快速路入口匝道无模型自适应控制及ARM实现
2015-10-21 19:35郭代银鲁兴举金尚泰
森林工程 2015年1期
关键词:快速路
郭代银 鲁兴举 金尚泰

摘要:针对快速路系统复杂时变和难于建立精确数学模型的特点,提出基于无模型自适应控制的入口匝道控制方案,控制方案包括控制算法、参数估计算法和参数重置算法。该方案的设计无需精确的数学模型,只依赖于受控对象的实测数据。从而设计并开发了相应的入口匝道控制系统,主要包括上位机、基于高级精简指令集机器(Advanced RISC Machines,ARM)的入口匝道控制器、检测器 和信号灯。为了验证基于无模型自适应控制的入口匝道控制系统的有效性,利用基于微观交通仿真软件(Parallel microscopic simulator,PARAMICS)的仿真机模拟北京市北四环西路快速路网,生成相应的检测数据发送给入口匝道控制器并接收入口匝道控制器的控制信号实现快速路网的实时控制。实验结果表明,开发的基于无模型自适应控制的入口匝道控制系统具有良好的控制效果。
关键词:快速路;匝道控制器;自适应控制;PARAMCS
中图分类号:S 773.6文献标识码:A文章编号:1001-005X(2015)01-0097-06
Modelfree Adaptive Control for Urban
Freeway Onramp and Implementation with ARM
Guo Daiyin1,2,Lu Xingju1,Jin Shangtai2
(1.College of Mechatronic Engineering and Automation,National University of Defense Technology,Changsha 410073;
2.Advanced Control Systems Laboratory,School of Electronic and Information Engineering,
Beijing Jiaotong University,Beijing 100044)
Abstract:Considering the complex timevarying urban freeway traffic system,which is difficult to establish an accurate mathematical model,an onramp control scheme is designed based on model free adaptive control(MFAC)in this paper.The designed control scheme includes control algorithm,parameter estimation algorithm and parameter reset algorithm.The control scheme design does not need a precise mathematical model,which only depends on the realtime measured data of the controlled object.Furthermore,a corresponding