基于图像分块和线段投票的遥感道路边缘线提取
2015-09-26 02:25:32周绍光
自然资源遥感 2015年1期
徐 南,周绍光
(河海大学地球科学与工程学院,南京 210098)
0 引言
随着遥感技术的快速发展,遥感应用越来越广泛。如何充分利用遥感图像的高分辨率特征快速提取和识别目标地物成为目前遥感领域的一个热点问题[1-3]。遥感图像中道路的识别与提取更是当前的一个研究难点和焦点问题[4-6]。
对于高分辨率遥感图像,利用道路几何特征提取道路信息是一种经典的方法,国内外很多专家对此作了大量研究,例如:钟家强等[7]利用道路的线特征检测道路网;肖鹏峰等[8]通过相位一致性对道路进行检测;朱昌盛等[9]采用平行线从遥感图像中提取道路主干道;梅小明等[10]利用Beamlet变换算法提取道路的线状特征;贾承丽等[11]通过Hough变换进行目标道路检测;雷小奇等[12]综合几何形状特征进行道路提取;李燕等[13]利用启发式搜索算法跟踪提取道路信息;周绍光等[14]则采用相位编组法和动态规划法提取道路。
现有方法一般基于2点假设来提取道路:①道路边缘线清晰连续;②道路为规则直线或连续平滑曲线。基于上述假设,传统方法先使用Canny算子检测边缘,再利用Hough变换或直线拟合方法提取道路[15]。对于理想的道路,上述方法可获得较好的提取效果;但大部分道路在遥感图像中并不是直线或规则曲线,道路上的车辆、分隔栏以及道路两旁建筑物与树木的阴影等也会影响道路影像的质量;大部分道路的边缘并不是直线或连续平滑曲线,即使是局部边缘也难以用一个简单的数学方程来严格描述,在这种情况下往往会使传统方法难以奏效。
针对现有方法的上述不足,本文提出如下几点改进:①使用方向模板检测图像中的边缘线,解决道路影像对比度低、边缘线较弱的问题;②将边缘图切割成子块,提取出长度大于给定阈值的直线段,解决传统方法难以顾及道路局部几何信息的问题;③向直线段两端延伸并进行投票,连接处于弯曲边缘线的直线段;④使用一种新方法去除毛刺、分叉和杂乱结构,得到道路网。改进后的方法可以较好地提取复杂遥感图像中带有一定曲率、对比度较低、受噪声影响严重的道路边缘线信息。
