
基于微颤振的机翼早期微小故障检测方法研究*
2015-10-22 07:32余臻谢南杰刘利军
自动化与信息工程 2015年6期
余臻 谢南杰 刘利军
(厦门大学自动化系)
基于微颤振的机翼早期微小故障检测方法研究*
余臻谢南杰刘利军
(厦门大学自动化系)
为预防和减少飞行事故,机翼的早期微小故障检测对提高系统的可靠性和安全性有重要的意义。针对离线检测方法无法及时检测早期的微小故障,提出了基于微颤振的机翼早期微小故障检测方法。该方法通过调整飞行速度,使机翼处于微颤振,增大机翼振动幅值,从而放大微小故障,实现机翼的早期故障检测。利用二维俯仰-扑动装置仿真模型,仿真结果表明,基于微颤振的故障检测方法能检测出机翼故障情况与正常情况的微小差异。
早期微小故障;故障检测;机翼微颤振;频域分析
0 引言
近年来时有发生的飞行事故多与飞机的控制失效有关,其故障形式主要是机体(机身、机翼和尾翼)和操纵面故障,如卡死、松浮、损伤等故障,从而影响飞机器的飞行性能[1]。大多数规模较大的故障是由早期微小故障引起的,早期微小故障检测尤为重要。
机翼早期微小故障有两方面的含义:其一是指处于早期阶段的故障、微弱故障或潜在故障,症状不明显;其二是从物理意义上讲,某一故障是另一故障的早期阶段。若这类故障若不能被检测,并得到及时处理,将会引起严重的事故[2]。因此,机翼早期微小故障的检测是预防和减少飞行事故发生的关键,可提高系统的可靠性和安全性。
随着技术的发展,出现了多种机翼结构故障检测识别方法,如目测法、超声波无损检测法,但这2种方法无法实现在线检测;又如基于模态应变能方法[3]、基于结构振动响应方法[4]和基于Lamb波方法[5]等,这几种方法在大多数情况下效果理想,但存在测量点多、测量数据丰富的局限性。在机翼故障数据获取不充分时,上述方法难以检测机翼早期微小故障。
本文提出基于微颤振的机翼早期微小故障检测方法,充分利用故障对机翼的激励和影响。该方法通过调整飞行速度使机翼处于微颤振,增大机翼振动幅值,从而放大微小故障实现机翼的早期故障检测。
1 二维气动弹性系统模型
本文以二维俯仰-扑动装置模型为研究对象,二维机翼模型[6]如图1所示。机翼根部2个转动弹簧分别提供扑动(h)和俯仰()θ2个自由度运动,弹簧的刚度分别为Kθ和Kh,这2个自由度之间无刚度耦合。在二维机翼模型中,可通过扰流片(即δ自由度)实现对颤振的抑制控制。
