基于ADAMS运动学分析的复摆型颚式破碎机机构尺度优化*
2015-10-14 07:53李钢
机电工程技术 2015年12期
李钢
(南京工程学院,江苏南京211167)
基于ADAMS运动学分析的复摆型颚式破碎机机构尺度优化*
李钢
(南京工程学院,江苏南京211167)
提出为提高破碎精度和避免堵塞,动颚板运动规律必须满足的三点核心要求。利用计算机辅助工程软件对颚式破碎机工作状况进行运动学分析和优化,使之满足三点要求,实现破碎机机构方案的优选。该方法将现代设计方法在破碎机设计中合理应用,克服常规设计之不足,有利于提升破碎机的综合性能。
颚式破碎机;动颚板;运动学分析;尺度优化
0 引言[1-2]
颚式破碎机是一种广泛应用于矿山、冶金、建材、化工等行业中工业原料破碎作业的重要设备。在矿山工程中,多用来将开采的石料破碎,以获得规定尺寸的矿石。在硅酸盐工业中,则用来对水泥、石灰的固体原料、燃料和半成品进行各种破碎加工,使其粒度达到各道工序的要求以便进一步加工操作或使用。按其工作原理,颚式破碎机分为简摆型与复摆型两种。比较而言,复摆型颚式破碎机结构更简单,质量更轻,破碎物料更均匀,效率更高,因而在中小型破碎作业中得到广泛应用。
颚式破碎机问世一百多年来,经过一代又一代人的不断改进,性能已得到巨大提升。其设计方法上也积累了大量宝贵的经验。目前国内多数破碎机生产企业沿用的,也正是以这些经验为基础形成的、以经验公式、图表、设计手册为主要依据的传统设计方法。近几十年来,计算机技术的广泛使用极大地促进了现代设计理论和方法的发展。因而,如何将现代设计方法的最新成果引入颚式破碎机设计制造流程,变破碎机的静态设计为动态设计,定性设计为定量设计,经验设计为科学设计,成为一个值得高度关注的问题。
1 复摆型颚式破碎机的工作原理
电动机通过带传动驱动皮带轮,皮带轮安装在一根偏心轴上,带轮转动,通过偏心轴的偏心段带动动颚板运动,进入破碎腔内的物料受动颚板的挤压发生破碎,并在重力作用下下落,在下层破碎腔内再次破碎下落,直至粒度达到要求后从出料口排出,如图1(a)所示。

图1 复摆型颚式破碎机的工作原理
由上可知,从运动学角度看,复摆型颚式破碎机实质上可视为一种曲柄摇杆机构,如图1(b),其中偏心段充当曲柄,推力板作摇杆,而动颚板则机构中扮演作平面运动的连杆角色[3]。
2 复摆型颚式破碎机用常规设计法设计的不足
常规设计法被广泛应用于颚式破碎机的设计工作中,通过常规设计出来的颚式破碎机,一般在破碎力、强度、功率、生产能力等方面基本能满足要求。但是要进一步提升破碎机的综合性能,常规设计法的不足就会显现出来。例如,要提高设备的破碎精度和避免堵塞,动颚板需要在运动学上定量满足以下三方面的核心要求:(1)排料口尺寸b,即动颚板下端运动时和定颚板的最大水平距离,此值对应为破碎后矿料最大粒度;(2)排料口水平行程Sx,即动颚板运动时排料口尺寸变化范围,此值对应为破碎后矿料尺寸的变动量;(3)动颚板的工作面上从上到下各点的运动轨迹逐渐从近似圆形轨迹变成近似扁平椭圆轨迹,如图2所示。这样既可以实现矿料在破碎腔靠上部位受到充分挤压而破碎,又可以实现矿料落至排料口附近时,受动颚板下端点上下方向扁平椭圆运动的搓揉作用而向下运送通过排料口,避免排料口的堵塞[4-6]。