1 道路边缘线提取
1.1 图像边缘检测流程
对于一般较为清晰的图像,可采用Canny算子检测并细化边缘;而对于较为复杂的高分辨率图像,边缘影像对比度较低,可通过方向模板法获得边缘信息,其流程如下:
1)计算图像各像元的梯度;
2)根据梯度方向将像元划分为若干类(本文取8类,见图1);
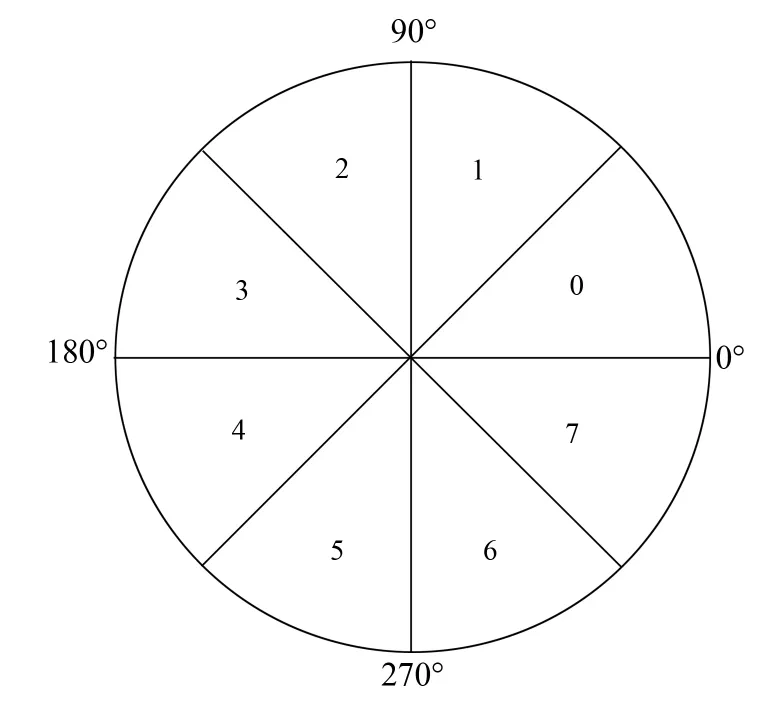
图1 方向梯度划分Fig.1 Division of gradient direction
3)提取梯度模大于给定阈值的像元为边缘点。
基于上述操作,对8个方向上的边缘点分别提取分块子线段并通过投票连接子线段,去除毛刺和杂乱边缘线,取其并集形成最终道路网。
1.2 分块子线段提取
高分辨率遥感图像中的道路受道路两旁树木和建筑物的阴影以及道路上车辆等多种因素的影响,一般难以形成直线或者连续平滑边缘;但局部道路可被认为是直线段,因此本文通过选取合适的m0×m0子块,以保证每个子块中只包含1~2条较长的短直线段。对于每个子块,获取子线段的方法如图2所示。
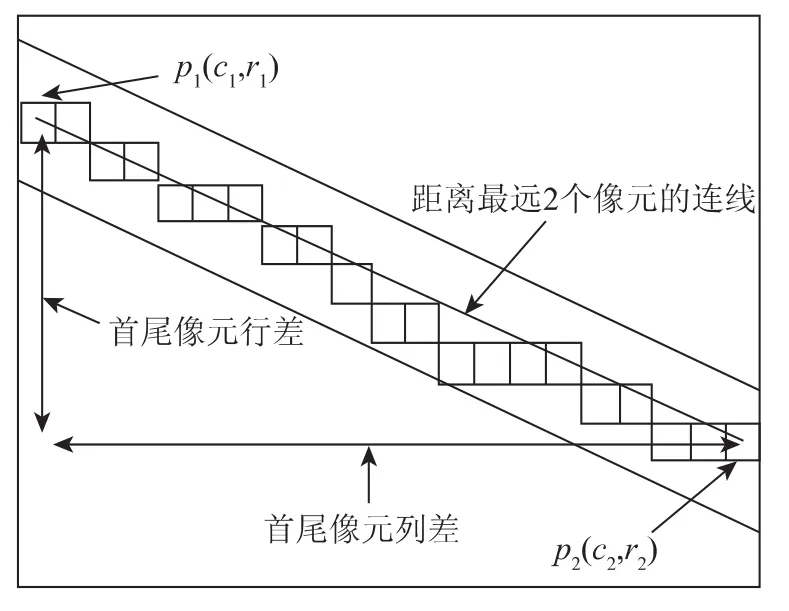
图2 子块中线段提取Fig.2 Extraction of line segments in sub- block
提取各子块中直线段的步骤如下:
1)检测第i个子块中边缘像元个数,若像元个数小于给定阈值Psub,则认为该子块中无直线段,进入下一子块;否则在子块中找出距离最大的2个点p1(c1,r1)和 p2(c2,r2);
2)计算p1和p2两点间的距离 d(p1,p2),记为d12;设d0为线段最短长度阈值,若d12<d0,则该子块无直线段,i=i+1,转至步骤1);
3)连接p1和p2两点,形成直线段,以该线段为中轴线向两侧扩展为以W0为宽度(W0为奇数)并与子块边框相交的带状区域,若落在该带状区域中的边缘像元点个数小于给定阈值Pline,则将2个端点归零,转至步骤1);否则认为该带状区域内存在一条直线段,保存该直线段及其相关信息,并将已检测出来的直线像元归零,转至步骤1);
