过调制技术在光纤陀螺寻北中的应用
2015-10-24 02:11周一览
浙江大学学报(工学版) 2015年9期
周一览
(浙江大学光电科学与工程学院,浙江杭州310027)
过调制技术在光纤陀螺寻北中的应用
周一览
(浙江大学光电科学与工程学院,浙江杭州310027)
针对光纤陀螺的寻北精度受测量噪声限制的问题,提出采用过调制技术提高光纤陀螺寻北精度的方案.以4位置寻北方法为例进行的理论和数值仿真分析表明:光纤陀螺的寻北误差与随机游走系数成正比.降低光纤陀螺的随机游走系数(RWC)可以等比例提升其寻北精度.过调制技术通过选择最佳调制相位对光纤陀螺的信噪比进行优化,可以有效降低光纤陀螺的随机游走系数.进行过调制前、后光纤陀螺的寻北实验,结果表明:过调制后光纤陀螺的随机游走系数降低程度与寻北精度提升程度相当,均约为30%,符合理论分析和计算结果,说明采用过调制技术可以有效提高光纤陀螺的寻北精度.
光纤陀螺(FOG);寻北;4位置;过调制;最佳调制相位;随机游走系数
基于光纤陀螺的寻北仪与其他陀螺寻北仪相比,具有成本低、启动时间短以及可靠性高等优点,是寻北技术发展的热点方向[1].由于光纤陀螺的测量噪声较大,常规手段下光纤陀螺寻北精度不高,目前,国内最高精度的光纤陀螺寻北仪寻北精度为0.04°~0.06°,与传统的挠性、激光陀螺寻北仪(精度为0.02°~0.03°)相比有较大差距[2].在现有光纤陀螺技术条件下,如果能通过一定的手段,提升光纤陀螺的寻北应用性能,在国防军事领域将具有很高的应用价值.
过调制技术是数字闭环光纤陀螺中的一项新技术,可以提高光纤陀螺的信噪比,降低随机游走系数[3],使光纤陀螺的静态性能得到较好的提升.在光纤陀螺的寻北应用中,陀螺的测量对象是地球自转角速度的分量[4],测量环境为准静态,因此,如果在寻北应用的光纤陀螺中采用过调制技术,可以提高寻北测量的信噪比,从而提高寻北精度.
本文以4位置寻北方法为例,分析光纤陀螺测量噪声与寻北测量误差的关系,通过数值仿真得到光纤陀螺随机游走系数与寻北精度之间的对应关系,阐述光纤陀螺过调制技术的原理,对采用过调制技术降低随机游走系数的光纤陀螺进行寻北实验,验证采用过调制技术能够提高光纤陀螺的寻北精度.
1 光纤陀螺寻北原理
光纤陀螺寻北是指通过测量不同方向的地球自转角速度分量计算被测方向与真北方向的夹角[5].
以最常用的4位置寻北方法为例,该方法分别在包括被测方向在内的4个相互正交的位置上测量地球自转角速度分量,进而解算出被测方向的方位角.如图1所示,N为北向,FOG-AXIS为光纤陀螺敏感轴,P1为被测方向所在位置,θ为P1与北向的夹角,P2、P3和P4与P1位置的夹角分别为90°、180°和270°.

图1 4位置寻北示意图Fig.1 Scheme of 4-position north-seeking
光纤陀螺在4个测量位置上的输出Gi(i=1,2,3,4)分别为

式中:K为光纤陀螺标度因数,ωE为地球自转角速度,φ为测量点的地理纬度,θ为被测方向的方位角,εi分别为4个位置陀螺的测量噪声.当将4个位置陀螺的测量值视为短时间内等精度、独立测量时,可以忽略εi的差异,则容易推导出被测方向的方位角解算公式:

设4个位置陀螺的测量噪声均为σ0,根据误差合成原理,可以推导出方位角的误差σθ与σ0的关系:

由式(3)可知,4位置寻北法得到的方位角测量误差与陀螺的测量噪声成正比,随地理纬度的增大而增大,与方位角本身无关.
2 光纤陀螺随机游走系数与寻北精度的对应关系
光纤陀螺的噪声通过随机游走系数来衡量,随机游走系数是指由白噪声产生的随时间积累的光纤陀螺输出误差,与白噪声的幅值线性相关,是表征光纤陀螺中角速率白噪声大小的一项技术指标[6].
