基于ARM的无刷直流电机控制系统的设计
2015-10-18 22:38王新彪俞建定宁波大学信息科学与工程学院浙江宁波315211
网络安全与数据管理 2015年16期
王新彪,俞建定,王 青(宁波大学 信息科学与工程学院,浙江 宁波 315211)
基于ARM的无刷直流电机控制系统的设计
王新彪,俞建定,王青
(宁波大学信息科学与工程学院,浙江宁波315211)
为了满足对无刷直流电机快速、平稳、准确调速的要求,设计了一种以Cortex_M3内核为平台的无刷直流电机(BLDC)控制系统,并实现了该控制系统的硬件及软件部分。运用操作系统FreeRTOS实时调度任务,采用速度、电流双PID控制算法,形成无刷电机的双环实时控制。为了更加有效地降低转矩脉动,实现了一种12扇区无磁链观测的二三导通模式直接转矩控制。试验结果证明,该控制系统响应速度快、调速范围广且精度高、性能稳定可靠、成本和功耗皆低,应用前景十分广泛。
直流无刷电机;直接转矩控制;PID算法;转矩脉动
0 引言
近些年来,随着控制理论及电子技术的迅速发展,无刷电机电子换相逐渐取代了传统的有刷直流电机的机械换相[1-2]。本文提出在中小功率的无刷电机的控制系统中采用ST公司以Cortex—M3为内核的STM32f103作为核心处理器,它自身带有反电动势检测功能,专门用于电机控制的外设,简化了外围电机控制系统的设计,使其成本大幅降低。
由于无刷直流电动机的控制技术仍不成熟,为降低转矩脉动,对转矩的控制成为了研究的新方向。传统直接转矩控制方法通过优选的电压矢量对电机定子磁链和转矩直接进行调节,实现了对电机转矩的直接控制[3-4]。在无刷直流电机直接转矩控制中,由于反电势为方波,常用的导通方式是120°导通方式,对应的空间电压矢量的选择与传统的电压矢量也不同[5]。为了更加有效地降低转矩脉动,本文实现一种12扇区无磁链观测的二三导通模式直接转矩控制[6]。
1 系统设计及工作原理
该控制系统主要包含输入保护电路、MOSFET驱动、模数转换、采样保持、电池充电检测、电子刹车、电流保护、通信模块。该控制系统结构如图1所示。

图1 控制系统总体结构图
系统工作原理及功能如下:使用FreeRTOS操作系统建立4个任务设定优先级:AD检测任务、串口通信任务、模式及速度控制任务、故障报警指示任务。AD检测任务每2ms执行一次,若有过流、长时间堵转或其他突发性故障,故障指示灯将报警并关断输出停止电机运行。若无上述故障,则处理器将根据人机界面通过串口发送来的信号进行解码,然后设置相应的转子速度及运行模式。根据定时器中断捕获到霍尔的变化,分析电机转子的位置,然后根据定子转动方向来控制功率管的开关顺序,控制电机的转动方向和速度[7]。
2 硬件设计
2.1STM32f103简介
STM32是32位处理器,工作频率高达72MHz,速度达120MIPS,内部集成多路高精度12位AD,6个普通定时器,两个16位高级定时器,每个可产生6路捕获/比较通道可输出6路互补PWM,还有刹车和死区控制,是一款专用电机控制芯片,不仅简化了外围电路设计,而且节省成本,结合实时操作系统FreeRTOS,更充分有效地运用了CPU资源,使各个任务实时快速响应,实现操作的快速灵活。
