襟缝翼PDU无刷电机控制系统的设计与实现
2015-10-14 07:53庞登峰冯作全
机电工程技术 2015年12期
庞登峰,冯作全,董 峰
(1.兰州兰石能源装备工程研究院有限公司,甘肃兰州730030;2.兰州万里航空机电有限责任公司,甘肃兰州730070)
襟缝翼PDU无刷电机控制系统的设计与实现
庞登峰1,冯作全1,董峰2
(1.兰州兰石能源装备工程研究院有限公司,甘肃兰州730030;2.兰州万里航空机电有限责任公司,甘肃兰州730070)
设计了一种应用于飞机襟缝翼PDU的高压大功率无刷直流电机控制系统,给出了其接口及硬件原理,并对其进行了试验验证,试验结果表明,襟缝翼PDU高压大功率无刷直流电机控制系统的控制效果优越,具有响应速度快、调节范围宽、控制精度高、平稳性良好的特点。该控制系统已于某机种中进行了实际应用,运行良好。
无刷直流电机;PDU;控制系统
0 引言
自19世纪30年代以来,电动机作为机电能量转换装置,其应用范围已经遍及国民经济的各个领域以及人们的日常生活中。众所周知,直流电动机具有运行效率高和调速性能好的诸多优点,但传统的直流电动机均采用电刷以及机械方法进行换向,存在机械摩擦,因此带来了噪声大、电磁干扰以及寿命短等致命弱点,从而大大限制了其应用范围[1]。
随着电子技术、微电子技术及永磁材料的快速发展,针对上述直流电动机的弊病,早在1917年,Boliger就提出用整流管代替传统直流电动机的机械电刷,从而诞生了无刷直流电动机的基本思路。1955年,美国D·Harrison等人首次申请了应用晶体管换向代替电动机机械换向的专利,标志着现代无刷电动机的诞生。但由于该电动机无启动转矩而不能产品化。此后借助于霍尔元件来实现换向的无刷直流电动机终于在1962年问世,从而开辟了无刷直流电动机产品化的新纪元[2]。近年来,无刷直流电动机已广泛应用于航空电传系统。
本文设计了一款应用于某飞机襟缝翼PDU(动力传动组件)的无刷直流电动机的控制系统,并给出了相关实验数据。
1 系统接口关系
本文中的襟缝翼PDU采用270 V高压大功率稀土永磁无刷直流电动机。如图1所示,襟缝翼PDU接收来自襟缝翼控制器的行程差值指令和行程目标指令,襟缝翼PDU双电机工作,驱动襟缝翼作动线系,依靠自身的控制程序实现对执行部件输出轴的速度闭环控制功能。控制单元通过429总线接收襟缝翼控制器指令,控制襟缝翼PDU动作,并向襟缝翼控制器上传襟缝翼PDU工作状态;接收超控开关操纵指令,控制襟缝翼PDU动作。驱动单元通过RS429接收控制单元的速度给定指令,驱动无刷电机以给定转速进行正反向旋转或制动。同时,驱动单元实时采集电机电流、转速数据,并通过429总线上传给控制单元。
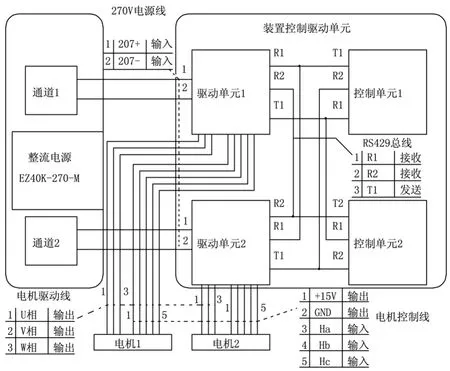
图1 接口关系
2 系统硬件设计
2.1控制驱动单元原理
在控制方式和控制原理上,采用比较成熟的双闭环控制。如图2所示,速度环接受控制单元输入的速度指令和电机的转速反馈信号,电机实际转速和指令之间的差值经PI调节器的放大作为电流环的输入指令[3]。

图2 驱动单元原理框图