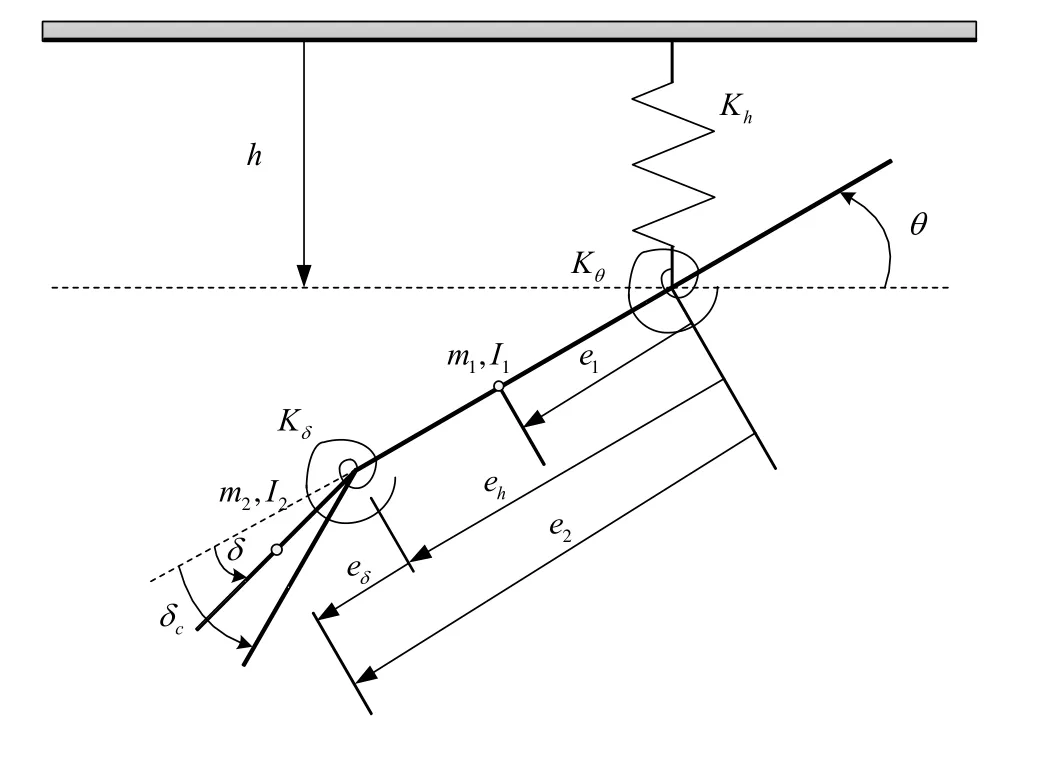
图1 二维机翼模型
二维机翼的数学模型引用文献[7]推导所得的二维气动弹性扰动方程:
用数值形式替代式(1)中的每个参数,其中大部分参数值由实验数据所得,小部分由空气动力学数值计算分析得到,更多详细的参数值及表达式参考文献[6]。根据式(1)及参数值,得到机翼的仿真模型。
2 故障检测方案设计
当飞行器在气流中以一定速度运动时,机翼等弹性体结构在气动力、弹性力和惯性力的相互耦合作用下,维持其自身的等幅振荡现象称为机翼颤振[8-10]。当机翼处于微颤振状态时,振幅增大,有利于微小信号的检测。因此,可以通过机翼微颤振增大振幅这个特点,实现机翼的早期微小故障检测。
故障检测方案设计目标:当机翼刚度发生早期微小故障时,能检测出与正常情况的微小差异。
2.1机理分析
当机翼系统发生颤振时,在翼面上有激励和阻尼2种作用形式的气动力,即颤振发生时,存在能量的输入与耗散。机翼系统表现为3种运动情况:1) 耗散能大于输入能,振动幅值逐渐减小直至振动最终消失,此时系统是动力稳定的;2) 耗散能小于输入能,振动幅值逐渐扩大,导致机翼结构损坏,此时系统是动力不稳定的;3) 耗散能等于输入能,振动幅值保持不变,呈现等幅简谐振动,此时系统处于临界颤振状态[11]。
对机翼来说,当飞行速度较小时,振动将快速衰减;当飞行速度增加时,衰减速率会降低,直到飞行速度达到某一值时,扰动引起的振动维持等幅简谐振动,该状态下的速度被称为临界颤振速度,简称颤振速度,此时系统的振动频率称为颤振频率[10]。
影响机翼颤振的因素有很多,如机翼的扑动和俯仰的刚度、机翼重心及焦点的位置、机翼升力面上的集中质量和飞行器的飞行高度等[11]。本文主要研究机翼俯仰刚度和飞行速度对机翼颤振的影响。
2.2故障特征
对于二维机翼模型,当机翼发生颤振时,同时有扑动和俯仰2个自由度。2个自由度振动的频率和振幅,由系统本身的物理参数及气动参数确定,与初始条件无关。当选定系统模型,改变系统的物理参数及气动参数,可以得到不同的频率和幅值,因此这2个特征量可以作为故障检测的故障特征。
