
基于模糊PID技术的交流伺服电机位置控制系统研究
2015-10-25 03:53:24洪峥,高洪
新乡学院学报 2015年9期
洪 峥,高 洪
(1.安徽工程大学机械与汽车工程学院,安徽芜湖241000;2.芜湖安普机器人产业技术研究院有限公司,安徽芜湖241000)
基于模糊PID技术的交流伺服电机位置控制系统研究
洪峥1,2,高洪1
(1.安徽工程大学机械与汽车工程学院,安徽芜湖241000;2.芜湖安普机器人产业技术研究院有限公司,安徽芜湖241000)
基于交流伺服电机的力矩特性传递函数,将交流控制系统等效为直流控制系统,并建立了其位置控制传递函数和模糊PID控制模型,然后在Simulink软件中对该交流伺服电机位置控制系统进行了仿真分析。结果表明,模糊PID控制方法具有更好的动、静态性能和抗干扰能力。
交流伺服电机;模糊PID控制;仿真
随着工业机器人行业的迅猛发展,人们对作为工业机器人可控动力源的交流伺服电机的稳定性、定位精度和可靠性的要求也越来越高。交流伺服电机虽然在现有的各类工业机器人电机控制系统中被普遍使用,但其控制方式却比较单一,都以简单的PID控制为主。该控制方法虽然结构简单、稳定性好且工作可靠,但却不能实时调节,在面对非线性、时变、耦合及参数和结构不确定的复杂过程时难以满足控制要求,而模糊控制、模糊PID控制在机械系统的应用中取得了良好的稳定性和鲁棒性[1-2]。
本文将模糊PID引入交流伺服电机位置控制系统中,并和传统PID控制进行比较,以验证模糊PID在交流伺服电机位置系统中的控制特性。
1 交流伺服电机位置控制模型的建立及化简
交流伺服电机是工业机器人驱动系统的执行元件,能对工业机器人各关节实行闭环控制。控制机器人的运动在于控制其位置、速度和加速度,速度与加速度是位移的一阶和二阶导数,而位移可由位置求得,因此运动控制主要是位置控制。交流伺服电机位置控制模型可根据力矩特性传递函数及系统的数学模型建立[3]。控制系统输入的三相正弦电流,各相之间相位相差120°,经驱动器将其转换成模拟电压。这里需控制斩波放大器,以保证绕组电流正常。绕组由电感L和电阻R构成,绕组上的电压U与电流I的关系为一阶惯性环节,经拉氏变换后得U=(Ls+R)I。