onramp control system is designed and developed,which includes PC,onramp controller based on ARM,detector and lights.In order to verify the validity of the MFAC based onramp control system,the software simulator based on PARAMICS is used to simulate the North Fourth Ring Road in Beijing fast road network,generate the detecting data which is sent to the onramp controller,and receive the control signal sent by onramp controller to realize the realtime control of the fast road network.The experimental results show that the developed MFAC based onramp control system has good control effect.
Keywords: urban freeway;ramp controller;model free adaptive control;PARAMICS
收稿日期:2014-06-05
基金項目:国家自然科学基金资助项目(61120106009);中央高校基本科研业务费(2014JBM005)
第一作者简介:郭代银,硕士,研究员。研究方向:无模型自适应控制、智能交通系统等。Email:guodaiyin@gmail.com
引文格式:郭代银,鲁兴举,金尚泰.快速路入口匝道无模型自适应控制及ARM实现[J].森林工程,2015,31(1):97-102.近年来,我国汽车保有量急剧增多,大量的车辆涌入快速路,导致快速路交通严重阻塞。而交通阻塞将带来燃料消耗增加、空气污染加剧等一系列问题[1-2]。车辆拥堵已经成为了城市发展的一个巨大障碍,而快速路作为城市道路交通的主要承担者,它的交通状况将决定整个城市的交通状态。有效的交通控制可以缓解快速路交通压力,实现城市交通的顺畅。
快速路交通系统的控制方法一般分为入口匝道控制、主线控制和通道控制,其中,入口匝道控制是最常用也是最有效的控制方法[3]。入口匝道控制是通过在匝道入口处设置交通信号灯,调节进入快速路的车流量,使得快速路上的交通流密度维持在一个期望的水平,从而可以避免和预防交通流的常发性拥堵和部分偶发性拥堵。
从系统控制的观点来看,入口匝道控制是典型的调节问题,许多现有的控制方法都可以应用,如数学规划方法[4]、线性二次性调节器[5]、PI控制器[6]、最优控制理论[7]等。目前应用最广泛的是M.Papageorgiou提出的ALINEA控制方法[8-9]。文献[10]提出了基于单点动态控制的ALINEA方法在快速路的应用,文献[11]提出了综合匝道排队长度的ALINEA控制方法,并以上海武夷路为模型进行了仿真。然而ALINEA是属于PI控制器,它对于具有强非线性、时变、结构和参数不确定的快速路系统控制效果不是太理想。