通过数值仿真方法,可以推导出光纤陀螺随机游走系数与寻北误差的关系.仿真方法如下:构建随机游走系数为R的高斯白噪声序列.将该噪声序列叠加到4个寻北位置的角速度输入理论值上,形成寻北仿真序列.每个位置采样时间设为60 s,共进行100次寻北.计算100次寻北结果的均方差值,作为当地理纬度为φ,被测方向的方位角为θ时,随机游走系数R对应的寻北精度σ.
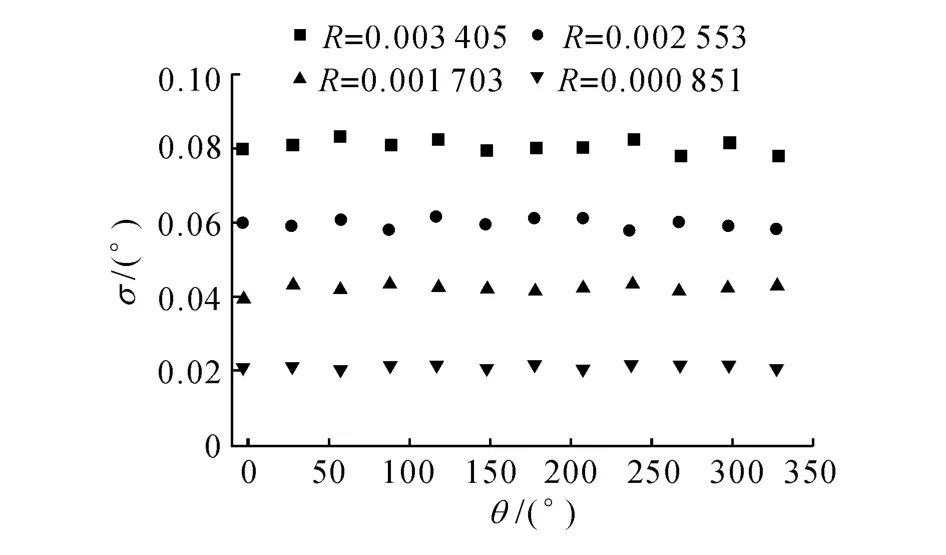
图2 当地理纬度为30°时噪声对应的寻北精度与方位角的关系Fig.2 Relationship between north-seeking precision caused by noise and azimuth when geographic latitude is 30°
固定φ和R,改变θ,可以评估噪声在不同方位角下对寻北精度的影响,如图2所示.随机游走系数越大,则对应的寻北精度越差,但在不同方位角下,相同的随机游走系数对应的寻北精度数值相当.由此,可以简化方位角参数,在地理纬度为φ,随机游走系数为R时,在[0,360°)范围内取不同的方位角进行上述仿真计算,求出各方位角下的寻北结果均方差值,并计算它们的均方根值作为地理纬度φ下R所对应的寻北精度σ.
固定φ,改变R进行仿真计算,可以得到特定地理纬度下随机游走系数与寻北精度的对应关系,如图3所示.在[0,90°)范围内取不同的地理纬度,进行不同地理纬度下随机游走系数与寻北精度对应关系的仿真计算,可以得出结论如下:1)在固定的地理纬度下,寻北精度与随机游走系数成正比,比例系数记为C;2)C随地理纬度的增加而变大,如图4所示.
由仿真结论可知,降低光纤陀螺的随机游走系数可以等比例提高寻北精度,与式(3)的理论一致.
