液压型风力发电机组并网冲击抑制研究
2015-10-29 04:52闫桂山孔祥东陈立娟
中国机械工程 2015年15期
艾 超 闫桂山 孔祥东 陈立娟
1.燕山大学河北省重型机械流体动力传输与控制实验室,秦皇岛,0660042.先进锻压成形技术与科学教育部重点实验室(燕山大学),秦皇岛,066004
液压型风力发电机组并网冲击抑制研究
艾超1,2闫桂山1孔祥东1,2陈立娟1
1.燕山大学河北省重型机械流体动力传输与控制实验室,秦皇岛,0660042.先进锻压成形技术与科学教育部重点实验室(燕山大学),秦皇岛,066004
以液压型风力发电机组为研究对象,针对其并网冲击问题,建立了风力发电机数学模型、定量泵-变量马达液压调速系统数学模型、同步发电机与励磁系统数学模型,推导了并网过程的冲击电流与冲击转矩数学模型。以数学模型为基础,提出了液压型风力发电机组并网冲击抑制方法,即通过发电机稳速控制、励磁电压控制和准同期监控相结合对机组并网冲击进行抑制。以30 kV·A液压型风力发电机组实验台为仿真和实验基础,对机组并网冲击抑制展开研究。仿真和实验结果表明,所提出的并网冲击抑制方法对并网冲击转矩和冲击电流具有较好的控制效果,基本实现了机组柔性并网。
风力发电;液压传动;并网冲击;冲击抑制
0 引言
风能作为一种丰富可再生的绿色能源[1-3],是最具大规模开发应用前景的可再生能源之一。随着大容量风电机组的出现,并网冲击[4]成为一个迫切需要解决的问题。并网冲击严重时不仅导致电力系统电压的大幅度下降,并且可能对发电机和机械部件造成严重损坏。因此,风力发电机组并网冲击抑制是决定机组性能的关键技术之一,也是其顺利并网的一项基本要求。
国内外学者对风力发电机组并网冲击抑制展开了一系列研究。文献[5]针对双馈式风力发电机组,通过定子磁链定向和转子电流闭环的控制方法实现并网过程冲击电流抑制;文献[6]针对永磁直驱风力发电机组,通过柔性直流换流器控制实现机组的柔性并网和冲击抑制;文献[7]针对液压型风力发电机组,对准并网时机组冲击特性展开研究,并进行了仿真分析。
