
超空泡航行器流体动力CFD计算
2015-10-25 05:44:11李雨田
水下无人系统学报 2015年4期
李雨田
(中国船舶重工集团公司 第710研究所,湖北 宜昌,443003)
超空泡航行器流体动力CFD计算
李雨田
(中国船舶重工集团公司 第710研究所,湖北 宜昌,443003)
超空泡航行器运动在超空化流动模式下,流场内涉及固、液、气3种介质,空泡与航行器相互耦合作用极为复杂。文中给出了超空泡航行器减阻特性、非线性、非定常与不确定性、流体惯性力较小4种典型流体动力特性,揭示了超空泡航行状态下航行器的流体力学本质。通过仿真计算,得到了空泡外形随空化数、攻角、舵角的变化趋势,利用计算流体力学(CFD)方法计算给定外形航行器在超空泡流型下的受力情况,分析了航行器流体动力特性变化,并给出了影响其变化的相关因素。该研究可为超空泡航行器动力学建模和弹道计算提供参考。
超空泡航行器;空泡外形;流体动力特性;计算流体力学(CFD)
0 引言
长期以来,水下航行器的航速都比较低,制约水下航行器速度提高存在2个障碍:首先是航行阻力大,航行器的航行阻力与流体介质密度成正比,水下航行器与空中飞行器相比,由于水的密度是空气的800倍,同样条件下,水下航行器的航行阻力是空中飞行器飞行阻力的800倍,所以,水下航行器的航行速度比空中飞行器的飞行速度低2~3个量级。其次,水下航行器随着航行速度的提高,其表面局部的压力就会降至水的饱和蒸汽压力,发生汽化,形成气泡与局部空泡。这种空泡的起始、发展及溃灭受环境等多种因素影响,十分复杂,难以预计与控制,并且伴随产生振动、噪声与剥蚀等一系列不良后果。这种空化现象是水下高速航行器的一种客观物理现象,当航速超过60 kn以上时难以避免。俄罗斯科学家经过长期的研究,提出了“超空泡航行器”的新概念[1],把水下航行器基本包围在空泡之中,如图1所示,使航行器壁面附近的介质由水变为气体,水下航行器表面与水隔绝,从而大大降低航行阻力,解决了水下航行器阻力大的难题。降低航行器周围流体介质的密度是超空泡减阻的基本原理。在水下航行器自然空化发生的基础上,通过人工通气[2-3],使航行器表面的空泡面积增大,发展为超空泡,并使空泡稳定。通气方法不仅可以实现航行器的超空泡,而且使得对空泡的控制成为可能,可以有效地避免局部空化造成的振动、噪声等不良后果。这就从根本上解决了阻碍水下航行器速度提高的两大难题,为实现水下航行器航行航速的大幅度提高奠定了理论基础。

图1 水下超空泡航行器Fig.1 Underwater supercavity vehicle
利用超空泡减小水下航行器的阻力,是空化应用中最具重大意义的发现,如同空气介质中飞行器速度突破音障一样,超空泡减阻将给水下航行器带来一场影响深远的技术革命,甚至改变未来海军的作战模式。
1 超空泡航行器流体动力特性