图2 动颚板的工作面各点理想轨迹
由于工作时,动颚板所作的是既转又移的平面运动,故作为静态设计的常规设计法难以精确把握其运动规律,无法确保实现上述三点要求。
3 ADAMS环境下产品机构运动学分析及尺度优化的基本思想
ADAMS是一款应用广泛的虚拟样机分析软件。其对虚拟机械系统进行静动力学分析、运动学仿真中的设计功能十分强大,相比其他同类软件具有明显的优势。尤其在机械产品的方案设计,亦即机构设计阶段,ADAMS能发挥出更加显著的作用。通过使用ADAMS运动仿真功能,可以方便直观地检验机构的功能实现。利用AD⁃AMS优化设计功能,还能实现机构的尺度优化。本文尝试将这一基本思想引入破碎机挤压机构的设计,以期克服常规设计之不足,有效提升破碎机的综合性能。
4 ADAMS环境下破碎机的机构运动学分析及尺度优化算例
以主参数600×900的复摆型颚式破碎机为例,根据假定矿石特性规定:排料口尺寸b=90 mm,排料口水平行程Sx=17~20 mm,动颚板的工作面上从上到小各点的运动轨迹逐渐从近似圆形轨迹变成近似扁平椭圆轨迹。应用上节方法对机构运动学分析及尺度优化,使之满足这几点要求。
(1)按传统经验进行常规正向设计,初定机构几何模型
按设计手册提供的经验公式和参数取值范围初步进行机构设计,确定机构几何模型基本形式和尺度,如图3所示。

图3 初定机构尺度参数简图

图4 ADAMS中建立的虚拟样机简图
图中,多边形AEFHI为动颚板外形,由于动颚板是破碎功能直接执行件,尺寸庞大,结构复杂,过度简化将引起仿真结果的较大偏差,所以尽量将其实际外形保留,并且在动颚板工作面上从上到下等间距布置A、B、C、D、E五个观测点,用于描述动颚板运动轨迹。杆IK表示偏心轴,杆GJ代表推力板,这里只确定推力板GJ的长度,而铰链点J的确切位置并未定死,作为优化中的设计变量处理。
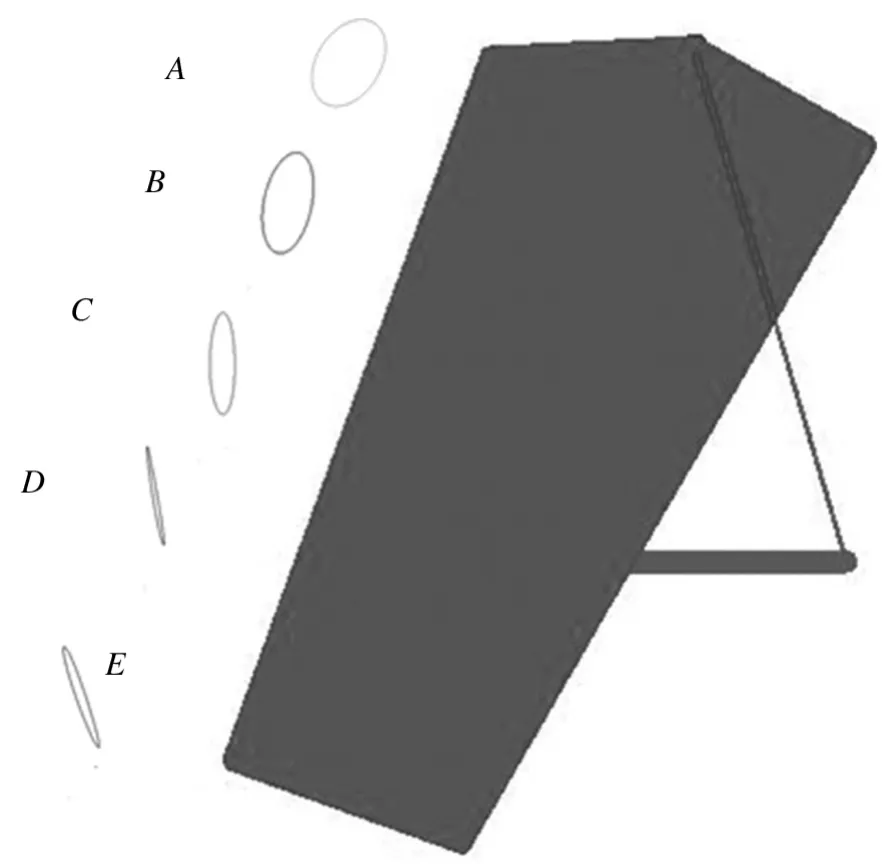
图5 动颚板观测点仿真过程运动轨迹图
(2)ADAMS环境下的虚拟样机构建
对应于机构参数简图,在ADAMS环境下依次进行几何建模,约束添加,载荷施加,完成破碎机虚拟样机建设,如图4所示。
(3)ADAMS环境下进行运动学仿真分析和优化
设推力板GJ位置为设计变量,测量E点水平位移量Sx=70~90 mm为目标,进行优化并进行运动学仿真分析。结果如下:
J点坐标取在(1328,-1035,0)时,机构运动最佳。
动颚板A、B、C、D、E五个观测点运动轨迹如图5所示。
由于原仿真各点轨迹线大小很小,易被遮挡,所以这个作了放大处理。
可以看出:动颚板的工作面上从上到下各点的运动轨迹,满足逐渐从近似圆形轨迹变成近似扁平椭圆轨迹的要求。
图6为动颚板排料口水平方向位移图。