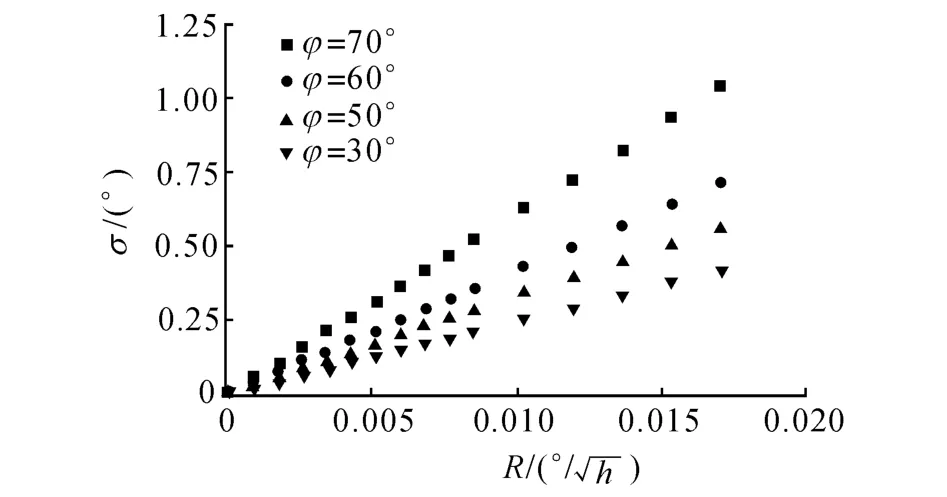
图3 特定地理纬度下寻北精度与随机游走系数的关系Fig.3 Relationship between north-seeking precision and RWC at specific geographic latitude
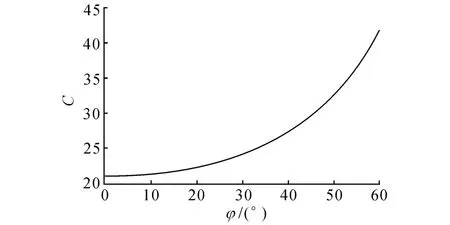
图4 比例系数与地理纬度的关系Fig.4 Relationship between proportion coefficient and geographic latitude
3 过调制技术原理
光纤陀螺测量噪声的来源主要包括散粒噪声、光源相对强度噪声和电子加性噪声等[7].
根据闭环干涉式光纤陀螺的基本原理,并考虑以上噪声源的影响,可以推导出光纤陀螺随机游走系数与噪声功率的关系:

式中:β为光纤陀螺中LiNbO3集成光学相位调制器的调制相位;PA、PB、PC以及P0分别为调制相位为π/2时的探测器信号功率、电子加性噪声功率、散粒噪声功率以及光源相对强度噪声功率.
由式(4)可以看出,在相同的硬件条件下,即探测器信号功率及各噪声功率一定的情况下,可以通过选取π/2~π的最佳调制相位,使得随机游走系数最小.鉴于传统闭环干涉式光纤陀螺采用π/2调制相位[8],此种方法称为过调制技术.
在传统π/2调制相位的前提下,为了降低随机游走系数,需要进行硬件上的升级和改善,如选用性能更优的光学器件、绕制更长的光纤环或者设计抑制光源强度噪声的电路,以提高系统的信号强度[9].如果采用过调制技术,则无须改变硬件状态,只须改变调制相位,即可提升性能.此外,过调制技术与硬件升级为相互独立的手段,可以叠加使用以获得更好的性能.
如式(4)所示,光纤陀螺的最佳调制相位与信号功率及各项噪声功率相关,因此,不同硬件状态的光纤陀螺的最佳调制相位以及使用过调制技术可以达到的最佳信噪比不同,实际应用时需要通过拟合测试方法得出特定光纤陀螺的最佳调制相位.已有研究表明:在现有硬件状态下,过调制技术最高可以将光学陀螺的随机游走系数优化至常规调制时的50%[10].
4 过调制光纤陀螺寻北精度验证
寻北精度验证实验的功能模块框图如图5所示.光纤陀螺安装在有北向基准的高精度位置转台上,输入轴垂直于转台转动轴.设当转台角位置为α时光纤陀螺输入轴与北向的夹角为θ0,分别在转台角为α、α+90°、α+180°和α+270°的4个位置采集光纤陀螺的输出Gi60 s,并取均值,记为G1、G2、G3和G4.按式(2)计算被测方向的方位角θ并计算寻北误差,在同一转台角位置进行7次寻北实验,在0~360°内取8个不同的转台角位置,共进行56次寻北实验,对所有56次寻北误差取均方根值,用于评价光纤陀螺的寻北精度.
使用4只光纤陀螺,分别在过调制前、后进行寻北精度验证,实验数据如表1所示.表中,Rb为过调制前的随机游走系数,σb为过调制前的寻北精度,Ra为过调制后的随机游走系数,σa为过调制后的寻北精度.