本文所述液压型风力发电机组由定量泵-变量马达液压调速系统组成,以配合励磁同步发电机。为保证机组可靠性与电能质量,与传统风力发电机组一样,需要抑制并网冲击。因此,本文针对液压型风力发电机组并网冲击展开研究,提出了一种并网冲击抑制方法,通过发电机稳速控制、励磁电压控制和准同期监控相结合对机组并网冲击进行抑制。
1 液压型风力发电机组简介
1.1工作原理简介
液压型风力发电机组[8-9]主要包括风力机、定量泵、变量马达、同步发电机等,其工作原理如图1所示。风力发电机同轴驱动定量泵,定量泵输出高压油经定量泵-变量马达液压调速系统驱动变量马达旋转,将液压能转化为机械能。最后,同步发电机在变量马达驱动下实现并网发电。机组工作过程中,通过实时调整变量马达摆角,实现液压调速系统传输特性的控制。
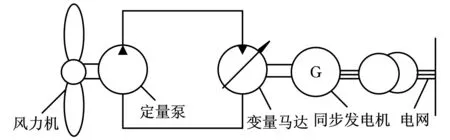
图1 液压型风力发电机组的工作原理
1.2机组准同期并网控制要求
液压型风力发电机组采用准同期并网法实现并网控制,即机组在实际并网过程中允许一定的偏差,机组并网时的准同期条件[10]为:①发电机频率与电网频率的最大允许误差为额定频率的±0.5%;②发电机电压与电网电压的最大允许误差为额定电压的±10%;③发电机同期合闸时同期点两侧电压相位差不大于5°,在断路器触头闭合瞬间应接近于零。
上述三条分别是机组实现准同期并网的频率、电压和相位要求。具体来讲,机组准同期并网要求发电机在与电网相位差为零的瞬间闭合合闸开关,即当脉动电压包络线在零点时,机组完成并网。在此条件下,整个风力发电机组可平滑柔性切入电网,减小冲击。
2 数学模型分析
2.1风力机数学模型
风力机驱动定量泵旋转,是整个系统的能量捕获机构,同时风力机的波动能量输入为并网冲击问题带来了一定的影响。风力机输出功率与转矩的数学模型分别为
(1)
(2)
式中,P为风力机输出功率;ω为风力机角速度;ρ为空气气流密度;R为叶片半径;v为风速;Tv为风力机输出转矩;CP(λ,β)为风能利用系数。