2.2电流采样及保护电路
在图2所示的电流采样及保护电路中,当电机带负载时,有时电流会达到几安培,为了处理器正常工作及采样,需要采用阻值小且精确、体积小的康铜丝作为采样电阻,电流信号经康铜丝采样之后分两路,分别送至放大器和比较器。放大器用来实时放大采样过来的电流信号,放大约20倍,放大后的信号提供给处理器进行AD采样转换,转换后的AD值不能超过规定值。另一路信号送至比较器,当电流由于某种原因大大超过允许值时,比较器翻转送出低电平,触发单片机的大电流中断,使单片机能够快速关断驱动,从而保护MOSFET避免受到更大的伤害[8-10]。

图2 电流采样及保护电路
2.3功率逆变驱动电路
如图3所示,功率逆变驱动电路中,功率开关器件采用隔离驱动方式将多路驱动电路、控制电路、主电路互相隔离,以免引起严重的后果。本系统采用美国IR公司生产的IR2101S,它具有独立的低端和高端输入通道;悬浮电源采用自举电路,逻辑电源电压范围大,为系统模块化的设计带来了方便,极大降低了开发成本,缩短了系统开发周期[11];快速恢复二极管Fr10和R39组成自举电路。

图3 功率逆变驱动电路
3 系统软件设计
3.1控制策略
将二二导式与三三导通模式相结合,得到新的二三导通模式,该导通模式共有12个电压矢量,电压矢量增加使60°扇区变为30°扇区,能有效地减小转矩脉动。在定子磁链和转矩控制方面,12个电压矢量的调节比6电压空间矢量更准确。12个电压矢量组合分成12个扇区,扇区划分如图4所示。二三导通划分扇区的方法和三三导通一样,二三导通是电压矢量的15°范围内作为一个扇区。
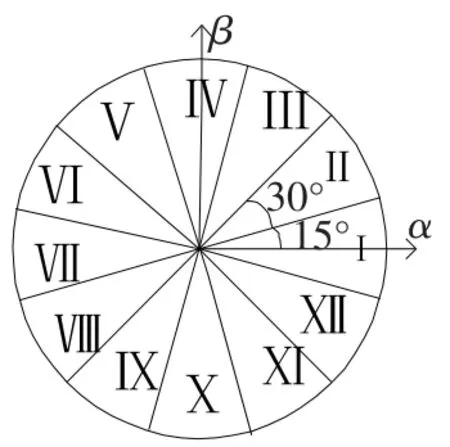
图4 扇区划分图
本文详细地分析了无磁链观测的无刷直流电动机直接转矩控制,得到转矩偏差的表达式为:

其中,p为极对数,Δφsq为定子交轴磁链变化量,Lq为电机交轴电感,φr为转子磁链,θe为转子相对于ɑ轴夹角。
由于转子转动时间常数远大于电气时间常数,当电压矢量起作用时,认为转子位置不变。在转子位置不变的情况下,dφr/dθe也保持不变,为迅速调节转矩偏差,应该选择交轴分量最大的电压矢量。近似地在保持定子磁链幅值不变的情况下,施加垂直于转子磁链方向的电压矢量,迅速补偿转矩偏差。以扇区Ⅰ为例,如图5所示,Ψr为转子磁链,V4与V10可近似地认为与30°扇区垂直。施加V4,增加转矩;施加V10,减小转矩。

图5 扇区Ⅰ中转子磁链与电压矢量
随着转子转动到不同的扇区,以此规律,得到最优电压矢量选择表,如表1所示。
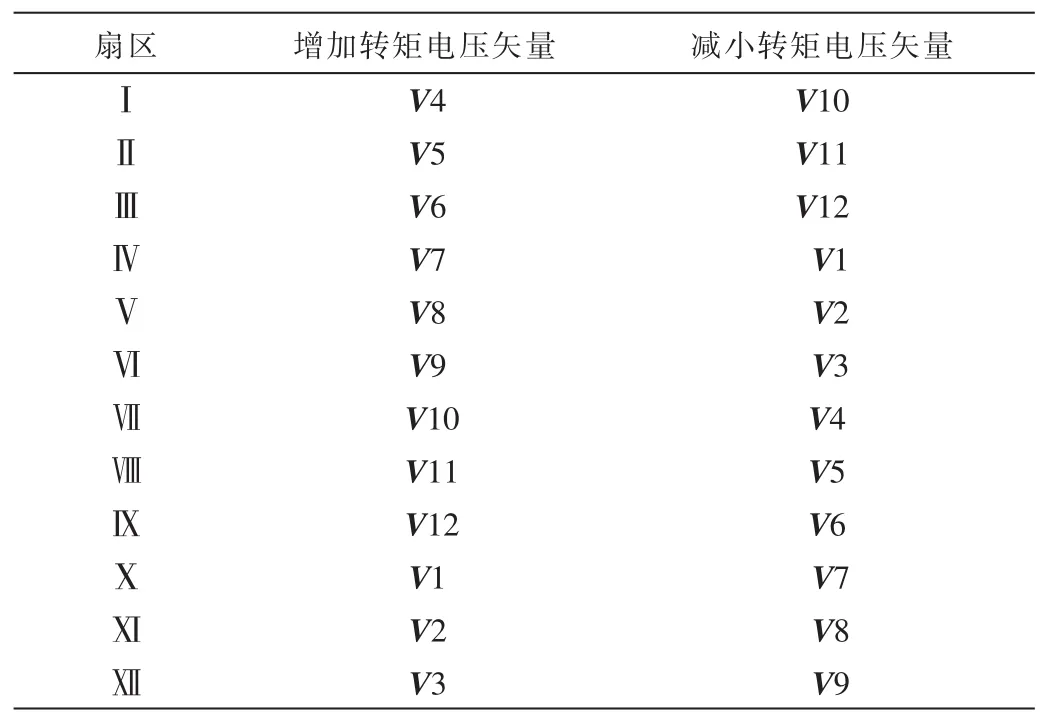
表1 电压矢量选择表
无刷直流电机无磁链观测直接转矩控制框图如图6所示。
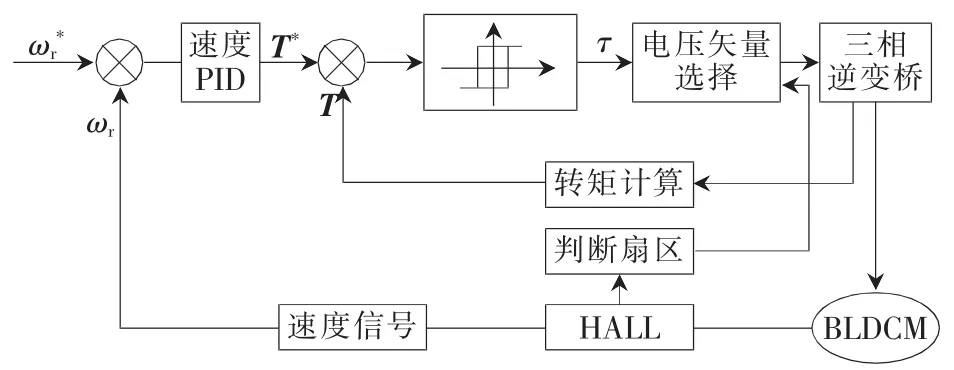
图6 直接转矩控制框图
3.2程序设计