无模型自适应控制算法的优势在于控制器设计只依赖受控对象的实时测量数据,不需要知道受控系统的数学模型、阶数、时滞以及先验知识;不需要外部测试信号,也不需要训练过程;算法结构简单、容易实现、计算负担小,并且具有较强的鲁棒性;在一些假设前提下,基于偏格式线性化的无模型自适应控制和基于紧格式线性化的无模型自适应控制方案的稳定性和收敛性已得到了证明[12-14];无模型自适应控制在实际的工业控制中也得到了广泛的应用[15-16]。针对快速路系统复杂时变和难于建立精确数学模型的特点,本文设计了基于无模型自适应控制的快速路入口匝道控制方案。主要设计思路是:首先将非线性的快速路系统等效地转化为动态线性化数据模型,然后基于优化指标设计控制算法,最后利用系统的输入数据(入口匝道流量)和输出数据(快速路交通密度)通过投影算法估计数据模型和控制算法中的伪偏导数。
本文设计并开发了基于无模型自适应控制的入口匝道控制系统,主要包括上位机、基于ARM的入口匝道控制器、检测器和信号灯,并利用基于PARAMICS的仿真机来模拟北京北四环西路的交通状况,通过控制系统与PARAMICS仿真试验,验证所设计的入口匝道控制系统的有效性。
第1期郭代银等:快速路入口匝道无模型自適应控制及ARM实现
森林工程第31卷
1快速路控制原理
根据M.Papageorgiou提出的快速路交通流模型[8-9],将快速路分割成个路段,每个路段只有一个入口匝道和出口匝道,第1个路段划分示意图如图1所示。
图1快速路路段划分示意图
Fig.1 Freeway segment subdivided into sections
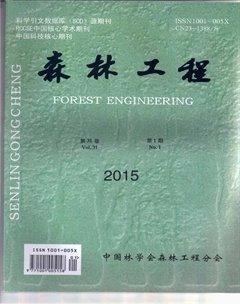
具体的交通流模型如下:
ρi(k+1)=ρi(k)+TLi[qi-1(k)-qi(k)+ri(k)si(k)]。(1)
qi(k)=ρi(k)vi(k)。(2)
vi(+1)=vi(k)+Tτ[V(ρi(k))-vi(k)]+
TLivi(k)[vi-1(k)-vi(k)]-
vT[ρi+1(k)-ρi(k)]τLi[ρi(k)+κ]。(3)
V(ρi(k))=vfree1-ρi(k)ρjamlm。(4)
式中:ρ(k)为路段i第k个时段的平均密度,辆/车道/km;vi(k)为路段i第k个时段的平均速度,km/h;qi(k)为k时段从i到i+1路段流量,辆/h;ri(k)为k时刻从入口匝道进入路段i的流量,辆/h;si(k)k为时段从出口匝道流出路段i的流量,辆/h;Li为路段的i长度,km;T是采样周期,h;vfrec和ρjam分别表示自由流速度和单个车道的最大可能密度,τ,γ,κ,l,m是常数,反应特定交通系统的道路几何特点、车辆特征、驾驶员行为等。
从系统控制的角度来看,可以通过调节入口匝道进入路段的车流量来控制入口匝道所在路段的交通流密度,消除路段的拥堵现象使其达到预定值,同时增大道路的有效利用率。基于以上考虑,入口匝道的车流量ri可以认为是交通流系统的控制输入信号,而该路段的交通流密度ρi是交通流系统的输出信号,si为整个系统的外部扰动。