进一步,风力机动力学方程为
(3)
式中,Tp为定量泵负载转矩;J为风力机等效转动惯量。
2.2液压调速系统数学模型
液压型风力发电机组通过定量泵-变量马达闭式系统实现能量传输,其原理如图2所示。
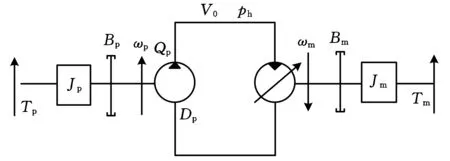
图2 定量泵-变量马达液压闭式系统原理
由数学模型分析可得,变量马达角速度数学模型[11]为
ωm=
(4)
式中,ph为系统压力,ph0为ph的初始值;γ为变量马达斜盘倾角与其最大倾角比值,γ0为γ的初始值;Km为变量马达排量梯度,Km0为Km初始值;ωm为变量马达角速度,ωm0为ωm的初始值;Ct为总泄漏系数;V0为单个腔室的总容积;qVp为定量泵额定流量;βe为有效体积弹性模量;Jm为变量马达和负载的总惯量;Tm为变量马达负载力矩;Bm为变量马达侧黏性阻尼系数。
2.3励磁同步发电机及励磁系统数学模型
2.3.1励磁同步发电机数学模型
同步发电机模型相对复杂,变量比较多,在实际工程实现时比较困难,所以,常用派克(Park)变换[12]对方程中的变量进行变换处理。
经派克变换后,同步发电机电压方程为
(5)
经派克变换后,同步发电机磁链方程为
(6)
式中,ud、uq、u0分别为机端电压在d轴、q轴和零轴的分量;uf为励磁电压;ψd为直轴磁链;ψq为交轴磁链;ψ0为零轴磁链;ψf为励磁绕组磁链;ψD为纵轴阻尼绕组磁链;ψQ为横轴阻尼绕组磁链;Xd、Xq、X0分别为直轴、交轴和零轴的同步电抗;Xad、Xaq分别为直轴和交轴反应电抗;XD、XQ分别纵轴、横轴阻尼绕组电抗;Xf为励磁绕组电抗;id、iq分别为负载电流在d轴和q轴的分量;ra、rb、rc为定子三相绕组电阻;rf为励磁绕组电阻;rD、rQ为纵轴、横轴阻尼绕组电阻;iD、iQ、i0分别为纵轴、横轴和零轴的阻尼绕组电流;if为励磁绕组电流。
2.3.2励磁系统数学模型
本文所研究的同步发电机采用无刷励磁系统[13],省去了滑环和电刷,主要组成部分有励磁调节器、交流励磁机、旋转整流器等,其结构原理如图3所示。