三相交流伺服系统的三相绕组转矩经拉氏变换后分别为
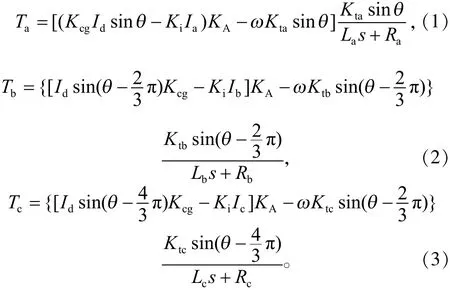
其中,Ta、Tb、Tc分别为三相绕组产生的转矩,ω为电机角速度,Kcg为电流信号前置放大系数,Ki为电流环反馈系数,Kv为速度反馈系数,KA为电流调节放大系数,Id为斩波放大器的输入额定电流,La、Lb和Lc分别为三绕组的电感,Ra、Rb和Rc分别为三绕组的电阻,Kta、Ktb和Ktc分别为三相转矩常数,Ia、Ib和Ic分别为三相绕组每一相上的电流。
为了分析伺服电机位置控制系统,我们将其简化,使其等效成直流伺服电机位置控制系统。总转矩T为

令θ=0,即sinθ=0。在电机制造时,已保证各参数相等,即Kta=Ktb=Ktc=Ktp,La=Lb=Lc=Lp,Ra=Rb=Tc=Rp。将各参数代入(1)~(4)式中,则总转矩T可简化为



图1 AC伺服电机等效结构图
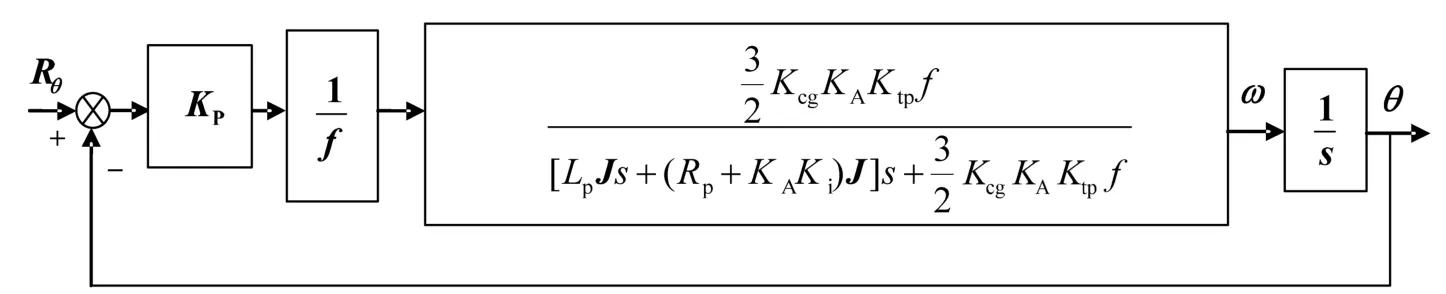
图2 AC伺服电机单位反馈系统
2 Fuzzy-PID控制模型
2.1Fuzzy-PID控制模型
模糊控制是以模糊数学为基础,将控制规则的条件和操作模糊化,并整理成集,再与专家信息整合后存入计算机,它通过智能推理实现参数的最优控制,达到优化控制器的目的。
根据1中的控制模型,选用PD二维模糊控制器[4]。它以偏差e和偏差变化率作为输入,分别乘以模糊因子Ke和K,经模糊控制器后输出ΔKp、ΔKi和ΔKd,如图3所示。
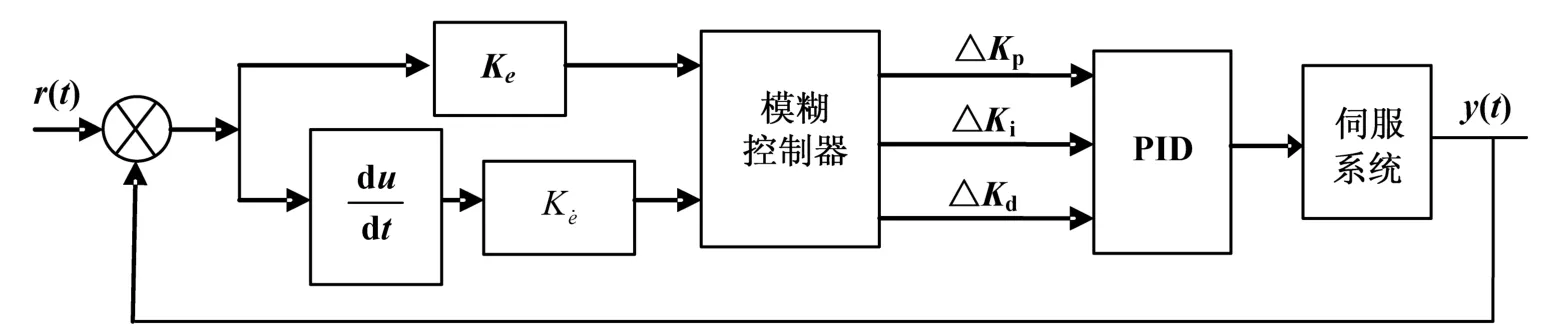
图3 自适应模糊控制器
2.2模糊集和论域的设定