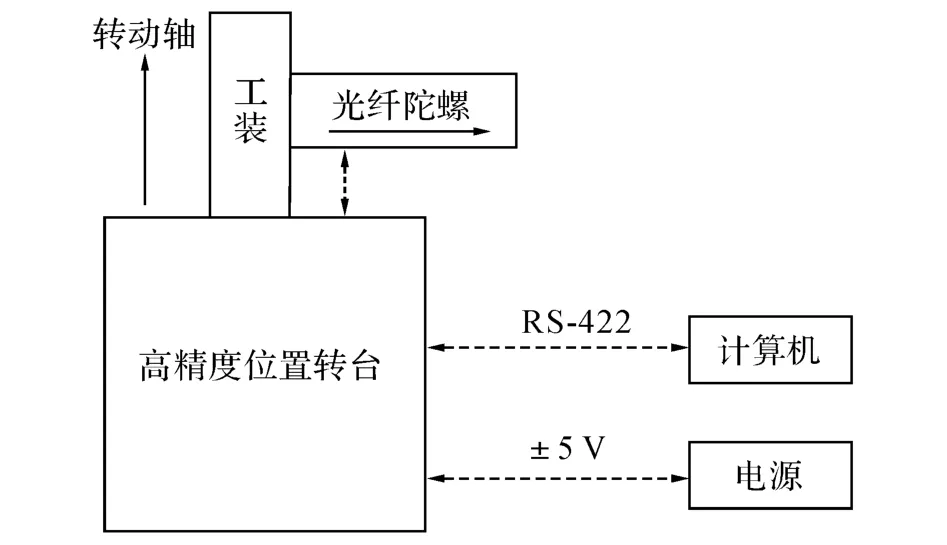
图5 寻北精度验证实验模块框图Fig.5 Function block diagram of north-seeking precision experiment
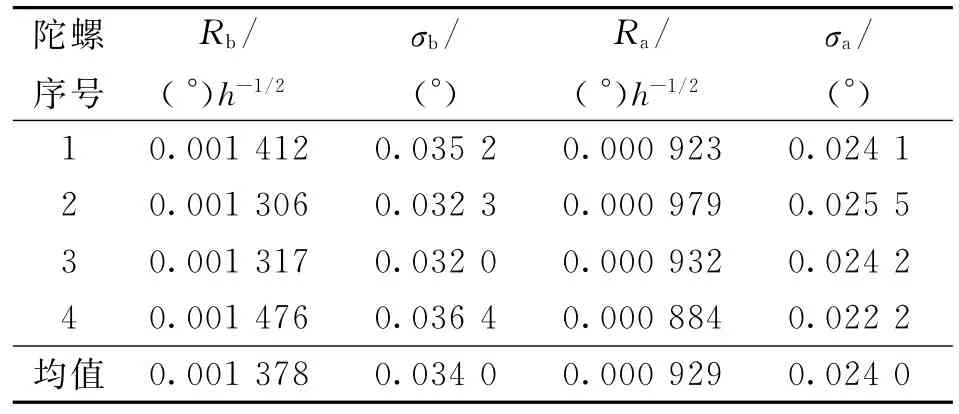
表1 寻北精度验证实验数据Tab.1 Data of north-seeking precision experiment
从实验结果可以得出如下结论:
1)过调制后,4只光纤陀螺的随机游走系数平均降低了32.54%,寻北精度平均提升了29.32%,寻北精度提升与随机游走系数降低的程度相当;
2)过调制后,4只光纤陀螺的寻北精度提升与随机游走系数降低的程度均相当,说明采用过调制技术提高光纤陀螺寻北精度的方法具有普适性.
5 结 语
采用过调制技术降低光纤陀螺随机游走系数可以等比例提高寻北精度,如将其应用于工程实践,能在不改变现有光纤陀螺硬件状态的基础上,有效提升光纤陀螺寻北仪的性能,具有较高的工程应用价值.此外,本文实验所采用的光纤陀螺过调制技术对其随机游走系数的优化效果与已有研究表明的最佳优化效果还存在差距,后续研究中可以通过对过调制参数的优化,进一步提升光纤陀螺的寻北性能.
(References):
[1]张志君,孙雾宇,武克用.光纤陀螺寻北仪样机设计及系统测试[J].测试技术学报,2007,21(2):130- 132.
ZHANG Zhi-jun,SUN Ji-yu,WU Ke-yong.Prototype design and system test of fiber optic gyroscope northfinder[J].Journal of Test and Measurement Technology,2007,21(2):130- 132.
[2]段苛苛.基于光纤陀螺的寻北系统关键技术研究[D].北京:北京交通大学,2014:4- 9.
DUAN Ke-ke.Study on the key technology of north seeking system based on fiber optic gyroscope[D].Beijing:Beijing Jiaotong University,2014:4- 9.