图3 励磁控制原理
同步发电机在工作过程中,由励磁系统对其工作状态进行控制,其控制框图见图4。图4中,UR为励磁调节器输出电压;U为发电机机端电压;Uref为给定励磁电压;KA为综合放大倍数;KR为电压比例系数;KE为自励系数;SE为饱和系数;TA为综合时间常数;TR为电压测量系统时间常数;TE为励磁时间常数;KG为发电机放大倍数;TG为发电机时间常数。

图4 同步发电机励磁系统传递函数框图
由图4传递函数框图可知,同步发电机机端电压输出传递函数为
(7)
2.4并网冲击特性数学模型
2.4.1冲击电流数学模型
并网合闸时须保证发电机机端电压与电网母线电压保持相等,否则在合闸瞬间会产生一定的冲击电流,冲击电流有效值为
(8)
式中,ΔU为发电机电动势与电网母线电压瞬态差值;X″d为发电机系统次暂态电抗。
2.4.2冲击转矩数学模型
并网合闸时,电磁转矩数学模型为
(9)
式中,E为电网母线电压;Xx为系统阻抗;δ为发电机机端电压U超前母线电压E的相角;t为时间。
3 并网冲击抑制方法研究
以上述数学模型为基础,为抑制液压型风力发电机组并网冲击,实现机组柔性并网,本文提出了一种并网冲击抑制方法,其控制框图见图5。
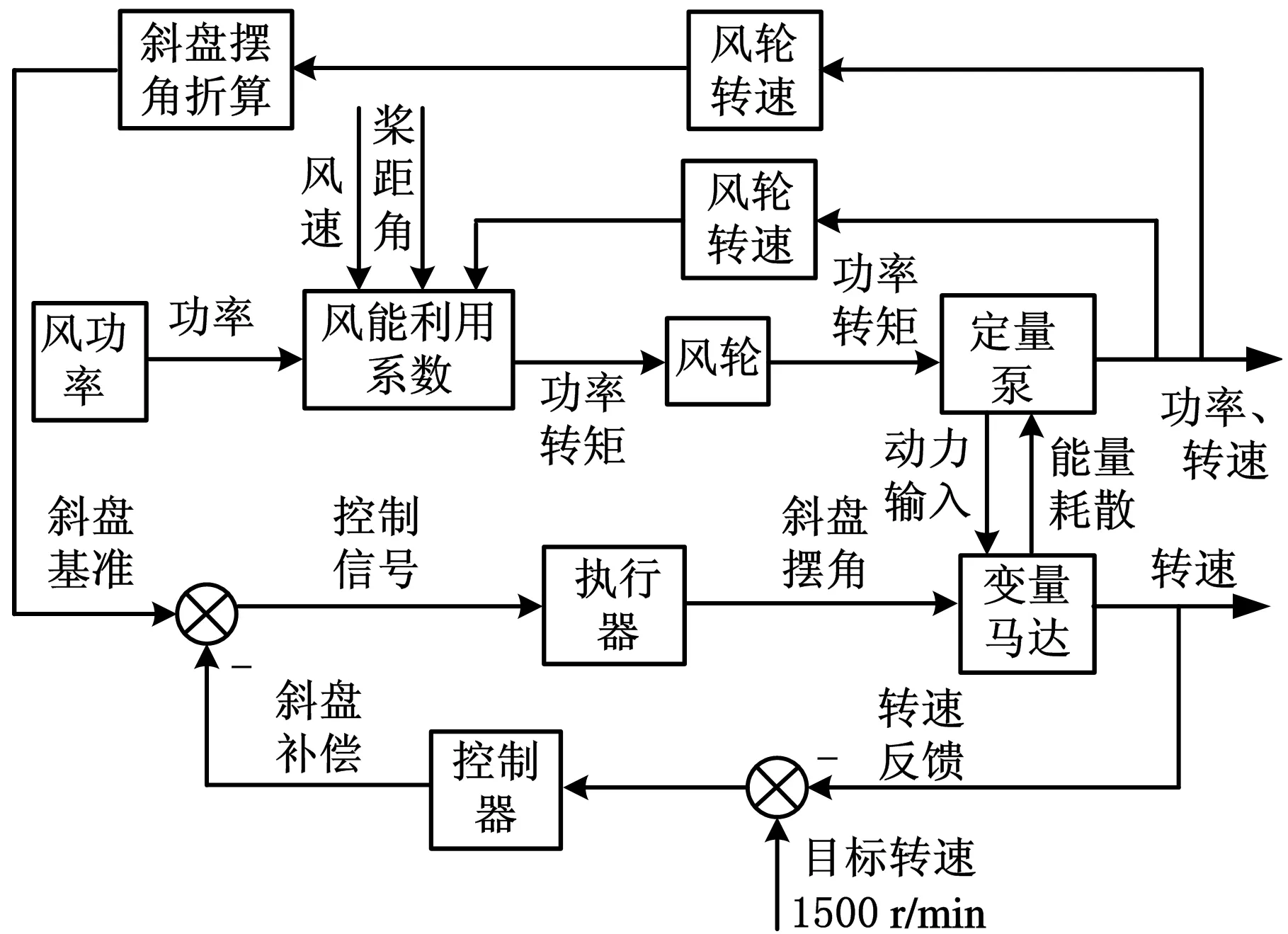
(a)发电机稳速控制框图
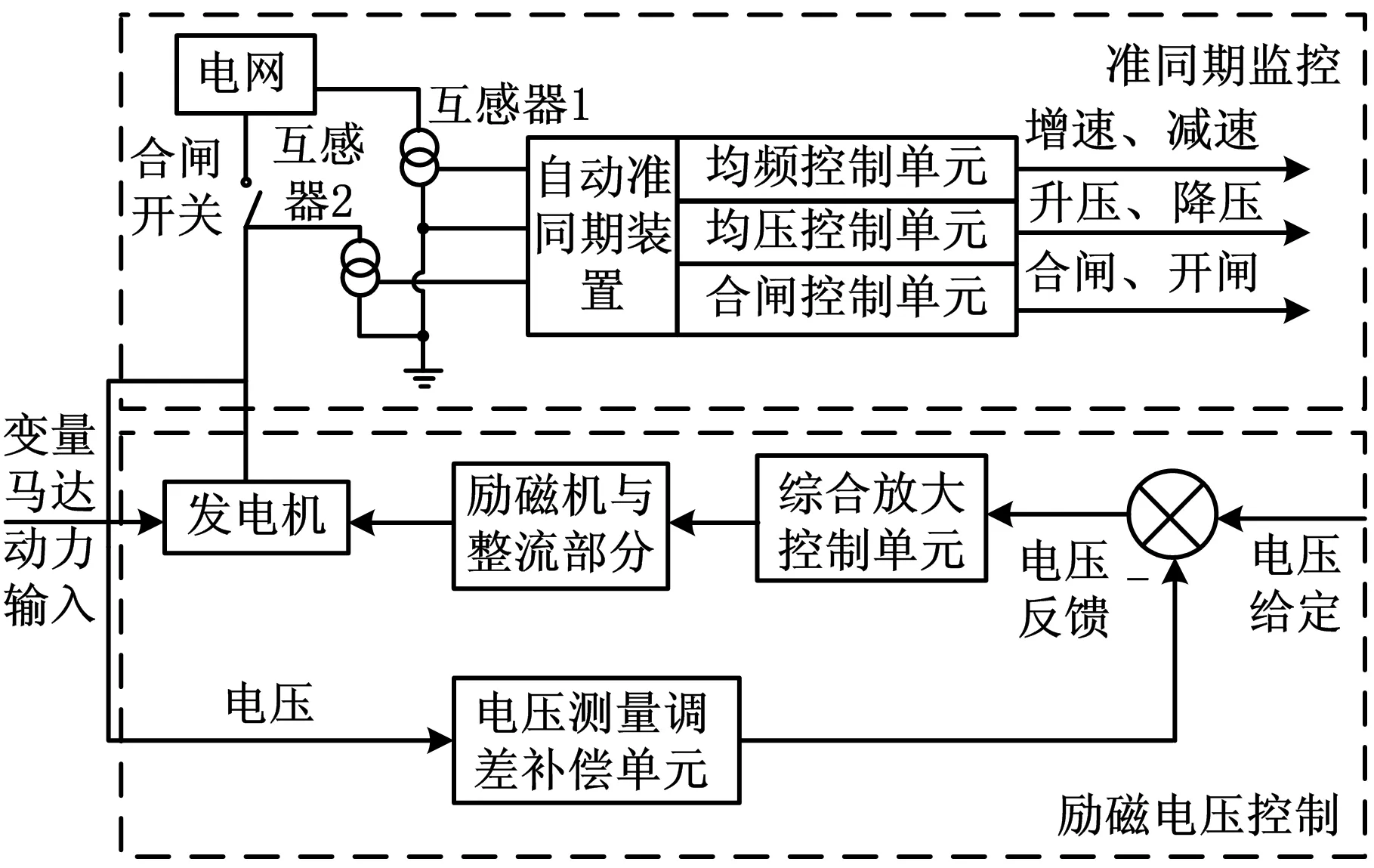
(b)励磁控制与准同期监控框图图5 并网冲击抑制控制框图
由图5可知,液压型风力发电机组并网冲击抑制主要包括三部分:发电机稳速控制、励磁电压控制和准同期监控。
机组在准同期并网过程中,首先利用发电机稳速控制[14],将风轮转速折算为变量马达摆角值,并通过变量马达输出转速反馈,实现发电机(变量马达)输出转速稳定于1500 r/min(±6 r/min);然后加入励磁电压控制,发电机在励磁作用下,其电压与电网电压逐步接近相等;最后,实施准同期监控,调整变量马达转速使发电机携带一定有功功率,在同期点两侧电压相位差为零瞬间合闸并网,使机组平滑柔性切入电网。