电流环接收电流采样电路采集的电机电流值,与速度环来的电流给定值进行比较,其差值经过PI调节器放大输出送PWM脉宽调制电路,获得离散化处理的功率器件的开通信号,此信号送到功率驱动部分控制功率器件IGBT的通断。
2.2电流保护电路
如图3所示,电流的检测由电流互感器和I/V转换电路组成[4]。采用软硬件结合的方式实现,电流互感器采样到的电流值经I/V电路转换为电压值后,分为两路输出,一路输出直接到由比较器构成的硬件电流保护电路中,与通过电位计设定的电流值进行比较,实现电流的硬件保护;另一路输出经过MAX187串行A/D转换器后进入DSP,通过软件滤波处理后与软件设定电流值进行比较,实现软件电流保护功能。
2.3电机驱动电路设计
电机的功率驱动电路主要包括隔离电路、驱动电路、三相桥式功率IGBT逆变等电路;主要用于完成功率电路与控制电路的隔离、功率元件的驱动、功率逆变(放大)等功能。电动机为三相六状态无刷工作方式,由于电机功率较大(额定13 kW),直流母线供电电压为270 V,额定电流约为75 A,所以,主功率开关器件采用了双路集成高压大电流的IGBT,最大集极电流能到300 A,最大集射极电压为600 V。采用6片集成IC专用驱动芯片作为六只开关功率管T1~T6的驱动,前级控制信号与后级驱动信号通过光耦完全进行隔离,并且每个功率管电路采用单一电源,电源选用6片专用电源供电芯片。另外为防止门极过电压,在G-E间连接齐纳二极管等保护措施。驱动电路原理图如图4所示。

图3 电流采样及保护电路
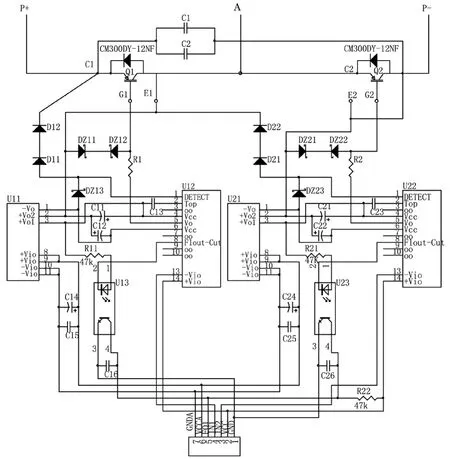
图4 功率驱动部分设计
自检测电路、位置检测及换向电路、D/A转换电路等均为成熟技术,本文不做详细介绍。
3 无刷电机速度、电流双闭环控制
如图5所示,无刷电机调速系统采用速度、电流双闭环系统,因此需要速度调节器和电流调节器[5]。速度调节器的作用是对给定速度与反馈速度之差按一定的规律进行运算,并通过运算结果对电机进行速度调节控制。由于电机的转动惯量和负载转动惯量的存在,使速度时间常数较大,系统的响应较慢。所以要用电流调节器提高响应速度。
电流调节器有两个作用。一个是在启动和大范围加减速时起电流调节和限幅作用,因为此时速度调节器呈饱和状态,其输出信号一般作为极限给定值加到电流调节器上,电流调节器的作用结果是使绕组电流迅速达到并稳定在其最大值上,从而实现快速加减速和电流限流作用。另一个作用是使系统的抗电源扰动和负载扰动的能力增强。
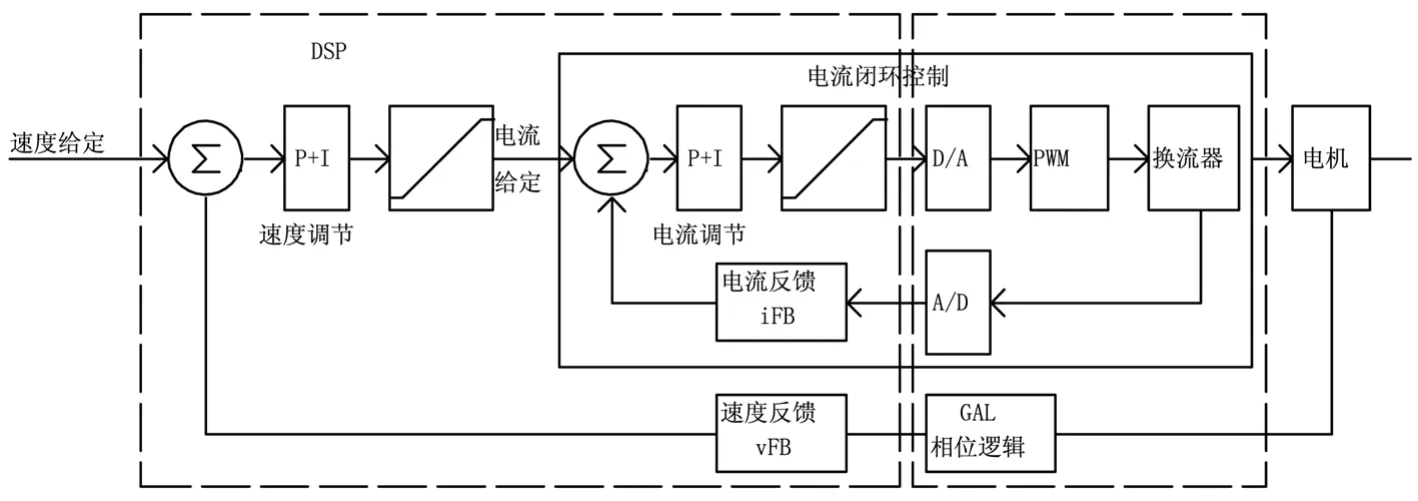
图5 电流、转速双闭环控制框图
在实际应用中速度调节器、电流调节器都采用PI(比例、积分)调节算法,该系统是数字系统,采用的都是数字量,所以必须把PI算法离散化才能使用。又由于系统的存储空间有限,算法的存储空间开销不能太大,所以采用了离散化的增量式PI算法。该算法在运算过程中只需要保留最近3次的误差数据,就能够推导出下一次的输出量,节省了大量的数据空间,提高了运算速度,有很强实用价值。
公式如下:

其中△μ(k)=KP(e(k)-e(k-1)+Kie(k)μ(k)、μ(k-1)分别是k和 k-1时刻的输出量,在系统中体现为D/A的输出量;e(k)、e(k-1)分别是k、k-1时刻的偏差值,在系统中体现为该时刻实际值与目标值的偏差;KP是PI调节公式的比例系数,Ki积分系数,不同的数值代表着PI调节系统的积分、比例调节作用的强度和效果。
PI调节合理的参数估计、比较,可以通过MATLAB的传递函数模型仿真来得到,最终结合实际负载通过大量的实验得到合适的参数,达到理想的控制效果。
控制算法的程序流程图如图6所示。
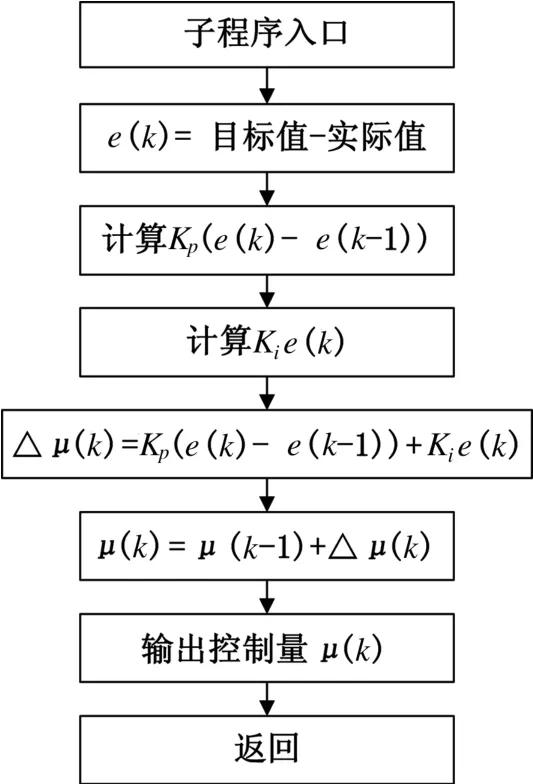
图6 PI调节算法流程图
4 试验验证
为了验证控制系统的实际效果,对本系统进行了实体试验,试验对象为270 V无刷直流电机作动系统,该双余度速度伺服电力作动系统由两台独立的三相稀土永磁无刷直流电动机(BLDCM)、差速传动齿轮减速器和相关传感器组成,余度工作方式采用热备式。
由于无刷直流电动机三相绕组采用“Y”形接法,系统数学模型按照电机在120°导通三相六状态方式下建立,采用速度、电流双闭环控制进行试验,转速用转速表测量,电机输出数据由加载显示设备进行记录,输入数据由WT3000功率仪记录,功率仪接线方式选择

图7 测试数据
3 V/3 A方式,其中将Element1电压测量线接AC线间,A相接+,C相接-,电流传感器接A相;Element2电压测量线接BC线间,B相接+,C相接-,电流传感器接B相;Element3电压测量线接AB线间,A相接+,B相接-,电流传感器接C相,电流传感器测三相115/200 VAC输入电流。
由于测试数据较多,本文只给出一组数据,测试数据如图7所示,其中U1、U2、U3分别为AC、BC、AB间线电压,I1、I2、I3分别为电机A、B、C相电流,电流I4为115/200 VAC电源输入相电流,P∑A为电机的输入功率,T=200 N·m,传动机构输出功率P1=33.02 kW,电机输入功率P1=38.6 kW,电机转速n=7 173 r/min,机构传动效率η=85%。
5 结论
本文设计了一款飞机襟缝翼PDU高压大功率无刷直流电机控制系统,并进行了试验验证,验证结果表明:在闭环状态下,无刷电机能够根据要求,通过控制器电位计设定转速给定值,使电机转速在要求的范围内连续变换,实现无极调速。在给定转速为7 220 r/min和1 380 r/min,负载从空载到1.2倍额定负载范围内变化时,速度仍能保持稳定,误差在20 r/min范围内,稳速特性良好,且电机正转和反转运行特性基本相同,具有良好的一致性和对称性。目前该系统已在某飞机进行了实际应用,运行效果良好,整体性能优越。
[1]叶金虎.现代无刷直流永磁电动机的原理和设计[M].北京:科学出版社,2007.
[2]王成元,张琛,夏加宽,等.直流无刷电动机原理及应用现代电机控制技术[M].北京:机械工业出版社,2009.
[3]罗乐.DSP技术在直流电机控制系统中的应用研究[J].制造业自动化,2012,9(34):67-71.
[4]柴凤.永磁无刷电机及其驱动技术[M].北京:机械工业出版社,2013.