调整飞行速度,即马赫数Ma,使飞行速度逐渐增大,在一定的速度范围,使机翼处于微颤振状态。由仿真模型,可以得到2个自由度的时域振动波形,但时域信号波形较难进行量化。因此,采取频域方法对时域信号进行截取、采样及傅里叶变换,得到2个自由度的幅值最大值及对应的微颤振频率,分别为由理论计算和风洞实验证明[11],当单独分析扑动和俯仰刚度对颤振速度的影响时,俯仰刚度的影响作用更加明显。因此,在不同的马赫数Ma下,减小俯仰刚度Kθ,保持扑动刚度Kh不变,仿真机翼早期微小的俯仰刚度故障,通过频域方法分别得到设计评价指标为
3 仿真结果分析
在上述的二维俯仰-扑动装置模型气动弹性系统中,可以通过扰流片对机翼颤振进行抑制控制。因此,从无扰流片颤振抑制开环控制和有扰流片颤振抑制闭环控制2方面进行仿真。
3.1开环控制
对于开环控制,系统的输入量为飞行速度马赫数Ma和飞行高度,被控对象为机翼模型,被控量为机翼的俯仰角度θ(t)及扑动高度h( t)。系统的初始状态为:h=0 m,θ=0º,飞行高度H=889 m ,并保持飞行高度不变,研究飞行速度对颤振的影响。
对机翼正常情况进行模型仿真时,设定模型仿真时间为10 s,并截取t=[4,5],得到俯仰和扑动的时域信号振动波形。通过实验仿真可以得到,当马赫数Ma=[0.628,0.640]时机翼处于微颤振状态;当Ma>0.640,振动幅值逐渐扩大,系统动力不稳定。在Ma=0.628,俯仰刚度正常值Kθ=4068 Nm时,俯仰角度θ(t)/deg和扑动高度h( t)/m时域振动波形如图2、图3所示。
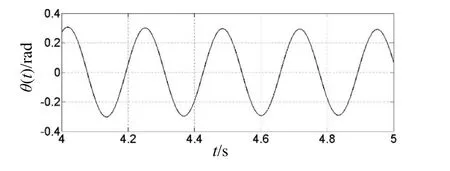
图2 俯仰角度时域振动波形
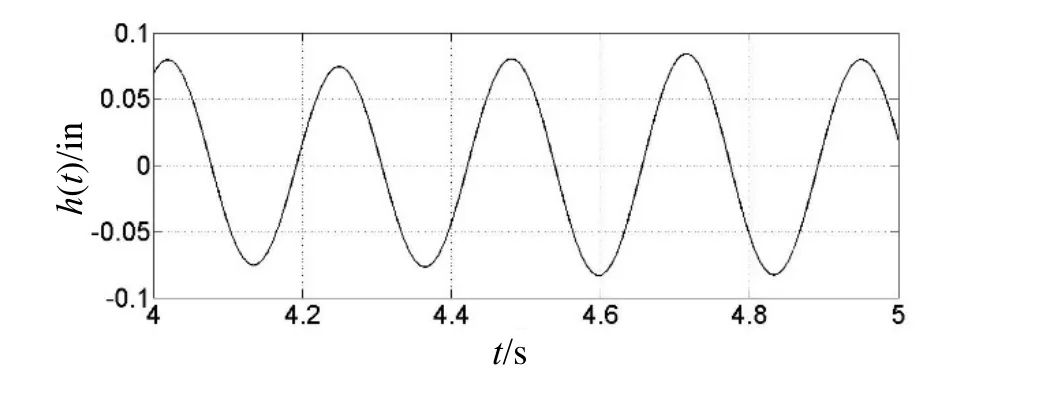
图3 扑动高度时域振动波形
对上述信号进行傅里叶变换,采样频率为fz=50 Hz,白噪声为信号幅值的5%。从而得到θ(t)和h( t)的单边振幅频谱,如图4、图5所示。

图4 θ(t)的单边振幅频谱
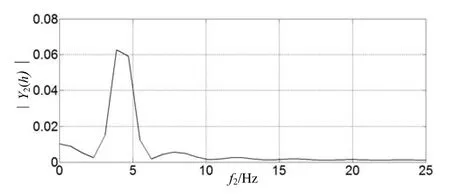
图5 h( t)的单边振幅频谱
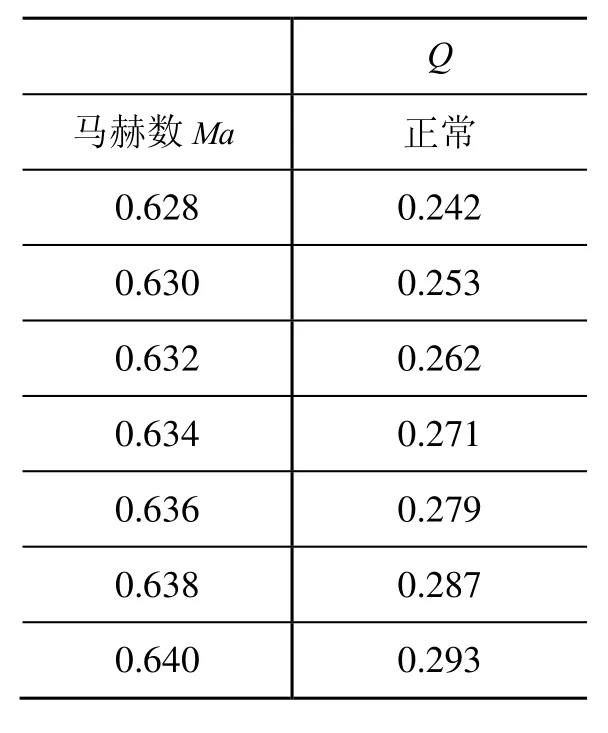
表1 正常情况下Q的值