4)若完成图像遍历,则跳出循环;否则转入下一子块,i=i+1。
1.3 投票与子线段连接
经过上述分块提取子线段,可获得各子块中的直线段;但这些直线段难以自动形成较好的道路边缘线,在道路端头、拐弯以及受噪声影响严重处会存在断裂和遗漏。因此,在此处采用基于直线段投票的方法来连接各子线段,依次形成以各子线段中点为中心、W0为宽度、L0为长度的平行四边形投票区域,对各投票区域进行投票。各直线段投票区域如图3所示。
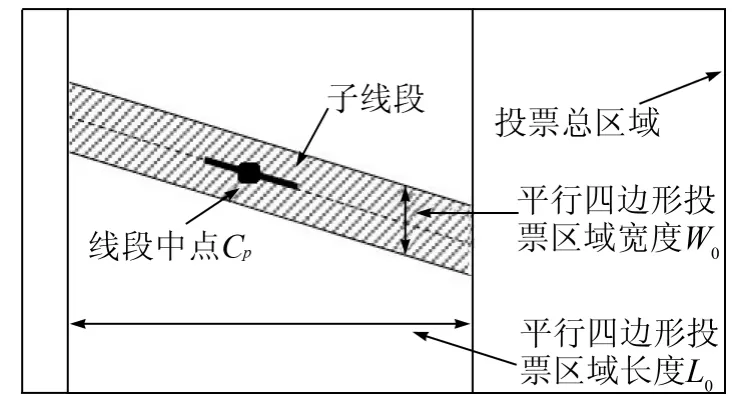
图3 直线段投票区域示意图Fig.3 Voting zone of straight- line segment
投票数组的计算流程如下:
1)设置与原图像大小相同的投票数组Mm,n,各元素初始化为零,用来存放各像元票数;
2)顺次计算每条子线段的斜率和截距,以各子线段中点为中心,构造宽度为W0、长度为L0的平行四边形投票区域Ck,将落入Ck中的像元所对应投票数组元素 Mc,r加上 1,即

3)遍历所有直线段所对应的投票区域,获得投票矩阵Mm,n,筛选出票数大于给定阈值v0的点作为潜在道路点集 Rm,n,即
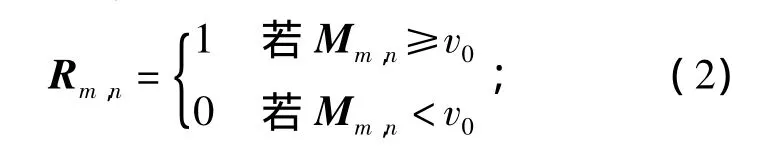
4)将上述潜在道路点集与分块道路边缘图做并集,填补各道路之间的断裂和遗漏,细化边缘线,去除长度小于给定阈值的道路和部分孤立点,以获得连接好的道路。
1.4 毛刺和杂乱结构去除
通过上述处理,可基本提取出遥感图像中的道路;但依然会有部分道路与道路旁的建筑物或者其他微小地物存在粘连的现象,这会对最终的道路边缘线提取造成不利影响,因此必须将道路旁附着的毛刺和一些杂乱边缘线去除,步骤如下:
1)对于每个道路边缘连通成分comp1,找到其端点集,记为ep1;进行若干次腐蚀运算后,端点集记为ep2;再以边缘线图像comp1为掩模、以端点集ep2为种子点进行受限膨胀运算,去除较短的毛刺,此时边缘连通成分记为comp2;