模糊控制器的输入误差信号只有通过模糊化才能作为模糊控制器的输入,即将偏差e和偏差变化率模糊化;控制量ΔKp、ΔKi和ΔKd也需要进行模糊化[5]。本文中e、ΔKp、ΔKi和ΔKd的模糊集均设为7个,分别为NB(负大)、NM(负中)、NS(负小)、Z0(零)、PS(正小)、PM(正中)、PB(正大)。设定论域均为[-3,3]。
在Matlab/simulink仿真软件下设置Fuzzy控制器,推理方法为“Mamdani”,选择隶属函数为“Z形”“三角形”和“S形”。因为本文中设定e、ΔKp、ΔKi、 ΔKd模糊集和论域相同,所以其隶属度函数图相同,结果如图4所示。
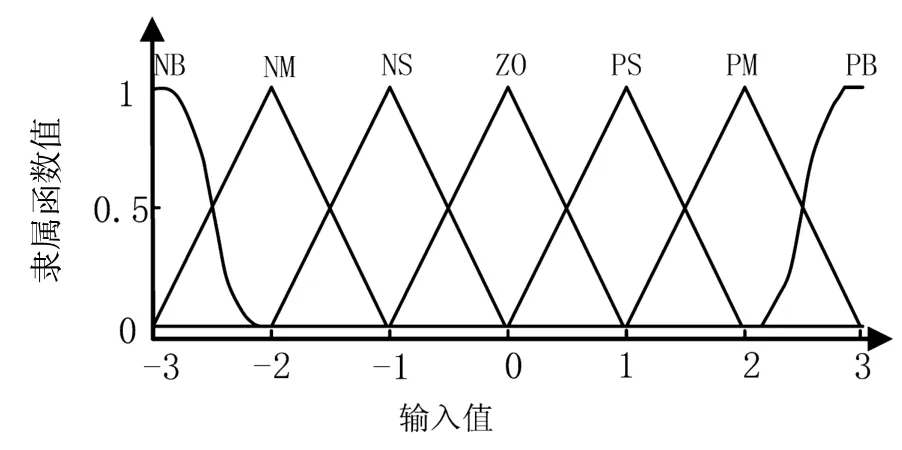
图4 e、、△Kp、△Ki、△Kd隶属度函数
2.3建立模糊控制规则
根据ΔKp、ΔKi和ΔKd的输出特性,及e和不断变化的特性,得出ΔKp、ΔKi、ΔKd自整定原则[6],即当以不同的e和作为输入时,根据PID模糊控制的特点,ΔKp、ΔKi和ΔKd会呈现规律性的变化。根据此变化特点,以及工程设计人员的技术知识和实际操作经验,建立合适的关于e 、、ΔKp、ΔKi、ΔKd模糊规则,所建立的ΔKp、ΔKi、ΔKd模糊规则控制表见表1、表2和表3。
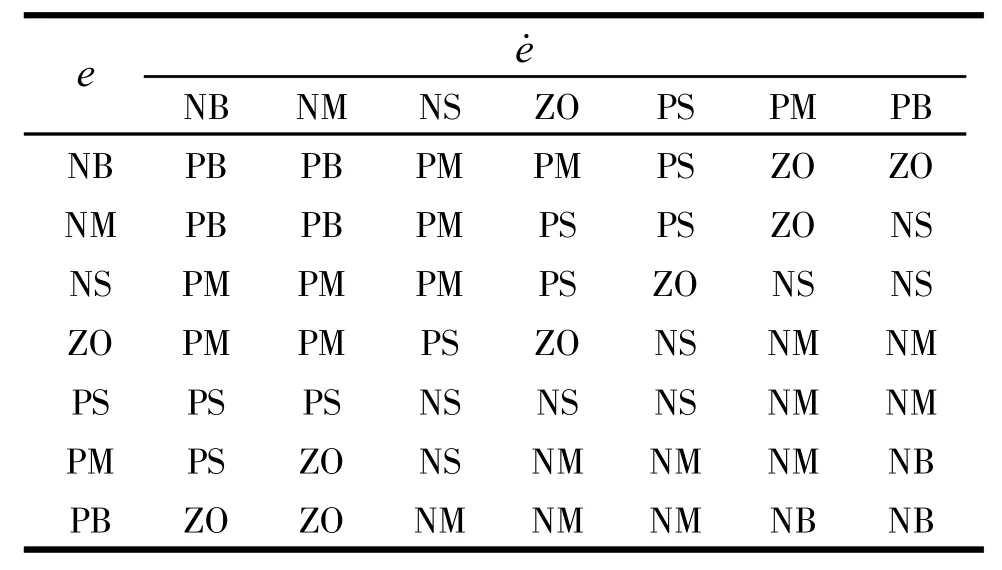
表1 △Kp模糊规则表
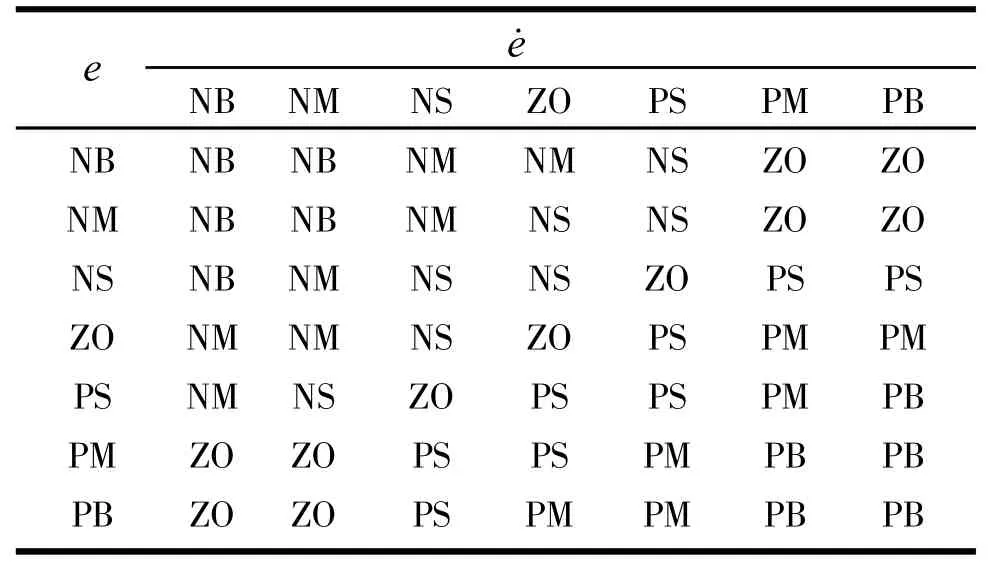
表2 △Ki模糊规则表
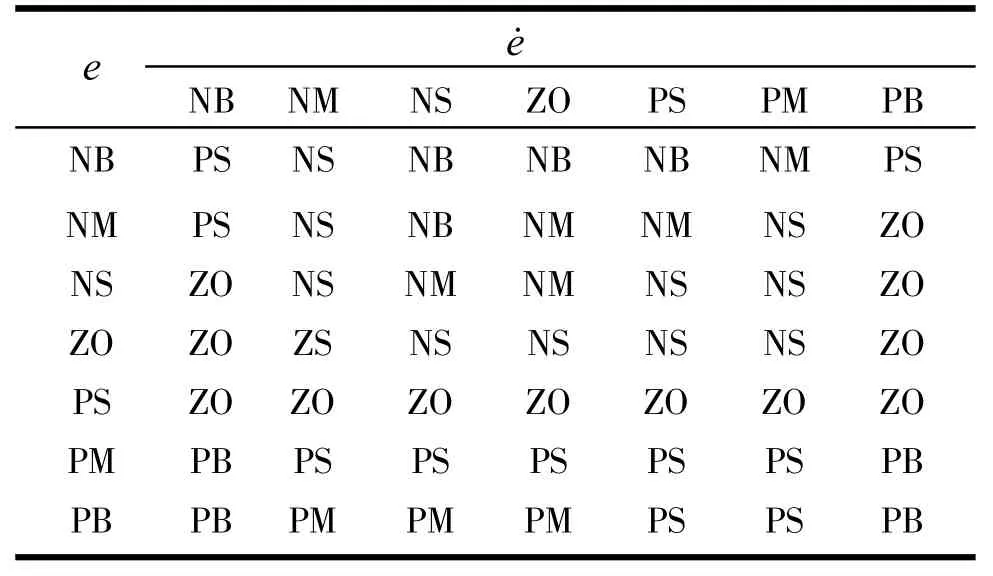
表3△Kd模糊规则表
2.4去模糊化
根据表1、表2和表3可对ΔKp、ΔKi和ΔKd进行动态整定。设Kp、Ki和Kd为设定的初始PID控制值,利用重心法对输入的模糊集合进行去模糊化处理,得到精确的ΔKp、ΔKi和ΔKd后即可得模糊PID参数K′p=Kp+ΔKp,K′i=Ki+ΔKi和K′d=Kd+ΔKd。
