法求解系统的固有频率,这将大幅度减小求解时变系统固有频率精确值的计算量。
(2)扭转振动系统刚度矩阵直接取平均值,则将圆柱正弦活齿二阶时变扭转振动系统转化为二阶常系数扭转振动系统,这样求出的系统扭转振动固有频率误差很小,通过这种方法更加简化了扭转固有频率的计算,而且也完全满足工程实际要求。
5 结论
本文建立了一套完整求解圆柱正弦活齿传动扭转振动模型啮合刚度的方法,并结合具体实例进行了分析说明,发现扭转振动系统刚度矩阵具有周期性,求出了周期计算公式,指出了扭转振动系统是一个时变系统,提出了该时变系统固有频率的两种简化求解方法,一种方法是在刚度矩阵周期内利用矩阵迭代摄动法求解系统在不同位置时的固有频率精确值,另一种方法是将扭转刚度矩阵看作定值,将扭转振动时变系统转化为常系数线性系统,求解平均固有频率,计算精度完全满足工程要求。
[1]Li Guixian,Sun Yu,Zhang Xin.Meshing Theoretical Study and Simulation on Cylindrical Tri-sine Oscillating Tooth Gear Drive[J].Journal of Donghua University,2004,21(1):117-120.
[2]李瑰贤,孙瑜,李笑,等. 新型微型减速器传动比及传动条件的研究[J]. 机械传动,2003,27(3):12-13.
Li Guixian,Sun Yu,Li Xiao,et al.Transmission Ratio and Transmission Condition of New Type Mini-reducer[J].Journal of Mechanical Transmission,22003,27(3):12-13.
[3]李瑰贤,孙瑜,李笑,等.圆柱正弦活齿传动受力分析研究[J].哈尔滨工业大学学报,2003,35(11):1381-1383.
Li Guixian,Sun Yu,Li Xiao,et al.Mechanics Model of Cylinder Sine Oscillating Tooth Gear Drive[J].Journal of Harbin Institute of Technology,2003,35(11):1381-1383.
[4]孙瑜,李瑰贤,魏海军.圆柱正弦活齿减速器模糊故障树分析[J].大连海事大学学报,2004,30(3):77-80.
Sun Yu,Li Guixian,Wei Haijun.Fuzzy Fault Tree Analysis of Cylinder Sine Oscillating Tooth Reducer[J]. Journal of Dalian Maritime University,2004,30(3):77-88.
[5]李剑锋,董新蕊.凸轮激波滚动活齿传动啮合力分析方法[J].机械工程学报,2008,44(5):39-44.
Li Jianfeng,Dong Xinrui.Method of Meshing Force Analysis for the Movable Rolling Teeth Transmission with Cam Actuating[J].Chinese Journal of Mechanical Engineering,2008,44(5):39-44.[6]邹英永,温建民,于广滨.径向力和弯矩联合作用下滚子轴承的刚度计算[J].中国机械工程,2006,17(15):1572-1575.
Zou Yingyong,Wen Jianmin,Yu Guangbin.Stiffness Calculation of Roller Bearing with Radial Force and Moment Loads[J].China Mechanical Engineering,2006,17(15):1572-1575.
[7]李伟建,潘存云,王荣吉. 空心圆柱滚子轴承刚度分析[J]. 中国机械工程,2009,20(7):795-798.
Li Weijian,Pan Cunyun,Wang Rongji.Stiffness Analysis of Hollow Cylindrical Roller Bearings[J].China Mechanical Engineering,2009,20(7):795-798.
[8]An Zijun,Gao Fei.Engagement Rigidity Analysis of Swing-Rod Movable Teeth Transmission[J].Machinery,2007,45(5):3-5.
[9]傅则绍.微分几何与齿轮啮合原理[M].山东:石油大学出版社,1999.
[10]程光仁,施祖康,张超鹏.滚珠螺旋传动设计基础[M].北京:机械工业出版社,1987.
[11]An Zijun,Gao Fei. Torsion Vibration Analysis and Modeling Research on Swing-Rod Movable Teeth Transmission[J]. Machine Design and Research,2007,23(3):79-81.
[12]邵忍平. 机械系统动力学[M].北京:机械工业出版社,2005.
[13]Liang Shangming,Zhang Junfu,Xu Liju,et al. Dynamic Model of Swing Movable Teeth Transmission System Vibration[J]. Journal of Vibration Engineering,2003,16(3):31-35.
(编辑苏卫国)
Study on Stiffness of Torsional Vibration System on Cylinder Sine Oscillation Tooth Transmission
Zhou SizhuZeng YunyunYuan Xinmei
Yangtze University,Jingzhou,Hubei,434000
In accordance with the force conditions of cylinder sine oscillation tooth transmission,a model of meshing force analysis under theoretical conditions was proposed based on the hypothesis of stretch small distortion and distortion congruity.According to Hertz theory and geometric relation of engagement pair,engagement stiffness models of the engagement pair were established,and the calculation formulas of the engagement stiffness and the principal curvature of the contact point were deduced.The torsional vibration model of cylinder sine oscillation tooth transmission were established by energy conservation principle,and the calculation formulas of equivalent torsional stiffness were given,forming a complete set of analysis and calculation methods of system stiffness matrix,and the presented methods was illustrated through an example.The fact is discovered,that the torsional vibration is a time-varying system and the system stiffness matrix shows the characteristics of cycle distribution,and the cycle calculation formula are found.Two simplified methods for solving natural frequency of the torsional vibration system were pointed out.The acquired results can be adopted as the analytical base for structure design and vibration analysis.
cylinder sine oscillation tooth transmission;meshing force;engagement stiffness;equivalent torsional stiffness;system stiffness matrix
2014-10-16
国家自然科学基金资助项目(51374041)
TH132.425DOI:10.3969/j.issn.1004-132X.2015.20.003
周思柱,男,1963年生。长江大学机械结构强度与振动研究所教授、博士研究生导师。主要研究方向为机械结构强度与振动。获省级科技进步一等奖1项、二等奖4项、三等奖2项,中国石油与化工科技进步奖4项,中国机械工业科学技术二等奖1项。发表论文150余篇。曾运运,男,1988年生。长江大学机械结构强度与振动研究所硕士研究生。袁新梅,女,1979年生。长江大学机械工程学院博士研究生。
猜你喜欢
物流技术与应用(2022年8期)2022-08-26
电子乐园·下旬刊(2022年5期)2022-05-13
新高考·高三数学(2022年3期)2022-04-28
物流技术与应用(2020年4期)2020-05-06
模具制造(2019年3期)2019-06-06
制造技术与机床(2019年4期)2019-04-04
中国自行车(2018年8期)2018-09-26
中学生数理化·高一版(2018年6期)2018-07-09
理科考试研究·高中(2017年7期)2017-11-04
制造技术与机床(2017年3期)2017-06-23