4 仿真与实验研究
依据液压型风力机组并网冲击抑制控制原理,以30 kV·A液压型风力发电机组实验台为基础,利用MATLAB/Simulink软件搭建系统仿真平台,仿真平台具体包括风速与风轮特性模块、主控与稳速控制模块、励磁同步与准同期监控模块等,其中发电机仿真模型采用Simulink软件Synchronous Machine模块,该模型考虑了发电机内部电压、磁链与电流等关键参量之间的数学模型关系,同时也可反映励磁系统对发电机的控制关系。仿真平台见图6,系统参数设定见表1。
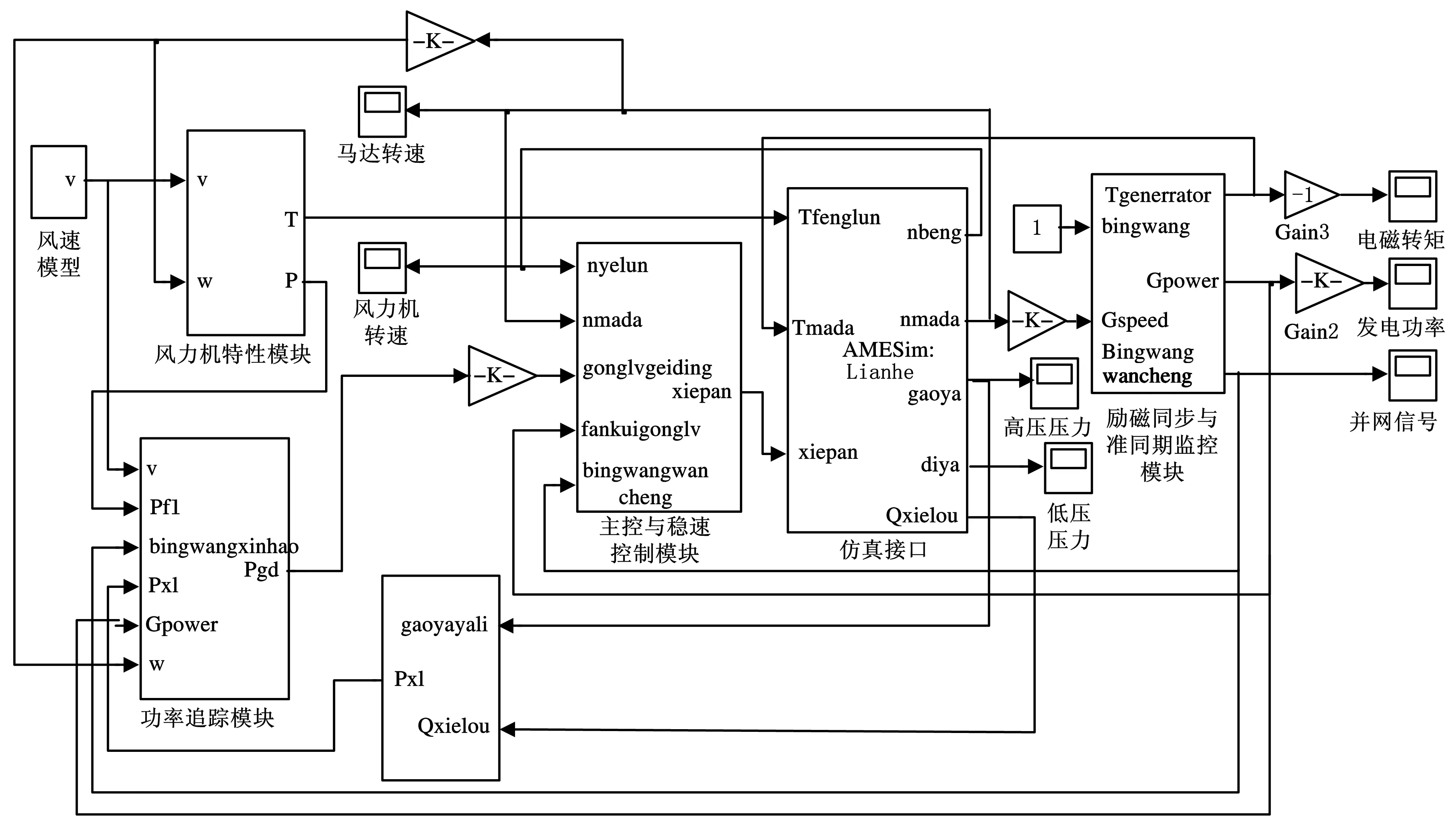
图6 并网冲击抑制控制仿真平台
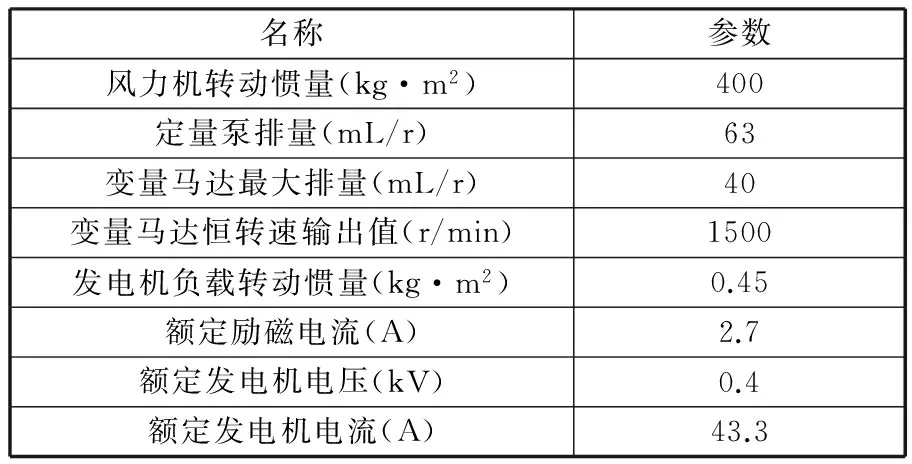
名称参数风力机转动惯量(kg·m2)400定量泵排量(mL/r)63变量马达最大排量(mL/r)40变量马达恒转速输出值(r/min)1500发电机负载转动惯量(kg·m2)0.45额定励磁电流(A)2.7额定发电机电压(kV)0.4额定发电机电流(A)43.3
实验过程中,通过变频器控制变频电机模拟风力机特性。采用相似模拟原理,并对转动惯量进行模拟补偿[15],可对风力机输出转矩、转速和转动惯量进行相似模拟。实验平台见图7。
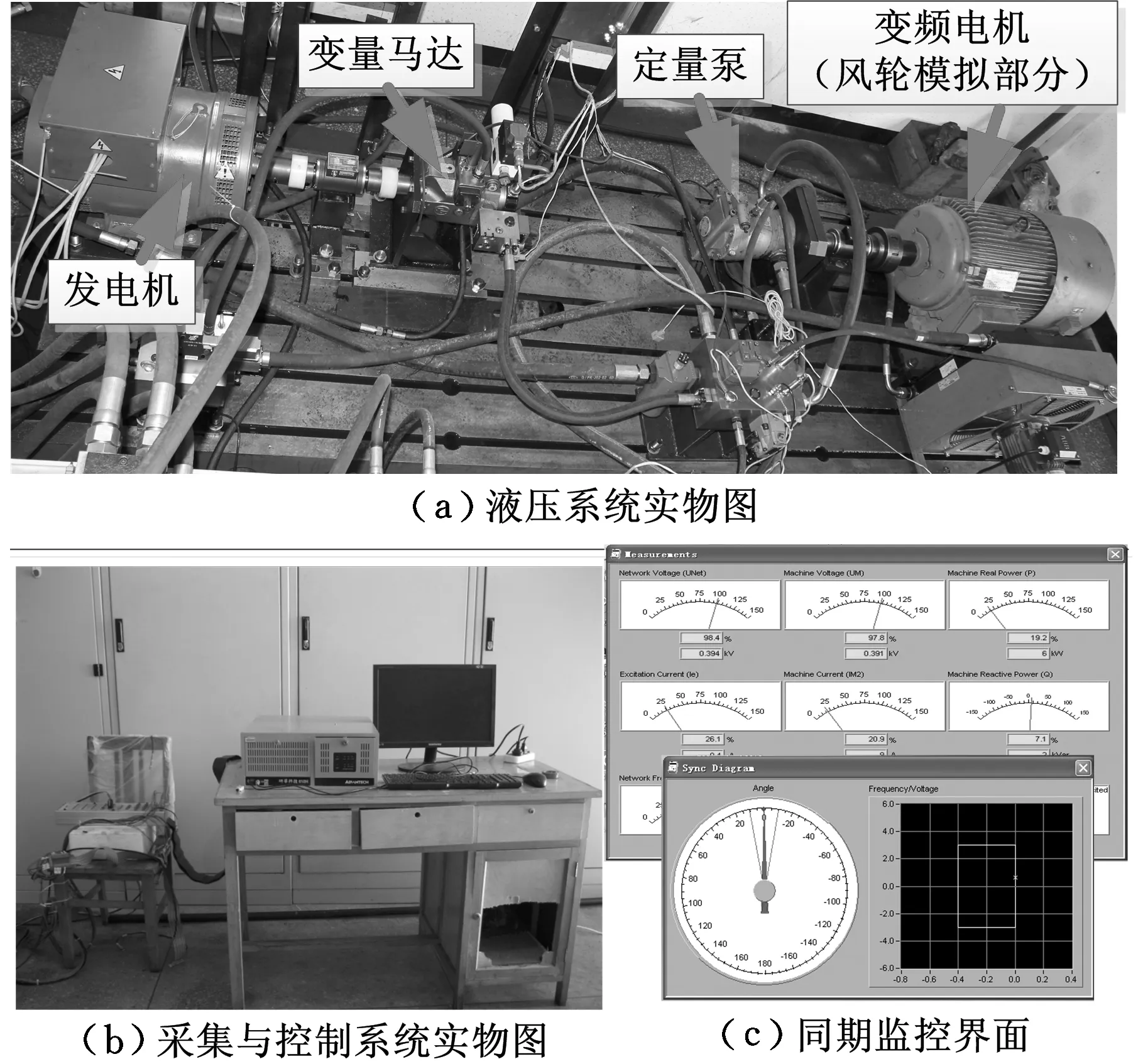
图7 并网冲击抑制实验平台
4.1风力机输出仿真与实验研究
考虑到风能本身的间歇性和不完全可控性,风力机输入液压系统的转矩和转速存在一定的波动,为并网冲击问题带来了一定的影响。
依托燕山大学30 kV·A液压型风力发电机组实验台,模拟波动风速下风力机输出特性,对其输出转矩和转速进行研究,得到仿真和实验结果如图8所示。

(a)风力机(定量泵)转速曲线

(b)风力机输出转矩曲线图8 风力机输出仿真与实验曲线