3 Simulink仿真分析
用于电机仿真的参数有:位置增益Kp=4,前置放大器增益Kcg=88,转矩常数Ktp=3.41 N· m/A,绕组电感Lp=0.038 37 H,绕组电阻Rp=5.09 Ω,电动机轴上总转动惯量J=0.39 kg· m2,并设定模糊因子Ke和K均为0.1,比例因子K1、K2和K3均为0.1。根据机器人位置精度要求和稳定性要求,选定传统PID参数为Kp=4,Ki=0.05,Kd=1.2。
在Matlab/Simulink环境下分别对该系统进行模糊PID仿真,仿真模型如图5和图6所示。
将仿真结果与传统PID控制相比较,结果如图7所示。从图7可以看出,模糊PID稳定时间在0.5 s左右,且无超调;而传统PID稳定时间在1.8 s左右。可见,模糊PID在交流伺服电机位置控制时的稳定时间明显短于传统PID控制,因此能很快进入稳定状态,且无超调,能够满足现代工业对机器人精度的要求。
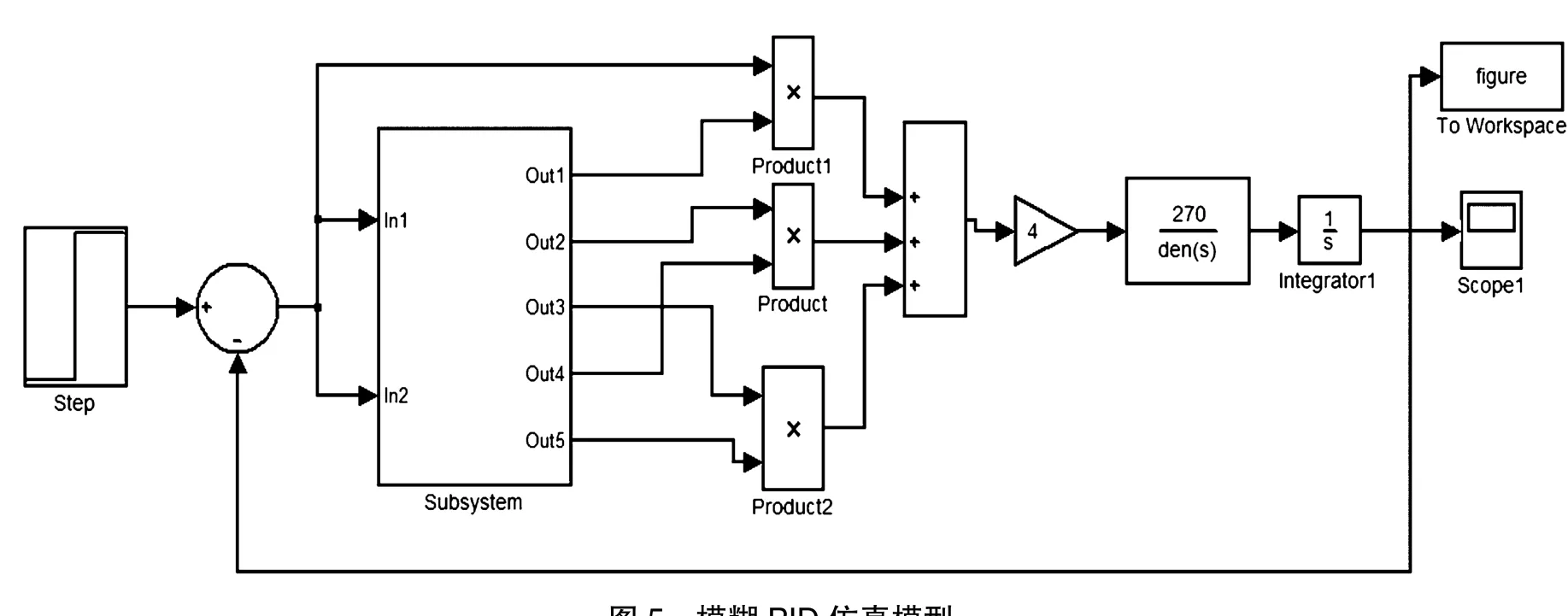
图5 模糊PID仿真模型
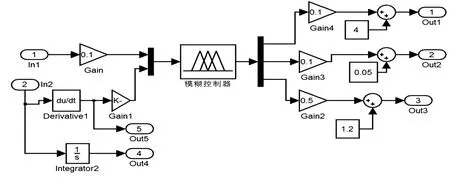
图6 模糊控制器组成模型
4 结束语
就交流伺服电机位置系统控制而言,采用PID或模糊PID控制器,虽然均无超调,但后者响应速度更快,可在线自动调整控制参数,有效地解决控制系统的适应性和稳定性差等问题,且其抗干扰能力和鲁棒性完全能够满足工业机器人伺服系统的控制要求。
[1]XU J Z,QIA0 M,WANG W,et al.Fuzzy PID Control for AC Servo System Based on Stribeck Friction Model[J]. IEEE,InternationalForumonStrategicTechnology,2011,2(6):706-711.
