
平面连杆机构两种分析方法比较研究
2015-10-17 01:39曹卫锋
现代工业经济和信息化 2015年23期
曹卫锋
(榆林学院能源工程学院,陕西榆林719000)
平面连杆机构两种分析方法比较研究
曹卫锋
(榆林学院能源工程学院,陕西榆林719000)
通过matalb/simulink和机械系统动力学分析软件Adams,研究了平面连杆机构运动的速度、加速度时间历程曲线,并对两种分析结果进行了比较研究。研究结果表明:两种方法得到的分析结果相差不大,最大相对差异不超过3%,两种分析方法的分析效率差别不大,ADAMS虚拟样机方法的建模效率高。
连杆机构;simulink;adams;建模效率
引言
平面连杆机构结构简单,制造容易,便于润滑,被广泛的用于各种机械与仪表中。连杆机构的运动学分析是首要问题。解析法是利用复数向量法建立机构的位置模型,速度与加速度的分析模型,然后求解得到运动学参数。机械系统动力方法ADAMS可以程式化的建立机构的三维样机模型,分析机构的动力学参数[1-2]。四杆机构应用广泛,是构成其它平面多杆机构的基础[3-4],本文通过两种方法建立四杆机构的动力学模型,求解运动学参数,研究两种方法在建模效率、分析结果、分析效率等方面的差异。
1 数值解析法
1)运动学模型的建立铰链四杆机构的结构如图1所示,杆长R1=1.2 m,R2=0.4 m,R3=1 m,R4=0.7 m,曲柄以250 rad/s,顺时针旋转。
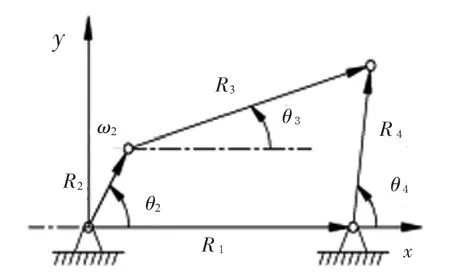
图1 四杆机构图
四杆机构的闭环矢量方程如式(1)所示:

分别将矢量方程投影到x轴和y轴上得到运动学的位置方程,对其两边两次求导得到加速度方程,写成矩阵的形式为:
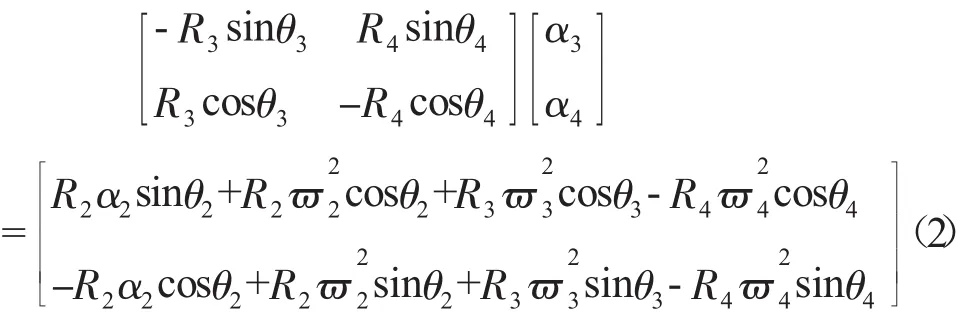
2)simulink分析求解对解析模型,进行simulink数值求解[5],就可以得到连架杆的角速度与角加速度的时间历程曲线。
2 连杆机构的ADAMS分析
1)ADAMS分析模型的建立设杆长参数和解析法相同,在ADAMS中建立连杆机构的分析模型如图2所示。
2)仿真分析设置仿真时间为0.1 s,输出1 000个时间步,仿真类型为运动学仿真,仿真得到连架杆的角速度与角加速度的时间历程曲线。
图2 四杆机构的ADAMS仿真模型
3 两种方法的比较分析
两种分析方法的得到R4的角速度与角加速度的时间历程曲线比较如图3,图4所示。由图可知:两种分析结果非常接近。为了精确的对比分析两种方法的差异,在0到0.1 s间取10个点,计算相对误差。定义相对的误差为:E=(M-A)/M,式中:M为MATLAB求解的结果;A为ADAMS求解结果。相对误差计算结果表明:角速度的最大相对误差为2.78%,角加速度最大相对误差为2.94%,两者的最大相对误差都不超过3%。差异较小。
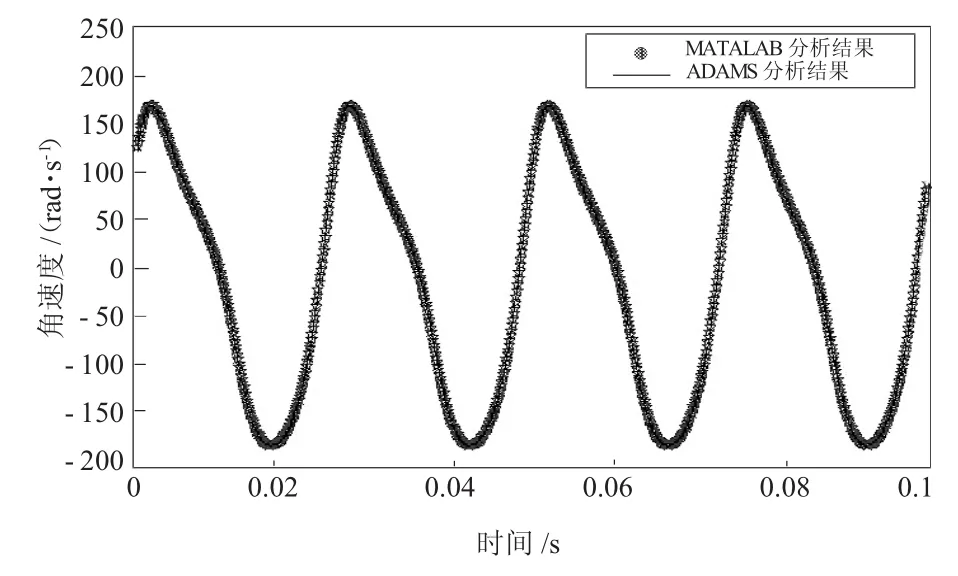
图3 两种分析方法连架杆R4的角速度比较图
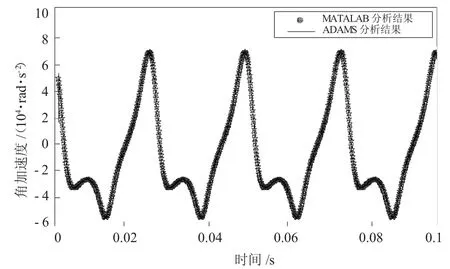
图4 两种分析方法连架杆R4的角加速度比较图
4 结语
本文主要是采用MATLAB解析法和ADAMS虚拟样机技术分别建立了平面四杆机构的动力学分析模型。对该连架杆的速度与加速度进行了分析。结果表明:两种方法的分析结果差异较小,最大相对差异不超过3%。虚拟样机技术具有建模迅速,不需要进行数学推导的优点,采用该方法可以提高分析的效率。解析法和虚拟样机方法得到的计算结果比较接近,说明解析法和虚拟样机方法建模的正确性,借助虚拟样机方法提高了设计的效率和成功率。