本控制器软件系统采用实时操作系统FreeRTOS来调度各个任务,它是一个轻量级的微内核RTOS,支持优先级调度算法,可根据每个任务的重要程度来赋予其一定的优先级,CPU总是让处于就绪态的、优先级最高的任务先运行,可极大地提高CPU的运行效率,保证各个任务实时快速响应。
本系统运用RTOS创建了4个任务,具体如下:
(1)电机转子模式及转速设置,优先级为4,如果接收到有效命令则执行相应的设置及操作,人的响应时间为100ms左右,为了让人感觉操作灵敏,任务每20ms执行一次,即得到命令后20ms内CPU就会执行相应的设置。
(2)AD检测任务,优先级为2,对采集来的电流与程序中设置的阈值进行比较,若超过最大值,则使电机进入保护或者报警模式,若采集电流值正常,则进行速度PID调节、电流PI调节、转矩调节、限幅输出PWM,直至电机平稳运行。
(3)串口通信任务,优先级为3,人机界面每33ms自动发一次命令给控制器,控制器进行命令解码,若收到的数据有效,中断程序释放一个信号量,串口通信任务得到信号量后,任务从挂起恢复执行,把得到的命令传送给任务1,若发送成功,返回一个应答命令,然后任务重新挂起,等待下一次信号量的到来。
(4)故障报警指示任务,优先级为5,若缺相、霍尔位置错误、电流过大、堵转则相应的LED会闪烁,并且让电机停止运行,关断继电器,能迅速找到错误所在,节省维修调试时间。
程序系统框架如图7所示。
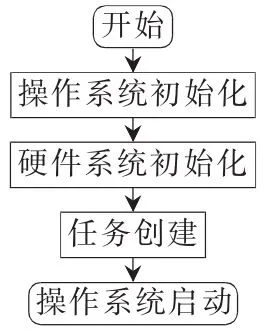
图7 程序系统框架
软件部分把4个任务的部分控制概括融合后进行了简要描述,直观体现了电机的整个控制流程。另外,对于电机控制系统的扩展部分,如键盘显示、数据通信等设计也都有过相关文献论述,就不再赘述。
4 实验结果
本控制对象采用额定电压24V,最高转速3 500r/min的无刷电机。通过上位机给控制器发送命令可驱动电机启动、运行、刹车、停止,实现电机的不同方向的快速切换和各个速度挡速度的改变,既使在大负载下,也能快速启动并达到平稳状态,刹车亦快速平稳[12]。12扇区无磁链观测的二三导通模式直接转矩控制,可以在忽略复杂的磁链估算的前提下,对无刷直流电动机直接转矩控制进行改进,控制简单,容易实现,并且有效地降低了转矩脉动。除以上重要功能外,此控制器还具备上电检测通信、霍尔、缺相等故障,并发出警报,保护电机及避免功率管因电流过大造成永久损害。
5 结论
利用无刷直流电动机速度和电流反馈量作为双闭环控制系统的参数进行PID的调节,并且采用12扇区无磁链观测的二三导通模式直接转矩控制有效地降低了转矩脉动,使电机能够更平稳地运行,并基于STM32型处理器的硬件平台应用实时操作系统进行任务的调度,使开发和控制更加方便灵活。此方案已成功应用于电动轮椅的控制,在实际运行中电机加减速及平稳运行、转弯都可以达到理想的效果。该控制系统响应速度快、调速范围广且精度高、运行平稳,能够有效地减小转矩,在理论和实际应用中都具备一定价值。
[1]邱明,张曙明,曲金泽.两种新型实用直流无刷电机控制器的设计与实现[J].电子技术应用,2006,32(10):77-79.