[2]D0U Z L,CHENG M Z,LING Z B,et al.An Adjustable Pitch Control System in a Large Wind Turbine based on a Fuzzy-PID Controller[R].IEEE,International Symposium on Power Electronics,Electrical Drives,Automation and Motion,2010:391-395.
[3]孙迪生,王炎.机器人控制技术[M].北京:机械工业出版社,1997:206-209.
[4]李士勇.模糊控制·神经控制和智能控制论[M].哈尔滨:哈尔滨工业大学出版社,2004:263-280.
[5]陶永华,尹怡欣,葛芦生.新型PID控制及其应用[M].北京:机械工业出版社,1998:95-110.
[6]党建武,赵庶旭,王阳萍,等.模糊控制技术[M].北京:中国铁道出版社,2007:114-118.
【责任编辑梅欣丽】
Research on the Control of AC Servo Motor Position System Based on Fuzzy-PID Technology
HONG Zheng1,2,GAO Hong1
(1.School of Mechanical and Automotive Engineering,Anhui Polytechnic University,Wuhu 241000,China;2.Wuhu Anpu Institute of Technology Robotics Industry Company Limited,Wuhu 241000,China)
Based on the transfer function of AC servo motor's torque characteristics,the AC control system was simplified as DC control system.The control models of the position control's transfer function and fuzzy-PID were established.Then the systems were simulated by Simulink soft.The results of analysis showed that the Fuzzy-PID control had better performance of dynamic,static and anti-interference.The research provided technological base for AC servo motor position control.
AC servo motor;Fuzzy-PID control;simulation
TP273+.4
A
2095-7726(2015)09-0056-04
2015-04-12
洪峥(1989-),男,安徽绩溪人,硕士研究生,研究方向:机器人控制。
猜你喜欢
厦门大学学报(自然科学版)(2022年4期)2022-07-15 08:58:40
微特电机(2020年11期)2020-12-30 19:42:32
现代装饰(2020年7期)2020-07-27 01:27:50
运筹与管理(2019年10期)2019-12-17 06:07:12
电子制作(2018年17期)2018-09-28 01:57:00
通信电源技术(2018年3期)2018-06-26 06:33:36
西南交通大学学报(2016年3期)2016-06-15 20:29:35
电子制作(2016年21期)2016-05-17 03:53:01
工业设计(2016年6期)2016-04-17 06:42:53
通信电源技术(2016年5期)2016-03-22 01:09:57