[3]顾宏,赵启大,杨功流.数字闭环光纤陀螺仪过调制技术研究[J].光电子·激光,2008,19(8):1035- 1038.
GU Hong,ZHAO Qi-da,YANG Gong-liu.Study of over modulation technique in the fiber optic gyroscope[J].Journal of Optoelectronics Laser,2008,19(8):1035- 1038.
[4]RUFIN P B.Progress in the development of gyropscope for use in tactical weapon systems[C]∥Proceedings of SPIE.California:SPIE,2000:2- 12.
[5]段苛苛,李邓化.粒子滤波在光纤陀螺四位置寻北中的应用研究[J].仪器仪表学报,2013,34(8):1749- 1755.
DUAN Ke-ke,LI Deng-hua.Study on the application of particle filtering in FOG four-position north-seeking[J].Chinese Journal of Scientific Instrument,2013,34(8):1749- 1755.
[6]宋凝芳,张中刚,李立京,等.光纤陀螺随机游走系数的分析研究[J].中国惯性技术学报,2004,12(4):34- 38.SONG Ning-fang,ZHANG Zhong-gang,LI Li-jing,et al.Random walk coefficient of fiber optic gyro[J].Journal of Chinese Inertial Technology,2004,12(4):34- 38.
[7]BURNS W K,MOELLER R P.Noise effect in high sensitivity fiber optic gyros[C]∥Proceedings of SPIE. Denver:SPIE,1996:380- 387.
[8]LEFEVRE H C.The fiber optic gyroscope[M].Boston-London:Artech House,1993.
[9]李绪友,张瑞鹏,吴磊,等.高精度光纤陀螺光源强度噪声的抑制[J].中国惯性技术学报,2010,18(5):600- 603.
LI Xu-you,ZHANG Rui-peng,WU Lei,et al.Suppression for light source intensity noise in high-precision FOG[J].Journal of Chinese Inertial Technology,2010,18(5):600- 603.
[10]汪樟海,陈杏藩.光纤陀螺随机游走优化技术[J].浙江大学学报:工学版,2013,47(3):554- 557.
WANG Zhang-hai,CHEN Xing-fan.Optimization of random walk coefficient of fiber optic gyroscope[J].Journal of Zhejiang University:Engineering Science,2013,47(3):554- 557.
Application of over modulation technique in fiber optic gyroscope north-seeking
ZHOU Yi-lan
(College of Optical Science and Engineering,Zhejiang University,Hangzhou 310027,China)
The scheme of improving the north-seeking precision of fiber optic gyroscope(FOG)by over modulation technique was proposed in view of the problem that the north-seeking precision of FOG is limited by measurement noise.Take 4-position north-seeking method for example,the results of theoretical and numerical simulation analysis show that the FOG's north-seeking deviation is proportional to the random walking coefficient(RWC).When the RWC decreases,the north-seeking precision of FOG can be promoted by equal proportion.The over modulation technique can optimize the signal-to-noise ratio of FOG by choosing the optimum modulation phase and can reduce the FOG's RWC effectively.North-seeking tests were carried out before and after over modulation,the results showed that after the over modulate,the reduction of RWC was about 30%and corresponded to the promotion of north-seeking precision.The results of tests conform to the theoretical analysis and calculation results,which illustrates that north-seeking precision of FOG can be effectively improved by the over modulation technique.
fiber optic gyroscope(FOG);north-seeking;4-position;over modulation;optimum modulation phase;random walking coefficient(RWC)
10.3785/j.issn.1008-973X.2015.09.028
V 241.5
A
1008- 973X(2015)09- 1817- 04
2015- 01- 23. 浙江大学学报(工学版)网址:www.journals.zju.edu.cn/eng
周一览(1978-),男,工程师,博士,从事光纤传感器及其系统研究.ORCID:0000-0001-6124-9692.E-mail:naliyuohz@zju.edu.cn
猜你喜欢
结构工程师(2022年2期)2022-07-15
家庭影院技术(2020年1期)2020-06-24
空间科学学报(2020年4期)2020-04-22
小学生学习指导(低年级)(2019年10期)2019-10-16
家庭影院技术(2019年4期)2019-04-17
学生天地(2019年6期)2019-03-07
军事文摘(2018年24期)2018-12-26
家庭影院技术(2018年9期)2018-11-02
现代计算机(2018年19期)2018-08-01
快乐语文(2018年36期)2018-03-12