[5]赵影,李唐娟.无刷直流电机的控制策略与仿真研究[J].电工技术,2010(3):23-25.
Design and Realization of the Flap and Slat PDU BLDCM Control System
PANG Deng-feng1,FENG Zuo-quan1,DONG Feng2
(1.Lanzhou Lanshi Engineering Research Institute of Energy Equipments Co.,Ltd.,Lanzhou730030,China;2. Lanzhou Wanli Aviation Electromechanic INC,Lanzhou730070,China)
This paper designed a kind of high voltage high power BLDCM control system applied to the flap and slat PDU of aircraft,the principle of hardware and interface is introduced,and the entity test is carried out.The results of test show that the control effect of the Flap and Slat PDU high voltage high power BLDCM control system is superior.This control system has the advantages of fast response speed,wide adjusting range,high control precision and good stationeriness.This control system has been applied to control Lapel Slat system with one of aircraft the wing system,and running well.
BLDCM;PDU;control system
TM33
A文献标识码:1009-9492(2015)12-0022-04
10.3969/j.issn.1009-9492.2015.12.006
庞登峰,男,1982年生,吉林永吉人,硕士,工程师。研究领域:机电一体化设计。
(编辑:阮毅)
2015-07-02
猜你喜欢
疯狂英语·新悦读(2022年7期)2022-11-23
汽车实用技术(2022年7期)2022-04-20
北京第二外国语学院学报(2021年2期)2021-08-13
房地产导刊(2020年11期)2020-12-28
铁道通信信号(2019年4期)2019-10-10
通信电源技术(2016年1期)2016-04-16
共产党员(辽宁)(2015年6期)2015-06-07
电源技术(2015年9期)2015-06-05
电测与仪表(2015年20期)2015-04-09
电测与仪表(2015年3期)2015-04-09