2)寻找每个道路连通域comp2中的端点集ep3和交叉点集cp1,如果端点数量等于2,则该道路不需要处理,此类道路属于集合R1;否则,认为该道路存在毛刺或分叉,此类道路属于集合R2。筛选出每2个端点之间在该连通域中的最长路径作为主要道路,计算交叉点至各端点的距离;若该距离大于给定阈值,则该端点至交叉点之间的通路作为次要道路,否则作为毛刺剔除。道路集合R2经处理后为集合R20;
3)取集合R1和集合R20的并集Ru=R1∪R20,并筛选出其中连通域面积(因为该图像已经过细化运算,所以面积亦即连通域的长度)大于阈值C0的连通域;
4)使用连通域形状指数对上述运算的结果进一步筛选,计算每个连通域的形状指数,去除形状指数小于一定阈值并且连通域面积小于一定阈值的连通域,将筛选出来的连通域集合作为最终的道路边缘集合。
上述步骤2)中搜索主要道路的详细步骤如下:①对第i个连通域,搜索出其ne个端点,若ne≤2,该连通域无毛刺,i=i+1;②对于第j个端点Ej和第 k 个端点 Ek,其中 j,k=1,2…,ne并且 j≠k,使用F(Ej,Ek)表示Ej与Ek之间的最短距离;③选择Rmaini=max{F(Ej,Ek)}作为第i个连通成分中的主要道路。经过上述①—③步骤操作之后,可能会依然存在如图4所示的杂乱结构。
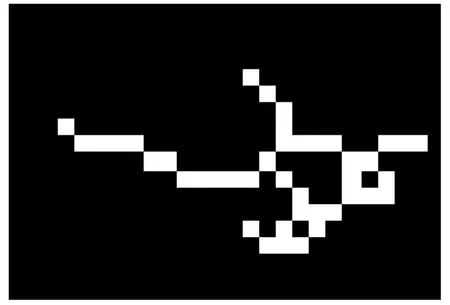
图4 杂乱边缘线Fig.4 Mess edge lines
为去除上述杂乱结构,定义形状指数S,即

式中:Plen为连通成分像元个数;△r为连通区域最小包络矩形的行像元差;△c为边缘线最小包络矩形的列像元差。按照上述步骤提取出的道路边缘线一般呈长条形,其形状指数S会明显小于2,而杂乱边缘线的形状指数会大于2。因此,选取适当的阈值S0可有效地去除图4中的杂乱边缘线。多次实验表明,当S0=2时,可取得较好的效果。
2 实验与结果分析
本文以2景IKONOS图像为例,检验新算法提取道路边缘线的效果(图5—7)。
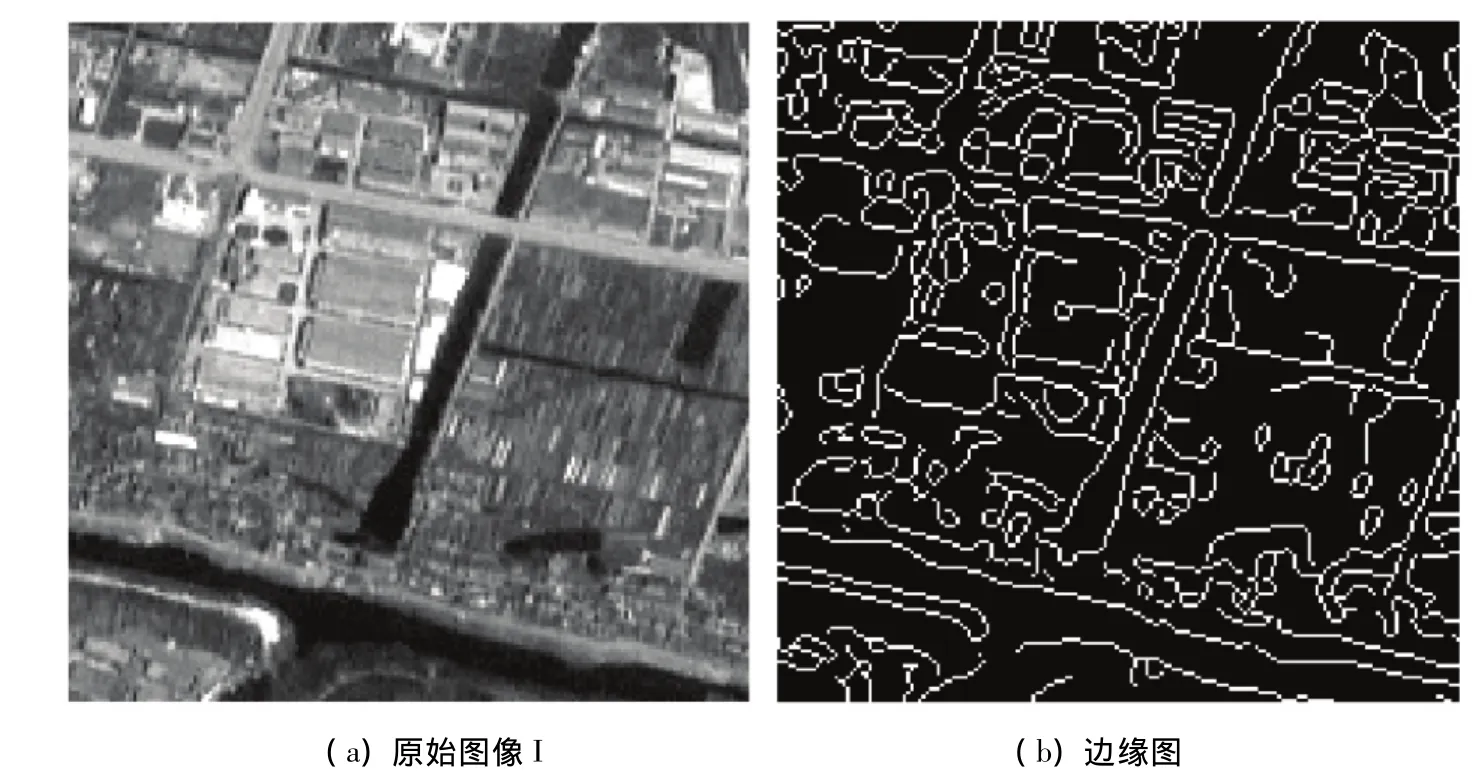
图5-1 本文方法对图像I的实验结果Fig.5-1 Experimental results for image I by method proposed in this paper