由于交通流模型的强非线性和不确定性,即使在模型完全已知的情况下,应用最优控制或者自适应控制等方法设计合理的输入也是很困难的。针对交通流模型强非线性和不确定性大的特点,本文设计了一种快速路系统的基于紧格式动态线性化的无模型自适应控制(compact form dynamic linearization based model free adaptive control,CFDLMFAC)入口匝道控制方案。
首先把宏观交通流模型转换为如下格式:
ρi(k+1)=ρi(k)+TLi[qi-1(k)-
qi(k)+ri(k)-si(k)]=(1-TLivi(k))ρi(k)
+TLivi-1(k)ρi-1(k)+TLiri(k)-TLisi(k)。(5)
简便起见,记ai(k)=1-TLivi(k),bi(k)=TL1vi-1(k),ci(k)=TL,则公式(5)可简化为:
ρi(k+1)=ai(k)ρi(k)+bi(k)ρi -1(k)
+ci(k)ri(k)-ci(k)si(k) 。(6)
系统满足文献[17]中给出的紧格式动态线性化方法的基本假设条件,即宏观交通流模型在任意紧集上对于所有变量都是连续可微的[18-19];有限车流量的变化也不会引起交通流密度的无限增加。因此,宏观交通流模型可等效转换为CFDL数据模型:
Δρi(k+1)=φi,c(k)Δri(k)。(7)
其中,Δρi(k+1)=ρi(k+1)-ρi(k)、Δri(k)=ri(k)-ri(k-1)。
给定期望密度ρi,d(k)情况下,相应的CFDLMFAC方案设计如下[19]:
φ^i,c(k)=φ^i,c(k-1)+ηΔri(k-1)μ+|Δri(k-1)|2×
[ρ1(k)-ρi(k-1)-φ^i,c(k-1)Δri(k-1)]。(8)
φ^i,c(k)=φ^(1),若|φ^i,c(k)|≤ε或|Δri(k-1)|≤ε sign(φ^i,c(k))≠sign(φ^i,c(1)),
则:ri(k)=ri(k-1)+ξφ^i,c(k)[ρid(+1)-ρi(k)]λ+|φ^i,c(k)|2。(9)
式中:φ^i,c(1)为φ^i,c(k)的初始值;ρi(k)为测量的道路交通流密度;ri(k)为调节率;μ>0,λ>0,η∈(0,1],ξ∈(0,1];ε为一个充分小的正数。调节率可通过下式转换得到绿灯时间。
G=ri(k)·T/S。(11)
其中,T为控制周期,h;S为匝道正常状态下的通行能力,辆/h。
文献[12-14]已经给出了基于紧格式线性化的无模型自适应控制方案在离散非线性系统的稳定性和收敛性证明,限于篇幅,本文不作介绍。
2入口匝道控制系统设计
入口匝道控制系统结构图如图2所示,包括上位机、匝道控制器、检测器和信号灯。其中匝道控制器包括:网络通信模块、GPS校时模块、ARM处理器、RS232串口通信模块和220V交流继电器模块。
图2入口匝道控制系统结构图
Fig.2 The overall design scheme
上位机可以实时的监控道路交通状况、提取交通流数据、查询历史数据、发送控制信号及在线调节MFAC控制参数,它远离控制现场,方便操作人员使用;匝道控制器负责上位机指令接收、系统控制算法实现和检测信号接收及控制信号的发送,是系统的核心,在与上位机通信正常的情况下,入口匝道控制器可以随时接收上位机发送的相关控制指令:如根据上位机发送的控制参数控制入口匝道车流量,强制关闭匝道和全绿通行等,在与上位机通信中断的情况下,它仍然可以独立完成入口匝道的控制任务;检测器主要负责快速路交通流测量的任务,通过检测器,可以得到交通流密度、占有率、密度、车速等数据;信号灯是控制系统指令执行部分,主要负责入口匝道的放行与禁止,它受匝道控制器控制,匝道控制器将计算得到的控制时间通过通用输入输出接口(General Purpose Input Output,GPIO)输出的信号来控制220V交流继电器,通过交流继电器来驱动红绿信号灯。