超空泡航行器流体动力需将航行器外形、空泡外形、航行器外形和空泡外形的几何匹配统一起来,综合考虑相互之间的影响。超空泡航行器外形主要由空化器、壳体及尾舵3部分组成,3部分的流体动力成因具有各自明显的特征。位于航行器前端的空化器其迎流面总是处于沾湿状态,流体动力与迎流攻角或空化器舵角有关,受空泡的影响较小。尾舵与空泡的关系可以简化为与尾舵穿刺空泡长度(尾舵展向位于主体空泡之外的长度)的关系,尾舵穿刺空泡长度可通过“超空泡流型”[4-5]计算获得,在穿刺长度一定时,尾舵受力变化与舵角有关。壳体的流体动力主要来自壳体尾部的沾湿面,所以也常称为航行器尾部流体动力,尾部流体动力是超空泡航行器流体动力的主要部分,也是变化较大、计算误差较大的部分。
超空泡航行器运动在超空泡流动模式下,只有首部空化器、尾部壳体和尾舵局部沾湿,具有不同于常规水下航行器的流体动力特性,主要表现在以下几个方面。
1)减阻特性。航行器绝大部分表面不与水接触,摩擦阻力大幅降低,通过适当的外形设计,自主航行的水下超空泡航行器阻力系数与同级别全沾湿航行器相比可以降低1个量级。
2)非线性。由于细长体空泡与航行器位置关系随攻角增大而快速非线性增大,导致航行器流体动力的非线性。超空泡航行器流体动力的非线性还表现在操纵面上,对于安装在尾部的稳定和操纵面,由于空泡偏离导致沾湿面积的非线性变化,使操纵面穿刺深度和沾湿面积随攻角非线性变化,形成非线性的流体动力。
3)非定常性与不确定性。由于超空泡的尺度受航行深度、速度、通气流量以及泄气方式的影响,空泡尺寸处于脉动状态,难以精确确定,导致流体动力具有显著的非定常性与不确定特征。
4)流体惯性力较小。在超空泡航行状态下,由于加速度与沾湿面积都较小,流体附加质量相对于航行器质量为小量。
航行器的流体动力有多种分类方法或结构模式[6]。文章按运动状态分解超空泡航行器流体动力,即采用位置力、阻尼力和惯性力的流体动力结构模式。
2 空泡外形仿真与流体动力计算
2.1超空泡航行器外形
文中参考 “暴风雪”鱼雷外形参数[7-8],结合西北工业大学课题组研究成果[9-10]给出一种超空泡航行器外形,采用1:1比例模型作为输入参数用于CFD计算。航行器外形由空化器(圆盘形)、圆锥段、圆柱段、尾喷管、十字尾舵(楔形翼)等部分构成,航行器外形及主要参数如图2所示。
2.2CFD计算方法
1)计算原理
位置力的计算原理参照水洞测力试验,固定模型,让水以指定相对攻角α流过模型,测得模型承受的流体动力和力矩随相对攻角的变化曲线。如图3所示,取一柱形计算域,通过改变入口速度及其方向矢量可以得到不同空化数和攻角,计算得到随空化数和攻角变化的位置力系数。
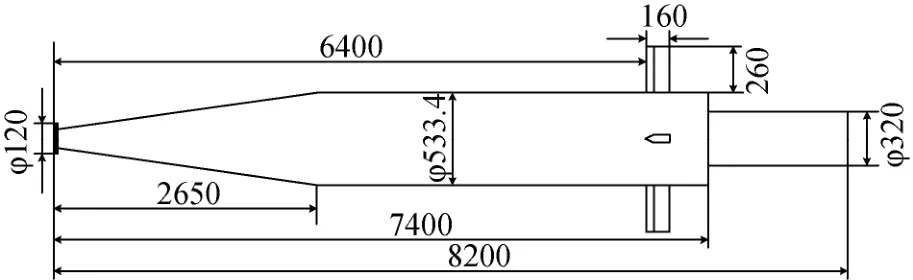
图2 超空泡航行器外形及主要参数(单位:mm)Fig.2 Shape and main parameters of a supercavity vehicle(unit:mm)
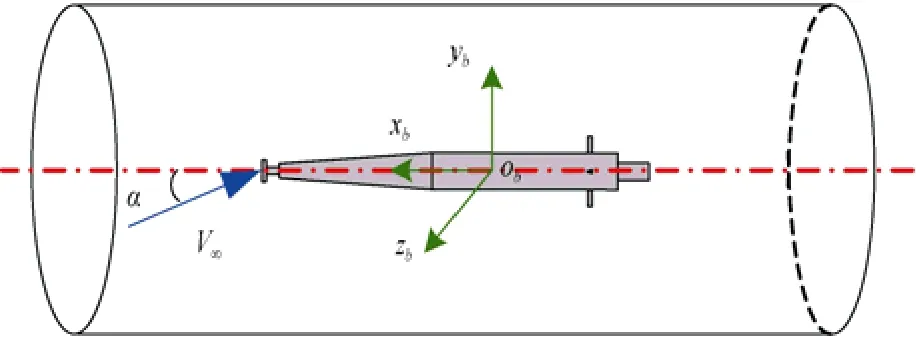
图3 位置力计算原理Fig.3 Calculation principle of position force