为仿真机翼操纵机构存在疲劳、结构变化、腐蚀、裂痕等造成的机翼刚度早期微小故障,设置机翼俯仰刚度故障情况分别为:在不同马赫数下,同理进行截取、采样及傅里叶变换得到计算对应不同的故障情况,得到的评价指标Q的值,如表2所示。
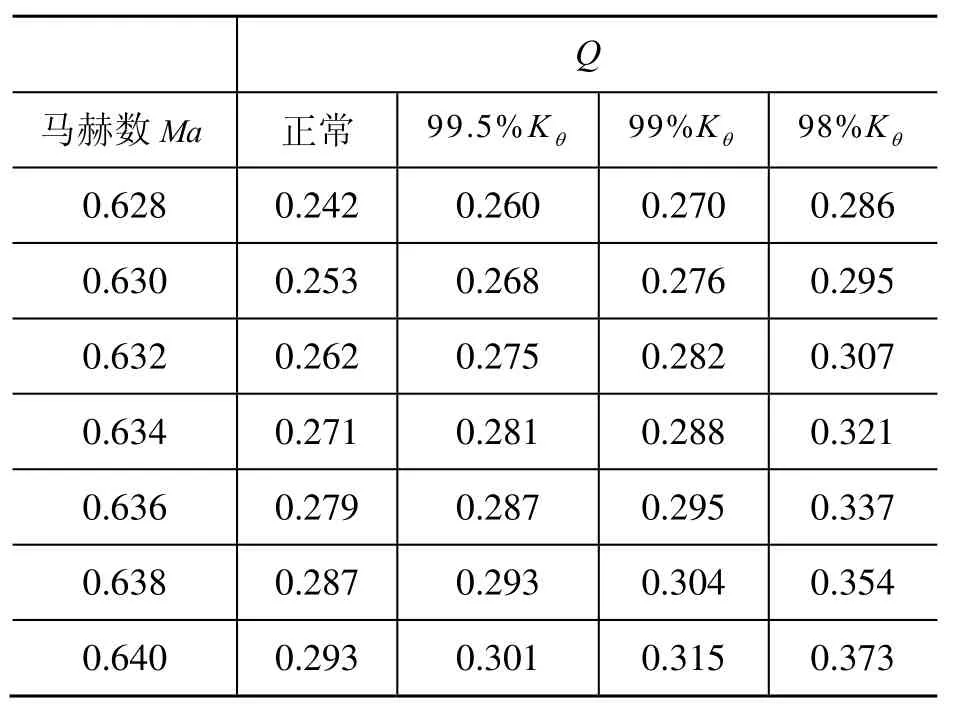
表2 开环控制下评价指标Q的值
在开环控制下,绘制在不同马赫数对应不同故障情况下评价指标Q值的折线图,如图6所示。

图6 开环控制下评价指标Q值折线图
在开环控制下,由Q值的变换曲线可以看出,在不同马赫数Ma使机翼模型微颤振状态下,能检测出机翼不同程度刚度的早期微小故障。
3.2闭环控制
在闭环控制中,系统的初始状态为h=0 m,θ=0º,目标给定值h=0 m,θ=0º。被控对象为机翼模型,被控量为机翼的俯仰角度θ(t)及扑动高度h( t)。颤振抑制的控制器传递函数为

通过实验仿真,当马赫数Ma=[1.223,1.229]时机翼处于近颤振状态;当马赫数Ma>1.229时,振动幅值逐渐扩大,系统动力不稳定。与开环控制处理方式相同,同理可得进而得到评价指标在闭环控制下,机翼在马赫数范围内对应不同故障情况下评价指标Q的值如表3所示。

表 3 闭环控制下评价指标Q的值
在闭环控制下,绘制在不同马赫数对应不同故障情况下评价指标Q值的折线图,如图7所示。
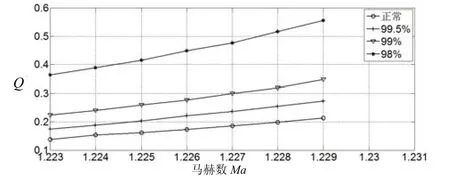
图7 闭环控制下评价指标Q值折线图
在闭环控制下,由Q值的变换曲线可以看出,在不同马赫数Ma使机翼模型微颤振状态下,能检测出机翼不同程度刚度的早期微小故障。
4 结语
本文以飞机的机翼二维俯仰-扑动装置模型为研究对象,提出基于微颤振的机翼早期微小故障检测方法,提取同故障相联系的特征量-评价指标Q,并研究了机翼刚度故障程度与该故障特征量的关系。仿真结果表明,随着俯仰刚度故障程度的增加,评价指标Q值也相应地增加,从而实现机翼的早期微小故障检测。基于微颤振的机翼早期故障检测方法的优势是数据测量时间短、数据量小和易于工程实现,且具有在线检测极其微小故障的能力。本实验室目前建立了一套机翼振动仿真实验系统,正在研究和测试该方法的有效性。
[1] 刘小雄,孙逊,唐强,等.飞机机翼故障的动态飞行包线估算方法[J].北京航空航天大学学报,2013,39(11):1515-1519.