系统工作流程为:检测器将检测的信息传输给匝道控制器;匝道控制器实时接收检测器信号及上位机信号,同时也实时的将道路信息上传给匝道控制器,通过对检测器信号的处理,运用控制算法得到绿灯时间,然后将控制信号发送给信号灯;上位机实时的接收匝道控制器发送的信息并刷新显示,监控人员可以根据实际道路交通状况,在线发送控制指令给匝道控制器。
2.1上位机
上位机软件中有监控模块、数据存储模块、控制参数修改模块、历史数据查询模块以及未來交通状况预测模块,监控模块可以实时的显示当前快速路的交通状况;数据存储模块存储入口匝道控制器上传的相关数据;控制参数修改模块可以实时修改入口匝道控制器的控制参数;历史数据查询模块可以查询历史交通流信息;交通流预测模块可以实现对未来一段时间内交通状况的预测。
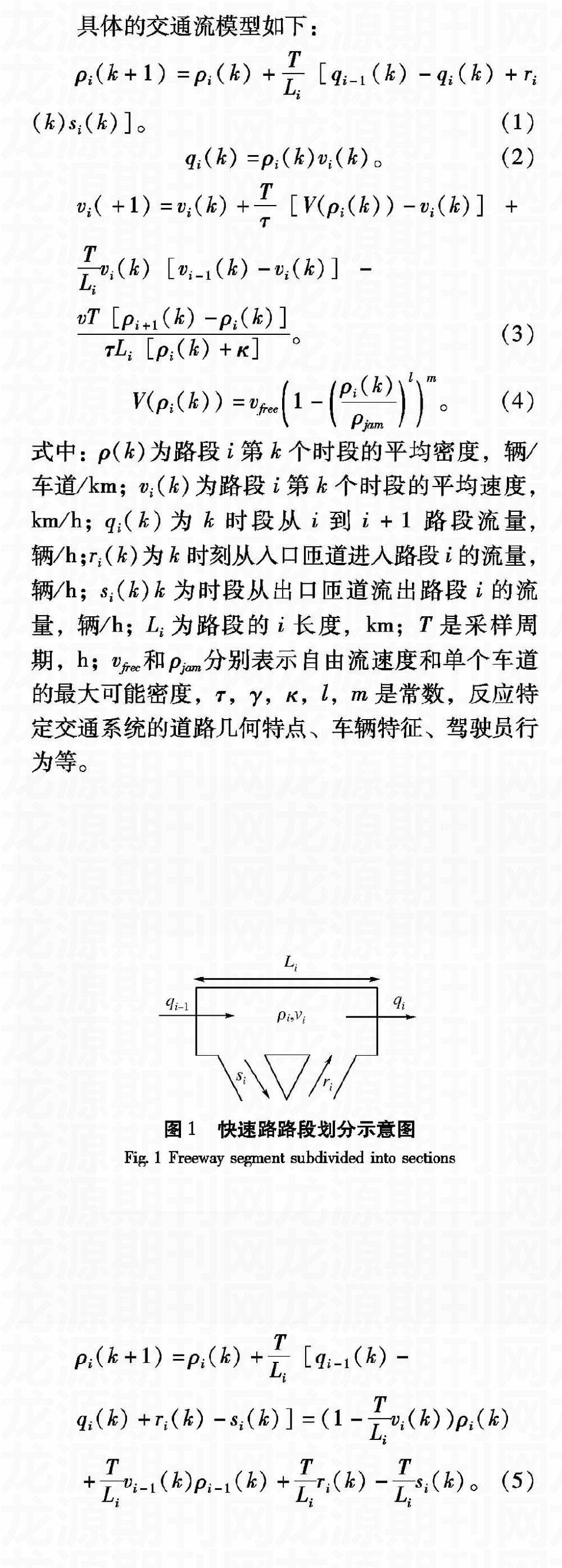
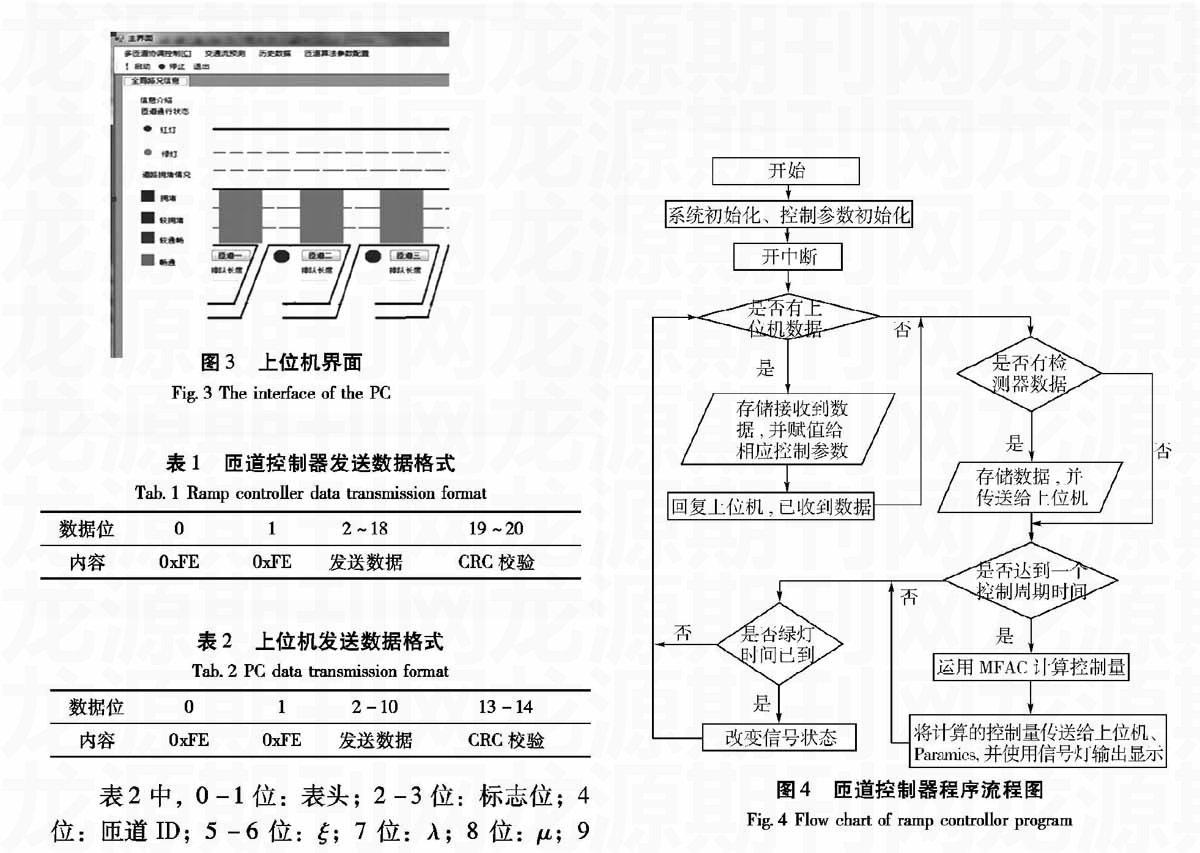
(1)上位机软件设计。上位机的主监控界面如图3所示,能实时显示道路的交通拥堵情况,匝道红绿灯状态;历史数据查询界面可以查询快速路的历史信息,历史数据包括:时间、占有率、主线车速、密度、流量、匝道排队长度、红绿灯状况、绿灯时间;匝道算法参数配置界面可以实现操作人员对控制算法参数的在线修改,当用户修改控制参数后,上位机将相关信息传输给匝道控制器,匝道控制器快速的修改相应MFAC控制参数。
图3上位机界面
Fig.3 The interface of the PC
(2)通信协议。上位机实时的与匝道控制器进行相关信息的传输。匝道控制器在接收到检测器发送的检测数据后,将信息转发给上位机;匝道控制器也会在每个控制周期开始时,将控制信息上传给上位机。当操作人员修改控制算法参数时,上位机将相关信息发送给匝道控制器,他们之间的通信采用网络传输方式,具体的通信格式见表1和表2。
表1匝道控制器发送数据格式
Tab.1 Ramp controller data transmission format
数据位012~1819~20内容0xFE0xFE发送数据CRC校验
表1中,0-1位:表头;2-3位:数据长度;4-5位:保留位;6位:匝道ID号;7-8位:主线车流密度;9位:匝道排队长度;10位:绿灯时间;11-16位:系统时间;17:标志位,1表示控制信号,0表示检测器数据信号;18位:主线流量;19-20位:CRC校验。
表2上位机发送数据格式
Tab.2 PC data transmission format
数据位012-1013-14内容0xFE0xFE发送数据CRC校验
表2中,0-1位:表头;2-3位:标志位;4位:匝道ID;5-6位:ξ;7位:λ;8位:μ;9位:η;10位:φi,c(1);11-12位:ρid;13-14位:CRC校验。
2.2入口匝道控制器