旋转导数计算原理见图4,利用FLUENT软件提供的旋转参考框架,将相对运动转换为定常流场。指定旋转参考框架的角速度,即可模拟俯仰/偏航运动,做定常流场计算,得到不同角速度下的流体动力系数,线性拟合得到旋转导数。
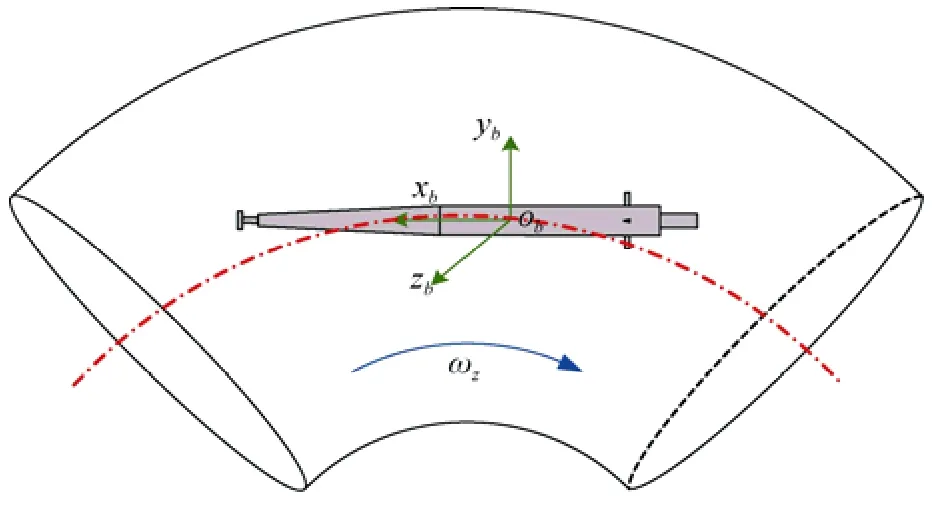
图4 旋转导数计算原理Fig.4 Calculation principle of rotary derivative
2)计算域与网格划分
计算域为1个直径为50倍模型最大直径、长度为30倍模型长度的圆柱体。上游速度入口距离头部端面为5倍模型长度,下游压力出口距离头部端面为25倍模型长度,外围流场压力出口距离模型中心线为25倍模型最大直径。建模时取一半计算域,采用结构化六面体网格划分流场,利用网格接口技术解决整个计算域内网格密度的非均匀分布问题,并在空泡可能产生的区域加密网格,以便更清晰地扑捉空泡界面。位置力计算域如图5所示。

图5 位置力计算域与边界条件Fig.5 Computation domain and boundary condition of position force
阻尼力计算区域与边界条件设置和网格划分情况与位置力相似,不再赘述。其计算区域与边界条件设置如图6所示。

图6 阻尼力计算域与边界条件Fig.6 Computation domain and boundary condition of damping force
3)计算模型参数设置
CFD求解模型及参数的设置见表1,边界条件的参数设置见表2。
2.3空泡外形与流体动力计算结果
2.3.1位置力计算
1)空化器舵效
计算空化器在空化数为0.021 17,舵角在0°~1.5°范围的受力情况,每0.3°为1个计算工况。图7为空化器舵角变化对空泡形态的影响,随着舵角的增大,空化器在航行器轴线上的有效投影面积减小,投影面积由正圆向椭圆变化,造成空泡尺寸减小,同时空泡截面由正圆向椭圆变化。
图8为空化器流体动力系数随舵角变化的曲线。图8(a)为阻力系数曲线,由计算结果可知空化器阻力系数随舵角增大逐渐减小,其量值变化较小,主要原因是在小舵角范围内空化器的迎流面积随舵角增大而减小,但减小的量值较小。图8(b)为空化器升力系数随舵角变化曲线,升力系数随舵角增大而增大,变化趋势较复杂,在0°~ 0.9°舵角范围,升力系数基本呈线性变化,当舵角大于0.9°时,升力系数增大较快,基本按指数形式增大。图8(c)为空化器俯仰力矩系数随舵角变化曲线,力矩系数为零,原因在于超空泡航行器动力学建模的作用中心为空化器,航行器以空化器为基点做俯仰、偏航摆动,故空化器只产生升力不产生俯仰力矩。
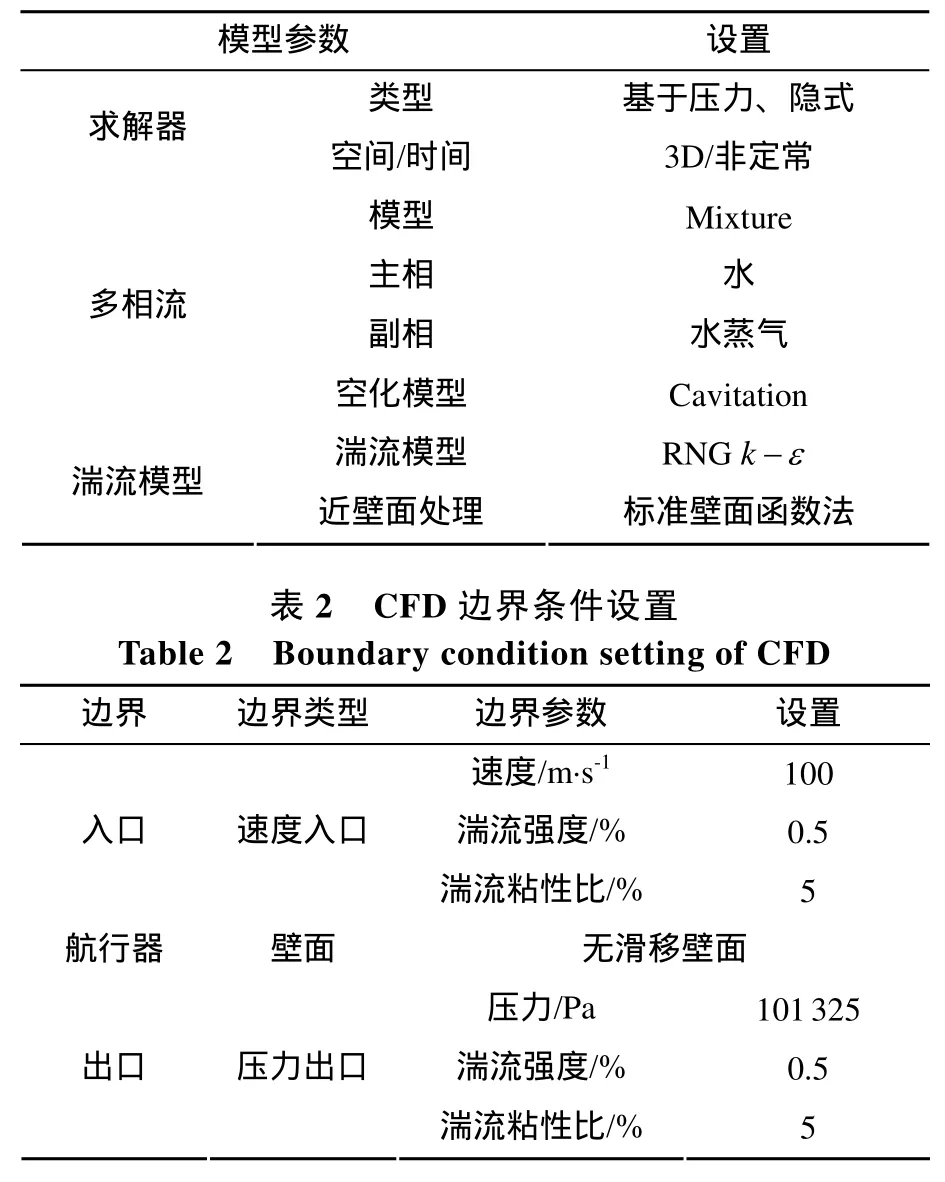
表1 CFD计算模型和参数设置Table 1 Computational model and parameter setting ofcomputational fluid dynamics(CFD)

图7 空化器舵角变化对空泡形态的影响Fig.7 Influence of rudder angle of cavitator on cavity shape