[2] 李娟,周东华,司小胜,等.微小故障诊断方法综述[J].控制理论与应用,2012,29(12):1517-1529.
[3] 万小朋,施晓良,赵美英,等.模态应变能在复合材料机翼结构损伤检测中的应用[J].机械强度,2005,27(5):691-695.
[4] 陈换过,闫云聚,姜节胜,等.基于振动响应和HHT技术的机翼盒段结构损伤检测方法研究[J].应用力学学报,2007,24(3): 420-424.
[5] 张利绍.基于Lamb波的机翼蒙皮结构损伤检测技术研究[D].杭州:浙江理工大学,2011.
[6] Waszak M R. Modeling the benchmark active control technology wind-tunnel model for application to flutter suppression [J]. AIAA, 1996, 3437.
[7] 王囡囡.二元机翼颤振及其主动控制的研究[D].徐州:中国矿业大学,2013.
[8] Livne E. Future of airplane aeroelasticity [J]. Journal of Aircraft, 2012, 40(6): 1066-1092.
[9] Bisplinghoff R L, Ashley H. Principles of aeroelasticity [M]. Courier Dover Publications, 1962.[10] Fung Y C. An Introduction to the Theory of Aeroelasticity John Wiley and Sons [J]. New York, 1955.
[11] 陈桂彬,邹丛青,杨超.气动弹性设计基础[M].北京:北京航空航天大学出版社,2004.
Research on the Incipient Fault Detection Method for an Airfoil Based on Near Flutter Analysis
Yu ZhenXie NanjieLiu Lijun
(Department of Automation, Xiamen University)
On the problem of preventing and reducing flight accidents, the incipient faults detection for an airfoil has important significance of enhancing the safety and reliability of aircrafts. Because offline detection approaches cannot detect small incipient faults in time, a new online frequency domain analysis method based on near flutter analysis of an airfoil is proposed. Near flutter of an airfoil can be obtained by changing the speed of an airfoil through this approach. The airfoil vibration will increase due to the near flutter, so the small incipient faults detection can be accomplished by amplifying the small faults. So a simulation model for two-dimensional pitch and plunge apparatus is built to verify the fault detection method. Finally, the simulation results show this method can detect a slight difference between fault conditions and the normal condition.
Small Incipient Faults; Fault Detection; Airfoil Near Flutter; Frequency Domain Analysis
余臻,男,1964年生,教授,主要研究方向:工业自动化、电力系统自动化。E-mail: yuzhen20@xmu.edu.cn
国家自然科学青年基金(61304110, 2015年61301008);航空科学基金(20140768003)。
谢南杰,男,1990年生,硕士研究生,主要研究方向:CFT算法。E-mail:1104919275@qq.com
猜你喜欢
北京航空航天大学学报(2022年5期)2022-06-06
科学技术与工程(2020年30期)2020-12-04
北京航空航天大学学报(2020年10期)2020-11-14
燃气轮机技术(2020年3期)2020-10-26
电子制作(2018年11期)2018-08-04
北京航空航天大学学报(2017年6期)2017-11-23
电脑知识与技术(2016年18期)2016-11-02
大学教育(2016年7期)2016-07-27
航空学报(2015年4期)2015-05-07
实验流体力学(2013年2期)2013-09-21