入口匝道控制器包括主控芯片、网络通信、串口通信、GPS校时等模块。主控芯片采用基于ARM ConexM3内核的STM32系列32位闪存微控制器,工作于-40℃至+105℃的温度范围,其内核电压为1.8V,芯片电压为3.3 V,可以选择睡眠模式、待机模式,保证低功耗应用的要求;相对于ARM系列其他芯片,STM32运行速度更快、易于开发、出众及创新的外设配置、丰富的通信接口可以多种方式通信;GPS校时模块,保证控制控制器时间信息与现实同步;RS-232通信模块用于与检测器的通信,保证检测数据的接收;网络通信模块采用DM9000,外加HR911105A插口,DM9000使用技术比较成熟,方便设计。
入口匝道控制器在初始化完成后,不断扫描通信接口,并实时、连续地给出控制信号。当接收到检测器信号时,进行判定,若是正确信号,则将其存储,并上传给上位机;当接收到上位机信号后,将其存储并赋值给相应的控制参数。系统采用40 s控制周期,在每个控制周期开始时,入口匝道控制器利用控制算法计算出控制量,把控制信息上传给上位机,并同时通过GPIO口输出来驱动信号灯。入口匝道控制算法流程如图4所示。
图4匝道控制器程序流程图
Fig.4 Flow chart of ramp controllor program2.3检测器
检测器主要功能是实现快速路交通流的测量,它包括检测线圈、信号发生器以及信号处理器。
信号发生器能同时连接四路检测线圈,信号发生器数据格式为“AA,ADDRESS,XX”,三字节方式,“AA”是引导码,ADDRESS是主机地址,XX表示线圈号,四路线圈号分别为0XCA,0XCB,0XCC,0XCD。信号处理器采用STC12C5A60S2单片机,其处理速度快、具有双串口优势、不同波特率的设置保证了通信的灵活、准确性。
当车辆通过检测线圈时,它能产生相应的脉冲信号,信号发生器通过感应线圈传送的脉冲信号产生相关的车辆通过信号,信号处理器通过对信号相关的处理,可以得到流量、密度、排队长度信息,并上传给入口匝道控制器,数据传输格式见表3。
表3检测器发送数据格式
Tab.3 Detector data transmission format
数据位012-345内容表头匝道ID交通流密度排队长度流量
单片机通过串口接收信号发生器信号,当单片机接收到信号发生器数据时先进行判断,若是线圈数据,则将其保存。单片机20 s计算一次交通流信息,若此次交通流信息和上一次变化超过一个范围,那么将此次计算的交通流密度進行处理,保证20 s时间内,交通流密度的变化幅度不会太大。具体的检测器程序流程图如图5所示。
具体的系统实物图如图6所示。
3实验验证
考虑将所设计的控制系统在实际道路进行实验验证时,需要现场安装设备,重新规划道路交通,成本比较昂贵。而 PARAMCS作为一款专门用于微观交通仿真的软件,可以模拟实际的道路交通,运用PARAMCS来替代实际的道路,通过与所设计的控制系统相连来验证系统的可行性,为我们避免了许多麻烦。
实验验证的关系框图如图7所示,采用PARAMICS替代所设计系统的检测器模块,由PARAMICS模拟的道路交通来提供交通流数据,匝道控制器除了将控制信号输出给红绿灯以外,还传输给PARAMICS,实现在PARAMICS中对模拟的入口匝道实时控制。
图5单片机程序流程图
Fig.5 MCU program flow chart
图6入口匝道控制系统实物图