图8 空化器位置力系数随舵角变化曲线Fig.8 Curves of position force coefficients of cavitator versus rudder angle
2)航行器位置力
a.空化数对航行器主体空泡的影响仿真
在空化器尺寸一定的前提下,空化数是最能够影响空泡外形尺寸的参数,通过改变空化数的大小,研究空泡和航行器的位置包络关系。如图9所示,为空化数对航行器零攻角下空泡形态的影响仿真。当空化数较大时(图9 a),形成双空泡流型,空化器诱导空泡包裹在圆柱段,尾舵和尾端面诱导空泡叠加在一起形成复杂的尾部空泡。随着空化数的减小,空泡主体在航行器的包裹位置逐步向尾部移动,直至和尾部空泡合为一体。尾舵沾湿面随着空化数减小,由全沾湿向不同穿刺主体空泡长度过渡。
b.攻角对航行器主体空泡的影响仿真
设定空化器舵角为0,空化数为0.021 17,对应尾舵半穿刺主体空泡(图9 c),计算航行器在攻角0°~1.5°的空泡形态变化和受力变化。
小攻角变化下,仅造成航行器尾部壳体和尾舵沾湿面的变化,不会影响圆锥段空泡形态,因此只给出攻角变化对航行器尾部壳体和尾舵空泡影响的局部图,如图10所示。
图9 空化数对航行器空泡的影响Fig.9 Influence of cavitation number on cavity of a vehicle

图10 攻角对航行器尾部空泡形态的影响Fig.10 Influence of attack angle on cavity shape at vehicle stern
随着攻角的增大,主体空泡由头至尾向上翘,造成尾部壳体底部沾湿,且沾湿面逐渐增大;造成尾垂直舵穿刺空泡非对称变化,尾上舵逐渐包裹在空泡内,尾下舵由半沾湿向全沾湿变化。航行器尾端面在0.8°左右攻角出现沾湿,当攻角增大到1.5°左右,尾部端面一半沾湿,尾水平舵将全沾湿。
图11为航行器位置力系数随攻角变化的计算值。图11(a)表示阻力系数变化曲线,随着攻角增大,航行器尾部沾湿面增大,摩擦阻力增大,阻力系数增大;以0.9°左右的攻角为界,0.9°以内其阻力系数变化不明显,大于0.9°阻力系数变化较快。图11(b)和图11(c)为航行器升力系数和俯仰力矩系数随攻角变化,0.9°攻角以内升力和俯仰力矩量值几乎为零,大于0.9°攻角量值迅速增大,表明航行器在空泡内非沾湿状态下几乎不产生升力。
图11 航行器流体动力系数随攻角变化曲线Fig.11 Curves of hydrodynamic coefficients of a vehicle versus attack angle
3)尾舵舵效
尾舵舵效与穿刺空泡长度和舵角有关。空泡扰动、空泡泄气、航行器非定常运动等都将影响尾舵穿刺空泡长度的变化。在此,仅计算定常状态下,尾舵不同穿刺长度的受力变化和尾舵半穿刺空泡长度下随舵角改变的受力变化。图12为尾舵穿刺不同空泡长度的仿真。