[2]熊倩.基于SoPC的直流无刷电机控制系统设计[D].大连:大连海事大学,2008.
[3]TAKAHASHI I,NOGUCHI T.A new quick-response and high-efficiency control strategy of an induction motor[J].IEEE Transaction on Industry Applications,1986,22(5):820-827.
[4]ZHONG L,RAHMAN M F,HU W Y,et al.Analysis of direct torque control in permanent magnet synchronous motor drives[J].IEEE Transaction on Power Electronics,1997,12(3):528-535.
[5]杨建飞,胡育文.无刷直流电机无磁链观测直接转矩控制[J].中国电机工程学报,2011,31(12):90-95.
[6]周衍,张兴华.一种简易的无刷直流电动机直接转矩控制[J].微特电机,2014,42(7):54-57,60.
[7]肖儿良,翟万利,倪珍珍.一种新型的无刷直流电动机换相控制算法[J].电子技术应用,2013,39(7):50-53.
[8]李宪全,杨春玲.面向电动车的新型无位置传感器无刷直流电机控制系统设计[J].电子技术应用,2009,35(6):30-33.
[9]董华,尤一鸣,王洪涛.基于DSC的直流无刷电机控制系统设计[J].仪器仪表用户,2009,16(1):31-32.
[10]梅义成,俞建定.基于CAN和TMS320F2812的永磁同步电机控制器的研究[J].宁波大学学报(理工版),2011,24(4):101-105.
[11]吴鹏坤,关振宏.IR21367在无刷直流电机控制中的应用[J].新特器件应用,2011,13(1):19-22.
[12]郭宇飞,姚猛.无刷直流电动机调速的实现[J].电机与控制应用,2009,36(9):13-16.
Design of BLDC control system based on ARM
Wang Xinbiao,Yu Jianding,Wang Qing
(Faculty of Information Science and Technology,Ningbo University,Ningbo 315211,China)
In order to achieve the requirement of fast,smooth and accurate speed control of a brushless DC motor,this paper designed an BLDC controller based on Cortex_M3 kernel processor,and implemented hardware and software parts of the control system.The use of real-time operating system FreeRTOS scheduled tasks.Using the speed and current dual PID control algorithm,it formed a double-loop system that BLDC controled in realtime.In order to more effectively reduce the torque ripple,it achieved a 12 sectorfree flux observed two or three conduction mode direct torque control.The test results show that the control system has rapid response,wide speed range and high precision,stable and reliable performance,low cost and power consumption,and application prospect is very broad.
BLDC;direct torque control;PID algorithm;torque ripple
TM33
A
1674-7720(2015)16-0001-03
王新彪,俞建定,王青.基于ARM的无刷直流电机控制系统的设计[J].微型机与应用,2015,34(16):1-3,7.
2015-03-18)
王新彪(1989-),通信作者,男,硕士研究生,主要研究方向:嵌入式系统与应用。E-mail:15038340634@163.com。
俞建定(1968-),男,高级实验师,主要研究方向:嵌入式系统与应用。
王青(1990-),女,硕士研究生,主要研究方向:嵌入式系统与应用。
猜你喜欢
大电机技术(2022年5期)2022-11-17
汽车实用技术(2022年12期)2022-07-05
电机与控制应用(2022年4期)2022-06-27
南北桥(2022年2期)2022-05-31
信息安全研究(2018年2期)2018-02-28
电脑知识与技术·经验技巧(2017年9期)2018-02-24
电子制作(2017年1期)2017-05-17
电子制作(2016年1期)2016-11-07
西南交通大学学报(2016年4期)2016-06-15
电测与仪表(2016年10期)2016-04-12