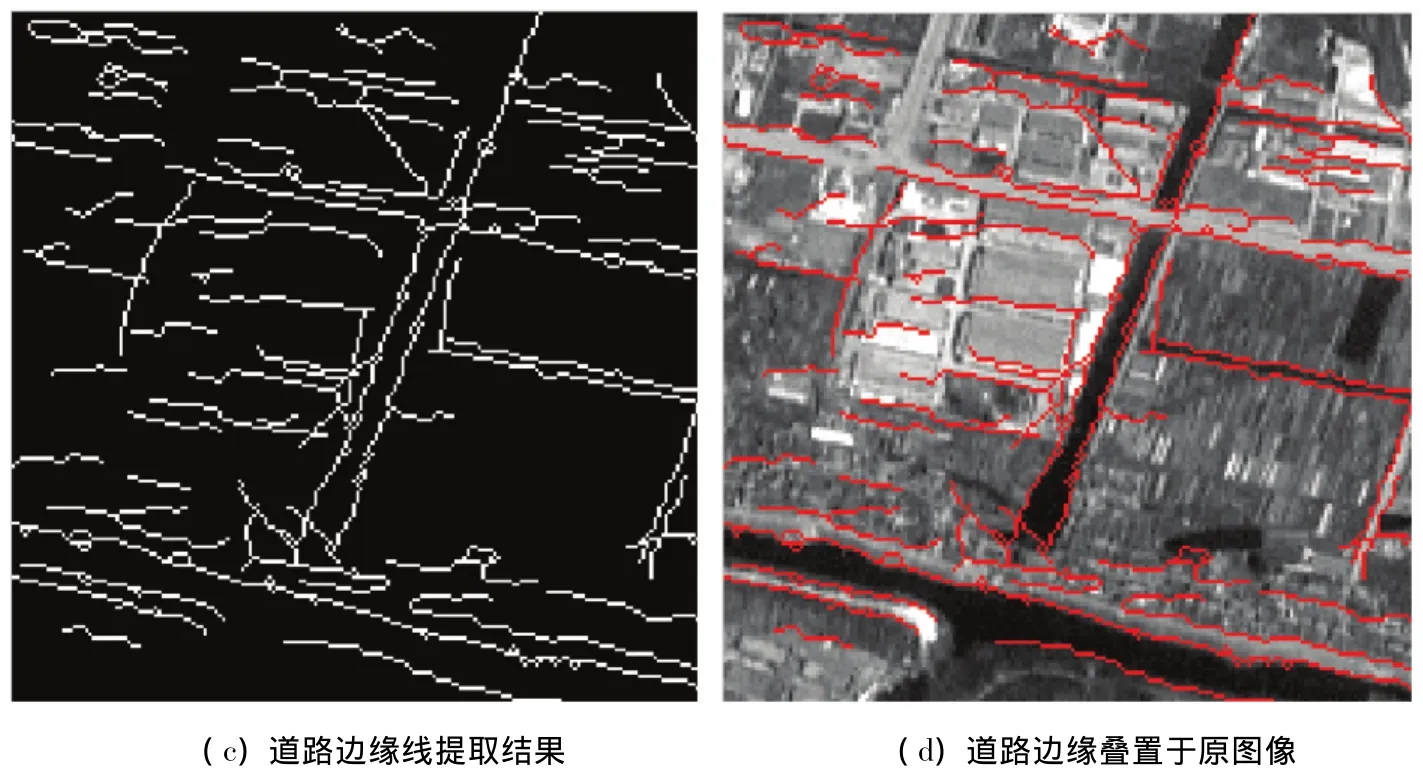
图5-2 本文方法对图像I的实验结果Fig.5-2 Experimental results for image I by method proposed in this paper
实验过程中的参数取值情况如下:m0=20,n0=20,w0=3,W0=3,v0=3,d0=7,Psub=18,Pline=15,S0=2。采用本文方法,从图像Ⅰ中提取出大部分道路边缘线(图5)。
作为对比,给出了使用经典Hough变换方法提取的结果(图6)。

图6 Hough变换法对图像I的实验结果Fig.6 Experimental results of image I by Hough transform method
图像Ⅱ的影像信息比较复杂,故对过短的边缘 线没有作为结果输出(图7)。

图7-1 本文方法对图像Ⅱ的实验结果Fig.7-1 Experimental result of imageⅡ by method proposed in this paper
对于图像Ⅰ和图像Ⅱ,影像地物较为复杂,且对比度较低,使用Canny算子难以提取出完整边缘,故采用方向模板方法进行边缘检测。
对比图5(d)和图6(b)可以看出,本文算法能够较好地提取出高分辨率遥感图像中的道路;而经典的Hough变换只能检测出部分短直线,对于弯曲或不甚规则的道路边缘监测则无能为力,且检测出来的边缘断裂严重。图7中的遥感图像更为复杂,地物种类繁多,道路有一定曲率,部分道路影像对比度较低,但本文方法能提取出绝大部分道路的边缘线。
为更加清楚地看出本文算法中的投票过程,特放大局部图像,以观察其投票前后的变化(图8)。

图8 局部图像投票前后变化Fig.8 Changes of local image before and after voting
在图8中:(a)图给出局部放大的遥感图像;(b)图为投票连接之前的局部图像,存在较多断裂和遗漏;(c)为投票连接后的局部图像,各段直线之间能够很好地连接。通过对比可以看出,采取延伸投票之后可以很好地连接发生弯曲的线段或各分块中的子线段,形成连续完整的道路边缘线。