图12 尾舵穿刺空泡长度变化Fig.12 Length change of tail rudder puncturing cavity
图13为尾舵阻力系数随穿刺空泡长度变化的计算值,其数值随穿刺空泡长度增大而增大,阻力增大的影响因素主要是摩擦阻力增大。由于升力系数和力矩系数量值较小且几乎不变,故没有给出二者的计算结果。
图14为尾舵半穿刺空泡下舵角变化对尾舵受力影响的计算结果,舵角变化范围为0°~8°,每2°一个工况。由计算结果可以得出,尾舵流体动力系数变化呈分段特征,以4°舵角为界,4°舵角内尾舵的阻力系数随舵角变化较小,大于4°舵角阻力系数迅速增大;升力系数、力矩系数变化特征和阻力变化趋势相反,前期变化迅速,后期变化较缓。计算结果给出了楔形翼舵的升力和力矩特性。
图13 尾舵阻力系数随穿刺长度(空化数)的变化曲线Fig.13 Curves of resistance coefficient of tail rudder versus puncturing length(cavitation number)
图14 尾舵流体动力系数随舵角变化曲线Fig.14 Curves of hydrodynamic coefficients versus rudder angle
2.3.2阻尼力计算
1)计算参数
模型参数设置同表1和表2。设定线速度为100 m/s,回转角速度分别为0.2/0.4/0.6/0.8/1.0/ 1.2/1.4 rad/s,对应的回转半径分别为500/250/ 166.7/125/100/83.3/71.4 m。
2)阻尼力计算结果
回转运动流场仿真结果如图15所示。阻尼力系数随回转角速度变化曲线如图16所示。由计算结果可知,航行器阻尼力系数随回转角速度的变化曲线呈非线性,主要是由空泡轴线弯曲造成航行器尾部非对称沾湿造成的。

图15 回转运动下的空泡形态Fig.15 Cavity shape in rotational motion

图16 阻尼力系数随角速度变化曲线Fig.16 Curves of damping force coefficients versus angle velocity
4 结束语
超空泡航行器的外形、空泡形态、流体动力和运动的一体化耦合计算是超空泡航行器流体动力与总体设计方法的发展方向,国内目前已有一定基础,在提高计算精度上尚需继续努力。
文中研究了超空泡航行器的流体动力特性,仿真得到空泡外形的变化规律,基于CFD方法计算了给定模型的流体动力系数,计算方法采用了自然空化模型,计算值需结合通气空化模型计算结果和模型实验结果进行修正。文中的研究内容能够为超空泡航行器动力学建模和弹道计算提供数据参考。
[1]Savchenko Yu N.Supercavitation-Problems and Perspectives[C]//Fourth International Symposium on Cavitation,California Institute of Technology,Pasadena,CA USA.2001.