由图8仿真和实验结果可知,采用相似模拟原理,通过变频器控制变频电机对风力机特性进行模拟可以得到波动风速下风力机转速和输出转矩的特性曲线。风力机输出转矩和转速作为并网冲击过程的波动能量输入,是并网冲击抑制过程的重要因素。
4.2并网冲击仿真研究
依据所提出的并网冲击抑制方法,利用仿真平台进行研究。在第1 s时刻模拟合闸并网,采用所提出的并网冲击抑制方法进行并网仿真研究,结果如图9所示。
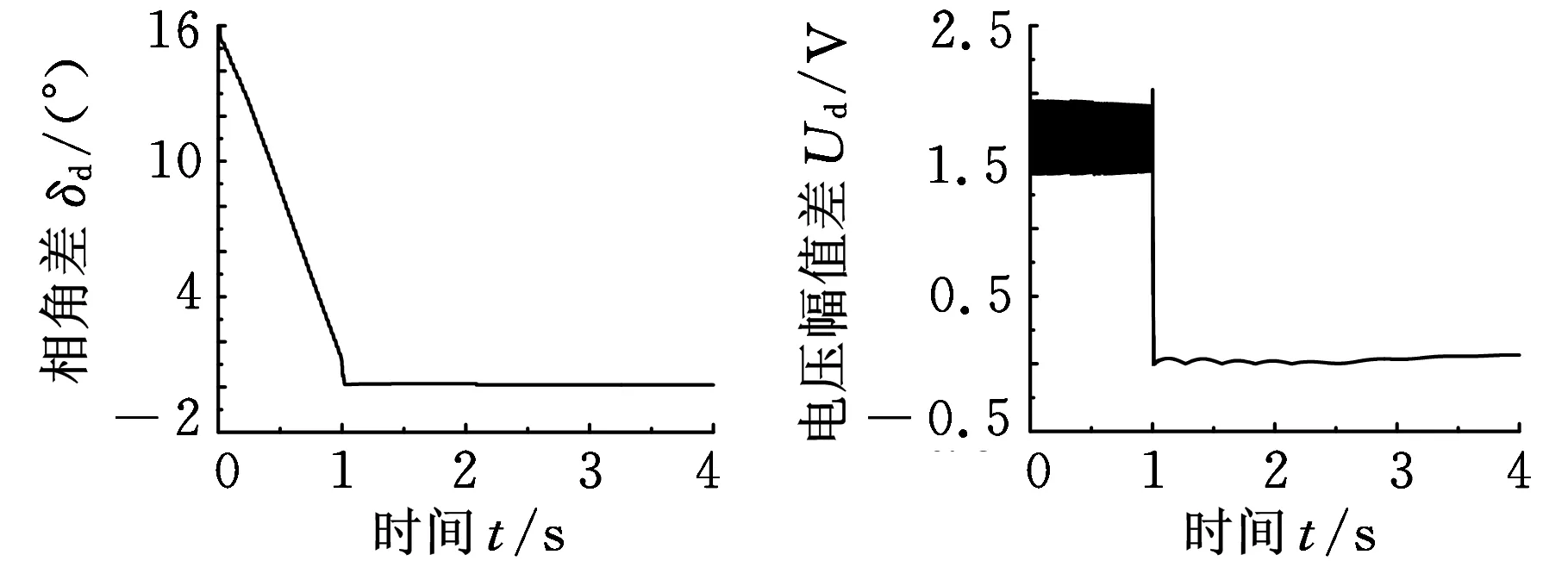
(a)相角差(b)电压幅值差
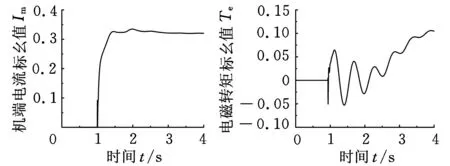
(c)机端电流(d)电磁转矩

(e)发电机转速(f)高压压力图9 并网冲击抑制仿真曲线
由图9仿真结果可知,在发电机电压和相位角与电网基本一致时合闸并网。其中,相角差为0°左右(不大于5°);电压幅值差控制在0 V上下(不超过电压幅值的最大允许误差)。采用并网冲击抑制方法,并网瞬间冲击转矩标幺值只有0.05,冲击电流标幺值只有0.09;同时发电机转速稳定于1500 r/min(±3 r/min),即发电机频率误差不超过同期并网频率的最大允许误差,保证了机组并网运行,系统压力在并网后逐渐提高,提升了机组输入电网的有功功率。采用所提出并网冲击抑制方法,可使机组在稳定并网的同时,实现并网冲击电流和冲击转矩的抑制,使机组柔性切入电网。
4.3并网冲击实验研究
对上述并网冲击抑制方法进行实验研究。采用变频电机模拟风力机典型工况,在第1 s时刻合闸并网,所得实验结果如图10所示。
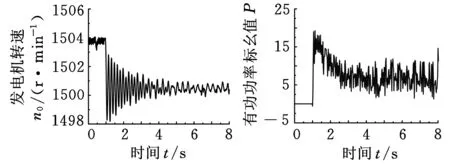
(a)发电机转速(b)有功功率
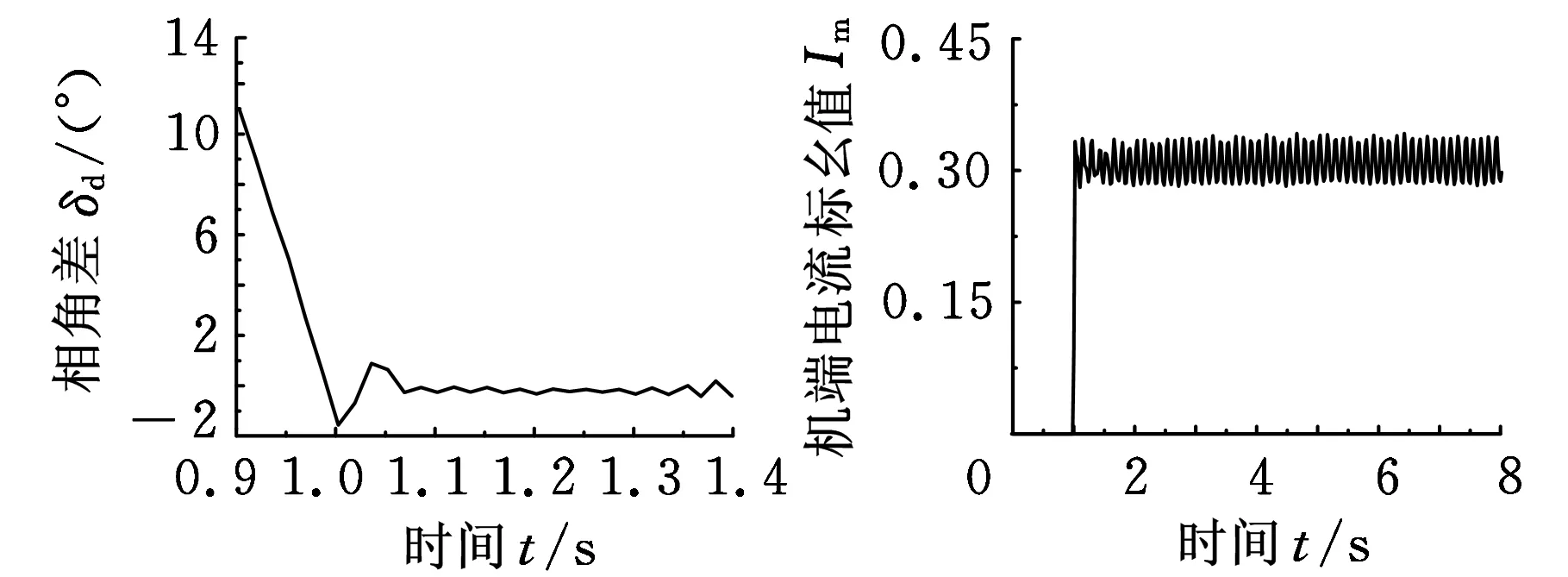
(c)相角差(d)电磁转矩
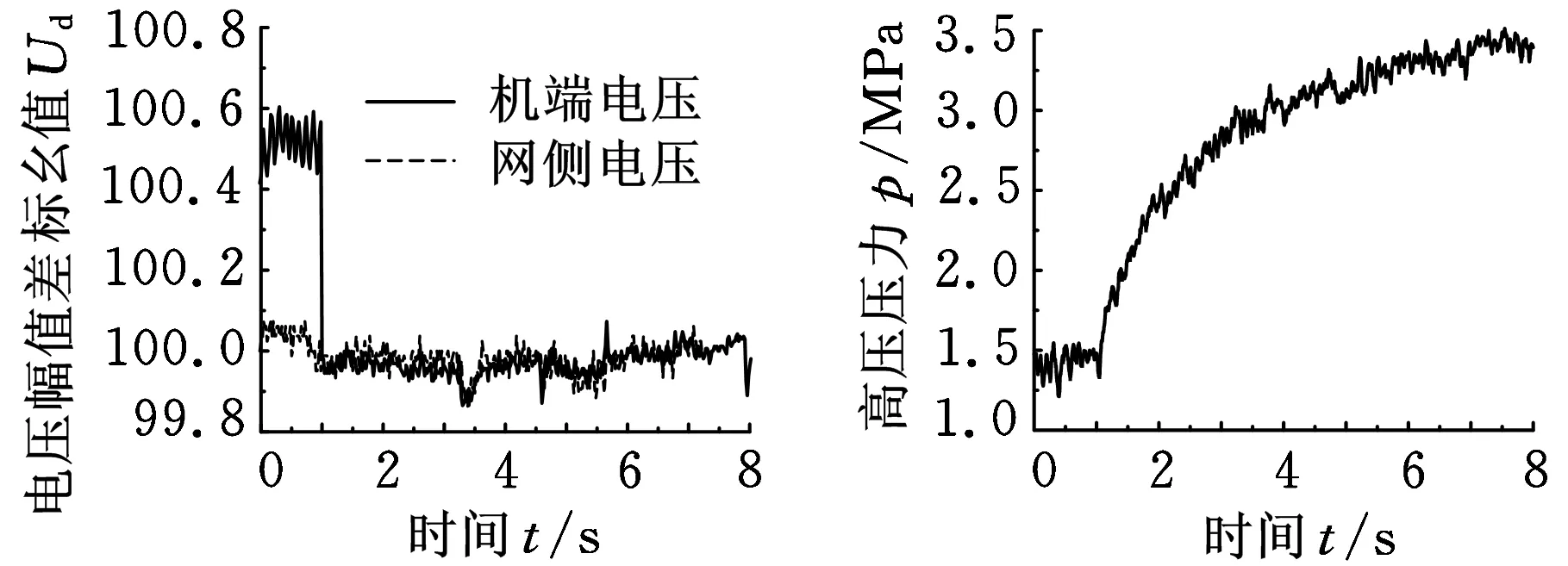
(e)电压幅值差(f)高压压力图10 并网冲击抑制实验曲线