一般文献定义查全率(precision)和查准率(recall)2种指标[16],用于研究图像分类中这2个指标的相互关系。本文借助这2种指标衡量2景固定图像的道路提取精度,即

式中:N1为道路边缘总段数;n1为被正确提取出的道路边缘总段数;Pleni为第i个道路边缘的长度。

式中:N2为被提取出的边缘线总段数;n2为被正确提取出的道路边缘线总段数;Plenj为第j个道路被提出的边缘线的长度。
本文实验中,2景图像的查全率分别为86.3%和90.1%,查准率分别为90.3%和92.7%。
已发表的论文中一般只计算出道路边缘线提取结果的查全率(比如文献[14]),经比较发现,本文方法提取道路边缘线结果的查全率优于上述文献。
3 结论
1)传统边缘检测算子如Canny算子难以检测出弱边缘线,而方向模板法利用相位信息和图像像元之间的连通关系可获取图像中的弱边缘线;经典Hough变换和基于最小二乘方法的鲁棒性较差,无法检测出存在弯曲、低对比度、受噪声影响严重的道路。本文将所获得的8个方向的边缘图分别进行分块,搜索子线段;以一定宽度向线段两边延伸形成平行四边形投票区域,筛选出潜在道路点以连接子线段,选取长度大于给定阈值的线段作为最终道路边缘线;去除毛刺和杂乱边缘线,取8个方向道路边缘线的并集,获得最终道路网。
2)使用本文方法对2景IKONOS图像进行实验的结果表明,本文算法对于存在弯曲、对比度较低的高分辨率遥感图像可以识别,并能提取出较为清晰的道路边缘线,而对于边缘清晰的道路影像则具有更好的提取效果。
[1]明冬萍,骆剑承,沈占锋,等.高分辨率遥感影像信息提取与目标识别技术研究[J].测绘科学,2005,30(3):18-20.Ming D P,Luo J C,Shen Z F,et al.Research on information extraction and target recognition from high resolution remote sensing image[J].Science of Surveying and Mapping,2005,30(3):18-20.