[2]Semenenko V N.Artificial Supercavitation Physics and Calculation[G]//RTO AVT/VKI Special Course:Supercavitating Flows.Belgium,Rhode-Saint-Genese.:Von Karman Institute for Fluid Dynamics,2001.
[3]Savchenko Y N.Experimental Investigation of Supercavi tating Motion of Bodies[G]//RTO AVT/VKI Special Course:Supercavitating Flows.Belgium,Rhode-Saint-Genese:Von Karman Institute for Fluid Dynamics,2001.
[4]李雨田,张宇文.超空泡航行器机动运动研究[D].西安:西北工业大学,2013.
[5]李雨田,张宇文.空泡外形对超空泡航行器机动回转运动影响[J].振动与冲击,2014,33(16):165-170.
Li Yu-tian,Zhang Yu-wen.The Influence of Cavity Shape on Maneuvering Rotational Movement of Supercavitating Vehicle[J].Journal of Vibration and Shock,2014,33(16):165-170.
[6]黄景泉,张宇文.鱼雷流体力学[M].西安:西北工业大学出版社,1989.
[7]Vlasenkoz Yu D.Control of Cavity Parameters at Supercavitating Flow[R],AGARD Report,Kiev Ukraine,1997.
[8]Kuklinski R.Experimental Study of Ventilated Cavity on Dynamic Test Model[C]//CAV 2001:Session B3.004.
[9]邓飞,张宇文.水下超空泡航行器流体动力设计原理研究[J].西北工业大学学报,2004,22(6):806-810.
Deng Fei,Zhang Yu-wen.On Hydrodynamic Design of Underwater Supercavitating High Speed Vehicle[J].Journal of Northwestern Polytechnical University,2004,22(6):806-810.
[10]邓飞,张宇文,超空化航行器原理试验模型结构设计[J].机械科学与技术,2005,24(4):434-437.
Deng Fei,Zhang Yu-wen.Design of the Test Model for Ventilated Supercavitating High-speed Underwater Vehicles[J].Mechanlcal Science and Technology,2005,24(4):434-437.
(责任编辑:陈曦)
Calculation of Hydrodynamic Characteristics of Supercavity Vehicle with CFD Method
LI Yu-tian
(The 710 Research Institute,China Shipbuilding Industry Corporation,Yichang 443003,China)
In the mode of supercavitation,the flow field of an underwater vehicle involves three types of media——solid,liquid and gas,and the inter-coupling effect of cavity and vehicle is extremely complicated.In this paper,four typical characteristics of fluid dynamics of a supercavity vehicle,i.e.resistance reduction characteristic,nonlinear,unsteady and uncertain,and smaller fluid inertia force,are summarized,and the nature of fluid dynamics for an underwater vehicle in supercavitation is revealed.The cavity shapes are simulated with the changes of cavitation number,angle of attack,and angle of rudder.The method of computational fluid dynamics(CFD)is used to calculate the forces on a supercavity vehicle with given shape under different conditions.The changes of hydrodynamic characteristics of the vehicle,as well as the relevant influencing factors,are analyzed.
supercavity vehicle;cavity shape;hydrodynamic characteristic;computational fluid dynamics(CFD)
TJ630.1;O353
A
1673-1948(2015)04-0262-07
2015-04-24;
2015-05-28.
李雨田(1981-),男,博士,主要从事水下航行器流体动力研究.
猜你喜欢
油气·石油与天然气科学(2021年7期)2021-09-10 04:16:51
数字海洋与水下攻防(2021年2期)2021-05-08 08:01:26
宇航总体技术(2019年5期)2019-10-11 07:32:56
中国机械工程(2018年21期)2018-11-13 08:54:18
柴油机设计与制造(2018年2期)2018-08-29 00:51:14
北京航空航天大学学报(2017年7期)2017-11-24 05:27:22
电子制作(2017年24期)2017-02-02 07:14:27
系统工程与电子技术(2016年2期)2016-04-16 05:17:00
船海工程(2015年4期)2016-01-05 15:53:28
振动与冲击(2015年2期)2015-05-16 05:37:34