由图10实验结果可知,在实验过程中,并网相角差为1°左右(不大于5°);机端电压与网侧电压差控制在0 V上下(不超过电压幅值的最大允许误差);发电机转速误差稳定在±4 r/min内(不超过发电频率的最大允许误差)。采用并网冲击抑制方法,发电机转速和有功功率小幅波动后趋于稳定;系统压力在并网后逐渐增大,提高了机组传输功率;整个过程无较大的并网冲击。
5 结论
(1)建立了机组风力机数学模型、定量泵-变量马达液压调速系统数学模型和励磁系统同步发电机数学模型,推导了并网冲击转矩与冲击电流数学模型。
(2)提出了一种液压型风力发电机组并网冲击抑制方法,通过发电机稳速控制、励磁电压控制和准同期监控相结合对机组并网冲击进行抑制,实现机组的柔性并网。
(3)仿真和实验分析结果表明,所提出的并网冲击抑制方法具有良好的控制效果。
[1]Guo Yi,Hosseini S,Tang C Y.An Approximate Wind Turbine Control System Model for Wind Farm Power Control[J].IEEE Transactions on Sustainable Energy,2013,4(1):262-274.
[2]Redha A M,Dincer I,Gadalla M. Thermodynamic Performance Assessment of Wind Energy System:an Application[J].Energy,2011,36(7):4002-4010.
[3]王晓,谢振宇,周红凯. 磁悬浮风力发电机零偏置电流控制策略研究[J].振动与冲击,2014,33(23):63-67.
Wang Xiao,Xie Zhenyu,Zhou Hongkai. Control Strategy with Zero-bias Current for Magnetic Levitation Wind Power Generator[J].Journal of Vibration and Shock,2014,33(23):63-67.