图6 动颚板排料口水平方向位移图
由图可知,排料口尺寸b约为90 mm,排料口水平行程Sx在70~90 mm范围内变动,符合要求。
5 结语
仿真分析表明:利用ADAMS运动学仿真分析和优化的方法,可以在破碎机设计初始方案阶段,对机器的工作状态实现精确的把握,使得不同个体方案间的取舍以及个体方案参数优化,有了操作简便、结论科学的依据。对于在整个设计过程中,减轻设计师的工作量,少走弯路,有着显著的指导作用。该方法将现代设计方法在破碎机设计中合理应用,克服静态常规设计之局限性,有利于提升破碎机的综合性能。
[1]廖汉元.腭式破碎机[M].北京:机械工业出版社,1995.
[2]郭年琴.颚式破碎机现代设计方法[M].北京:冶金工业出版社,2012.
[3]窦照亮,董为民.颚式破碎机工作装置的运动仿真研究[J].矿山机械,2009,37(23):82-84.
[4]刘长福.颚式破碎机的运动学及动颚和机架的仿真与优化[D].太原:太原理工大学,2012.
[5]赵丽梅.基于RecurDyn的颚式破碎机工作装置运动学分析[J].矿山机械,2012,33(3):99-101.
[6]GUO Nianqin,HUANG Weiping.Finite element optimi⁃zation Design of the moving jaw on PG5282 jaw crusher[J].Advanced Materials Research,2012,423-432:1614-1618.
The Optimization on Main Dimensions of the Mechanism of a
Compound Pendulum Jaw Crusher Base on Kinematics Simulation by Software ADAMS
LI Gang
(Nanjing Institute of Technology,Nanjing211167,China)
In this paper,three core conditions of the law of moving jaw are raised in order to improve crushing accuracy and avoid blocking.Kinematics Simulation analysis of jaw crusher is used by CAE software ADAMS to satisfy the three conditions and main dimensions of the mechanism is optimized.The method of this article has a guiding significance for application of modern design approaches in jaw crusher’s design to overcome the shortage of conventional design and raise its integrated performance.
jaw crusher;moving jaw;kinematics simulation;dimensions optimization
TD451
A文献标识码:1009-9492(2015)12-0062-04
10.3969/j.issn.1009-9492.2015.12.017
李钢,男,1970年生,广东梅州人,硕士,副教授。研究领域:机械设计制造理论与方法。已发表论文10篇。
(编辑:向飞)
*南京工程学院创新基金(编号:CKJB201301)
2015-09-23
猜你喜欢
内蒙古民族大学学报(社会科学版)(2020年2期)2020-11-06
模具制造(2020年6期)2020-08-03
河北省科学院学报(2020年1期)2020-05-25
模具制造(2019年10期)2020-01-06
制造技术与机床(2018年11期)2018-11-23
太空探索(2016年5期)2016-07-12
橡胶科技(2016年10期)2016-02-24
化工进展(2015年6期)2015-11-13
海军航空大学学报(2015年1期)2015-11-11
时代英语·高三(2014年5期)2014-08-26