Fig.6 The system hardware configuration
图7实验系统框图
Fig.7 Simulation verified diagram
实验验证以北京北四环西路8个匝道长度为目标对象,运用PARAMCS模型实际的道路交通,用设计的MFAC控制器对其中一个匝道口进行控制研究。其中路网主路是4车道,北京北四环西路车流量的高峰状态主路流量大约在5 500辆/h左右,匝道流量在1 800辆/h左右。图8为PARAMCS仿真一小时的数据经提取在MATLAB中所画的图形,其中虚线为没有控制的交通流密度,点划线为采用MFAC控制器的交通流密度,直线为期望交通流密度,可以看出,在使用匝道控制器后,道路的拥堵状况得到缓解,交通流密度的波动也没有因为车辆过多而迅速上升,保持在一个范围内,保证了快速路的畅通。
图8仿真结果
Fig.8 Simulation results
对仿真得到的两组数据进行RMS(方均根:指多个数的平方和然后再开方,在规定时间间隔内一个量的各瞬时值的平方的平均值的平方根,RMS=1N∑Nk=1(ρd(k)-ρi(k))2,N是是采样点个数,ρi(k)是各个时刻检测的交通流密度,ρd(k)是目标期望交通流密度)计算,得出数据如下:RMSMFAC为6.153 3,RMS无控制为13.289。从数据可以看出,基于MFAC控制的道路交通能够有效调节交通流密度,减小RMS值,达到良好的控制效果。
4结束语
本文设计并开发的基于无模型自适应控制的入口匝道控制系统,主要包括上位机、入口匝道控制器、检测器和信号灯等。基于PARAMCS的实验结果表明开发的入口匝道控制系统具有良好的控制效果。并且整个系统电路设计简单,调试容易,可移植性强。系统留有多个数据接口便于拓展开发,经过改造可以实现路网的控制,应用前景广阔。
【参考文献】
[1]Zheng J H,Dong D C.Modeling of optimal control for urban freeway corridor under incident conditions[J].Journal of Control Theory and Applications,2006,4(3):252-256.
[2]荆彬彬,林培群,徐建闽.基于Vissim的3相交通流理论应用[J].交通信息与安全,2013,4(31):108-112.
[3]Parageorgiou M,Kotsialos A.Freeway ramp metering:an overview[J].IEEE Transactions on Intelligent Transportation Systems,2002,3(4):271-278.
猜你喜欢
中国水运(2022年4期)2022-04-27
西部交通科技(2019年10期)2019-09-10
中小企业管理与科技·中旬刊(2017年11期)2017-12-14
科学与财富(2017年26期)2017-09-23
价值工程(2017年22期)2017-07-15
湖南大学学报·自然科学版(2017年3期)2017-04-14
现代商贸工业(2016年22期)2016-12-27
建材发展导向(2016年3期)2016-05-23
建筑工程技术与设计(2015年33期)2015-10-21