[4]贺益康,胡家兵. 双馈异步风力发电机并网运行中的几个热点问题[J]. 中国电机工程学报,2012,32(27):1-15.
He Yikang,Hu Jiabing. Several Hot-spot Issues Associated with the Grid-connected Operations of Wind-turbine Driven Doubly Fed Induction Generators[J]. Proceedings of the CSEE,2012,32(27):1-15.
[5]李文津,汤广福,康勇,等. 基于VSC-HVDC的双馈式变速恒频风电机组启动及并网控制[J].中国电机工程学报,2014,34(12):1864-1873.
Li Wenjin,Tang Guangfu,Kang Yong,et al. Starting Up and Integration Control of Doubly-fed Variable-speed Constant-frequency Wind Power Generator Based on VSC-HVDC[J]. Proceedings of the CSEE,2014,34(12):1864-1873.
[6]Muyeen S,Takahashi R,Tamura J.Operation and Control of HVDC-connected Offshore Wind Farm[J].IEEE Transactions on Sustainable Energy,2010,1(1):30-37.
[7]孔祥东,艾超,娄霄翔. 液压型风力发电机组并网冲击仿真研究[J]. 系统仿真学报,2012,24(9):2012-2018.
Kong Xiangdong,Ai Chao,Lou Xiaoxiang. Impact of Grid-connecting Simulation Research of Hydraulic Wind Turbine[J]. Journal of System Simulation,2012,24(9):2012-2018.
[8]Diepeveen N F B, Segeren M L A. Stretching the Applicability of the Monopile by Using a Delft Offshore Turbine [J].Wind Energy, 2012,5(3):1-10.
[9]董泳,周绪强,毕强. 风力机与液力变速传动装置匹配工作特性研究[J]. 中国机械工程,2012,23(6):660-665.
Dong Yong,Zhou Xuqiang,Bi Qiang.Research on Working Characteristics about Wind Rotor Matching with Hydrodynamic Variable Speed Drive Uint[J]. China Mechanical Engineering,2012,23(6):660-665.
[10]国家电网公司. Q/GDW392-2009风电场接入电网技术规定[S]. 北京:中国电力出版社,2009.
[11]孔祥东,艾超,闫桂山,等.液压型风力发电机组低电压穿越控制方法研究[J]. 中国机械工程,2014,25(16):2137-2142.
Kong Xiangdong,Ai Chao,Yan Guishan,et al. Research on Control Method of Low Voltage Ride Through for Hydraulic Wind Turbine[J]. China Mechanical Engineering,2014,25(16):2137-2142.
[12]李光琦. 电力系统暂态分析[M]. 3版. 北京:中国电力出版社,2007.
[13]侯亚敏. 无刷励磁同步发电机励磁控制系统的研究[D]. 广州:华南理工大学,2013.
[14]艾超,孔祥东,陈文婷,等. 液压型风力发电机组主传动系统稳速控制研究[J]. 太阳能学报,2014,35(9):1757-1763.
Ai Chao,Kong Xiangdong,Chen Wenting,et al. Research on Speed Control of the Main Translation System of Hydraulic Wind Energy Conversion System[J]. Acta Energiae Solaris Sinica,2014,35(9):1757-1763.
[15]艾超,孔祥东,闫桂山,等. 液压型风力发电机组最优功率追踪控制方法研究[J]. 动力工程学报,2015,35(2):126-133.
Ai Chao,Kong Xiangdong,Yan Guishan,et al. Research on Maximum Power Point Tracking of Hydraulic Wind Turbine[J]. Journal of Chinese Society of Power Engineering,2015,35(2):126-133.
(编辑王艳丽)
Research on Grid Impact Suppression in Hydraulic Wind Turbine
Ai Chao1,2Yan Guishan1Kong Xiangdong1,2Chen Lijuan1
1.Hebei Provincial Key Laboratory of Heavy Machinery Fluid Power Transmission and Control,Yanshan University,Qinhuangdao,Hebei,066004 2.Key Laboratory of Advanced Forging & Stamping Technology and Science(Yanshan University),Ministry of Education of China,Qinhuangdao,Hebei,066004
Taking a hydraulic wind turbine as the research object, mathematical models for wind turbine, fixed displacement pump-variable displacement motor of hydraulic system, synchronous generator and excitation system were established, for the problem of grid impact in hydraulic wind turbine. The mathematical models for impulse current and impact torque were derived. A suppression method for grid impact in hydraulic wind turbine was proposed, by the combination of generator speed control, excitation voltage control and quasi-synchronization monitoring. Using 30 kV·A hydraulic wind turbine simulation platform as the simulation and experimental foundation, the grid impact suppression was researched. Simulation and experimental results show that the grid impact suppression proposed has good control effect for impulse current and impact torque, achieving the flexible grid-connection for generator.
wind power; hydraulic transmission; grid impact; impact suppression
2015-01-30
国家自然科学基金资助项目(51405423);河北省青年基金资助项目(QN20132017);燕山大学青年教师自主研究计划课题(13LGB005)
TH137DOI:10.3969/j.issn.1004-132X.2015.15.001
艾超,男,1982年生。燕山大学机械工程学院讲师。主要研究方向为液压型风力发电机组。发表论文18篇。闫桂山,男,1988年生。燕山大学机械工程学院硕士研究生。孔祥东(通信作者),男,1959年生。燕山大学机械工程学院教授、博士研究生导师。陈立娟,女,1989年生。燕山大学机械工程学院硕士研究生。
猜你喜欢
山东冶金(2022年4期)2022-09-14
大电机技术(2022年3期)2022-08-06
农业工程学报(2022年7期)2022-07-09
山东冶金(2022年1期)2022-04-19
河北电力技术(2021年2期)2021-07-29
河北电力技术(2021年2期)2021-07-29
煤气与热力(2021年3期)2021-06-09
装备制造技术(2020年4期)2020-12-25
农业工程学报(2018年22期)2018-11-23
电子制作(2018年1期)2018-04-04