[1]吕鲲,袁扬,郭东.牛头刨床六杆机构的优化设计及仿真[J].机械传动,2013,37(3):52-55.
[2]郑凯,胡仁喜,陈鹿民.ADAMS2005机械设计高级应用实例[M].北京:机械工业出版社,2006.
[3]刘菊蓉.基于MATLAB的四杆机构优化设计及仿真[J].机械,2006(33):100-104.
[4]王栗,覃岭,阮卫平,等.机械式压力机曲柄六杆机构运动学特性分析[J].机械传动,2011,35(1):59-61.
[5]李龙海.基于SIMULINK的平面六杆机构仿真分析[J].机械设计与制造,2009,10(1):154-156.
(编辑:王慧芳)
The Study for Two Kinds of Analytical Method of Planar Linkage Mechanism
Cao Weifeng
(School of Energy Engineering,Yulin University,Yulin Shaanxi719000)
Using analytical method Combined with matlab/simulink and mechanical system dynamics analysis software ADAMS,the time history responses of curve for velocity and acceleration of kink four bar linkage were investigated and the analysis results of two methods were compared.The results show that there were smaller differences between kinds of analysis method,The maximum relative difference was not more than 3%,The analysis efficiency of the two methods was small and the efficiency to established model using virtual prototype method was highe r than analytical method.
linkage mechanism;simulink;adams;modeling efficiency
TH702
A
2095-0748(2015)23-0042-02
10.16525/j.cnki.14-1362/n.2015.23.18
2015-10-27
榆林学院高层次人才科研启动基金项目,项目编号:08gk037
曹卫锋(1977—),男,陕西武功人,博士,讲师,从事机械设计的教学与研究。
猜你喜欢
中国特种设备安全(2022年4期)2022-07-08
装备制造技术(2020年4期)2020-12-25
房地产导刊(2020年6期)2020-07-25
河北省科学院学报(2020年1期)2020-05-25
液压与气动(2020年4期)2020-04-10
重型机械(2019年3期)2019-08-27
制造技术与机床(2018年11期)2018-11-23
新课程·下旬(2018年10期)2018-01-28
科学与财富(2018年34期)2018-01-15
中国棉花(2017年10期)2017-11-04
