
惯导与视觉相结合的AGV小车控制系统设计
2015-10-13 09:09张永泽艾长胜张尉
山东工业技术 2015年20期
张永泽 艾长胜 张尉
摘要:随着社会的发展与进步,人们对自动化生产的迫切需求越来越大。为进一步推动生产系统的柔性化中,AGV小车在物料运输方面起到了重要的作用。AGV小车的分类比较多,如电磁导引小车、激光导引小车、磁条导引小车惯性导引AGV小车等。因惯性导航系统灵活性高、技术先进、定位精度高、适用范围广等优点。但同时也存在累积误差比较大并且难以消除等缺点。本文就以惯性导引小车为主要研究对象,并将惯导技术与视觉传感器技术相结合,实现AGV小车的路径规划。
关键词:AGV;惯性导航;视觉导航;控制系统1AGV小车简介及分类
1.1AGV小车简介
自动导引小车是指装有电磁或光学等自动导引装置, 可以按照指定的或固定路径行驶的, 并且具有保护装置以及运输功能的运输小车。
1.2AGV小车的分类
1.2.1磁导引方式
优点是磁条的铺设过程比较简单,并且路线调整比较容易。缺点是磁带外漏,易受到磨损、污染及机械损伤。
1.2.2激光导引方式
优点是线路比较容易调整,使用范围比较广,无需铺设导线。这种导引方式的缺点是受到外界光线的影响比较大。
1.2.3视觉导引方式
优点是在AGV小车的前端装有CMOS视觉传感器,通过图像采集卡将采集到的信息转化为能够被识别的信号。
1.2.4惯性导引方式
这种导引方式的主要元器件是陀螺仪,优点是定位精度比较高,灵活性较强;缺点是累积误差比较大。
2控制系统硬件电路设计
2.1主控制器的选型
AGV小车需要对红外避障模块、防撞模块、惯导模块以及视觉传感器模块输出的信号进行处理。本文选用STM32F103VET6模块作为主控制器。STM32F103系列单片机的内核是32位的Cortex-M3 CPU;拥有32K~128K的闪存程序存储器以及6K~20K的SRAM,其内部资源丰富,处理信息的能力很强,可以满足本文题目的设计要求。
2.2陀螺仪
2.2.1陀螺仪简介
陀螺仪是一种惯性传感器,可组成惯性导航系统。JY-901模块集成了陀螺仪、加速度计、地磁场传感器等微处理器以及内部带有动力学以及卡尔曼滤波算法,可实时输出模块当前的运动状态。
2.2.2陀螺仪输出信号的处理
由于不同厂家制作的陀螺仪的性能不同,在陀螺仪内部进行的处理过程也不同。本文采用JY-901模块,内部已集成角速率转换模块以及滤波模块。使得该模块的输出量为角度。
3电机驱动模块
AGV小车电机的选择。惯导AGV小车的电机选用无刷直流电机。原因是1)直流电机有比较好的启动特性及调速性能;2)直流电机的输出转矩比交流电机的大;3)直流电机通用性比较强,更加便于维修。
4视觉传感器
4.1 视觉传感器的简介
现在主流的传感器有CCD和CMOS,其中CCD摄像头对比度高、动态性能好,并且灵敏度比较高,但是必须需要12V的供电电压,耗能比较大。电路设计比较复杂。CMOS摄像头所采集图像的灵敏度比较高,电路设计比较简单,工作在5V的电压下即可。并且同等条件下,CMOS图像传感器的工作速度高于CCD。因此选择OV7670 CMOS图像传感器比较合适。
5AGV小车控制系统软件设计
5.1利用STM32F103VET6单片机实现PWM调速
要使STM32的TIM3输出PWM信号,具体的配置过程:
(1)开启TIM3时钟及复用功能时钟,配置PB5为复用输出;(2)设置TIM3_CH2重映射到PB5上;(3)初始化TIM3,设置TIM3的ARR和PSC;(4)设置TIM3_CH2的PWM模式,使能TIM3的CH2输出;(5)使能TIM3;(6)修改TIM3_CCR2来控制占空比。
5.2惯导模块控制系统
为实现利用PC机接收通过STM32单片机发送的来自陀螺仪JY-901的信号,需要将模块进行如下连接:STM32F103串口1的Rx接JY-901的Tx,用于接收JY-901模块的数据。STM32F103串口的Rx接电脑的USB-TTL模块的Rx,用于向电脑发送解析后的数据。
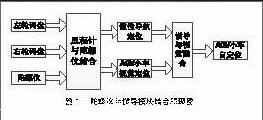
5.3惯导模块与图像传感器模块相结合程序流程图(图1)
6试验结果分析
JY-901惯导模块与STM32单片机连接调试结果
(1)JY-901模块与单片机连接数据采集。采集的数据中“Angle:-22.346 -10.366 147.387”是JY-901模块输出的角度值。另外可以通过改变程序实现单一角度值的输出。对于输出的角度值,可以与预先设定值进行比较,进而通过调节小车电机转速实现AGV小车的直线纠偏;(2) STM32单片机PWM输出实现AGV小车的速度调整。1)硬件连接:在单片机与驱动器之间接了一个光电耦合器,将输出的PWM信号接在光耦的输入端。光耦的输出端接电机驱动器。给单片机通电,再接通总电源;2)软件部分:利用keil uVision4软件,编写并编译PWM信号输出的程序。再利用J-LINK将程序下载到STM32单片机。
给两个电机输出相同的PWM信号,可实现小车的直线行走。由于电机性能不同以及其他因素的影响,得到的电机转速并不相同。此时可以通过调整其中一个输出的PWM信号,从而实现小车转速的同步。
7结论
本文研究了一种基于惯导与视觉相结合的AGV小车,对小车惯导与视觉控制系统进行了较详细的分析。当AGV小车的视觉传感器失灵时,小车的惯导模块开始起作用。惯导模块的主要元器件是一个陀螺仪,将其固定在AGV小车转轴上,可实时输出小车的旋转角度。AGV可通过对陀螺仪偏差信号的计算与采集,结合小车直流电机上安装的编码器来确定小车行走的方向与距离,据此可以计算出小车行走的路程以及进行纠偏。endprint
猜你喜欢
啄木鸟(2022年4期)2022-04-11
幼儿教育·父母孩子版(2019年5期)2019-10-18
科学与财富(2019年11期)2019-08-06
电机与控制学报(2018年9期)2018-05-14
航空模型(2017年8期)2018-02-08
航空模型(2016年11期)2017-05-08
新少年(2017年1期)2017-03-15
计算技术与自动化(2014年1期)2014-12-12
现代电子技术(2009年9期)2009-06-25
中学科技(2008年7期)2008-08-14