[2]刘晓沐,季 艳,万寿红.单源可见光遥感图像中的水域识别[J].仪器仪表学报,2006,27(6):2086-2087.Liu X M,Ji Y,Wan S H.Waters recognition in single-source visible remote sensing image[J].Chinese Journal of Scientific Instrument,2006,27(6):2086-2087.
[3]张伟伟,毛政元.一种面向高空间分辨率遥感影像的路口自动定位新方法[J].国土资源遥感,2012,24(1):13-16.Zhang W W,Mao Z Y.A new approach to automatic positioning of road junctions in high spatial resolution remotely sensed imagery[J].Remote Sensing for Land and Resources,2012,24(1):13-16.
[4]高芳琴,吴健平.遥感图像识别中线性地物提取方法研究[J].仪器仪表学报,2005,25(4):653-656.Gao F Q,Wu J P.Detecting linear object in remote sensing image recognition[J].Chinese Journal of Scientific Instrument,2005,25(4):653-656.
[5]吴 亮,胡云安.遥感图像自动道路提取方法综述[J].自动化学报,2010,36(7):912-922.Wu L,Hu Y A.A survey of automatic road extraction from remote sensing images[J].Aota Automatica Sinica,2010,36(7):912-922.
[6]董占杰,毛政元.基于道路绿地特征的遥感影像道路信息提取方法研究[J].国土资源遥感,2011,23(2):43-46.Dong Z J,Mao Z Y.Methodological research on road extraction based on characteristics of road greenbelts in remotely sensed imagery[J].Remote Sensing for Land and Resources,2011,23(2):43-46.
[7]钟家强,王润生.一种基于线特征的道路网变化检测算法[J].遥感学报,2007,11(1):27-32.Zhong J Q,Wang R S.A road network change detection algorithm based on linear feature[J].Journal of Remote Sensing,2007,11(1):27-32.
[8]肖鹏峰,冯学智,赵书河,等.一种基于相位一致的高分辨率遥感图像特征检测方法[J].遥感学报,2007,11(3):303-310.Xiao P F,Feng X Z,Zhao S H,et al.Feature detection from high-resolution remotely sensed imagery based on phase[J].Journal of Remote Sensing,2007,11(3):303-310.
[9]朱昌盛,周 伟,关 键.基于平行线对检测的SAR图像主干道提取算法[J].中国图形图象学报,2011,16(10):1908-1917.Zhu C S,Zhou W,Guan J.Main roads extraction from SAR imagery based on parallel pairs detection[J].Journal of Image and Graphics,2011,16(10):1908-1917.
[10]梅小明,张良培,李平湘.利用Beamlet变换算法提取遥感图像直线[J].计算机科学,2007,34(12):230-232.Mei X M,Zhang L P,Li P X.Line extraction in remote sensing image with Beamlet transform[J].Computer Science,2007,34(12):230-232.
[11]贾承丽,匡纲要,粟 毅.基于Hough变换的高分辨SAR图像道路目标检测[J].国防科技大学学报,2009,26(1):50-55.Jia C L,Kuang G Y,Su Y.Road extraction from the high- resolution SAR imagery using Hough transform[J].Journal of National University of Defense Technology,2009,26(1):50-55.
[12]雷小奇,王卫星,赖 均.一种基于形状特征进行高分辨率遥感影像道路提取方法[J].测绘学报,2009,38(5):457-465.Lei X Q,Wang W X,Lai J.A method of road extraction from high- resolution remote sensing images based on shape features[J].Acta Geodaetica et Cartographica Sinica,2009,38(5):457-465.
[13]李 燕,余旭初.基于启发式图搜索的遥感影像道路半自动提取[J].测绘学院学报,2002,19(4):268-271.Li Y,Yu X C.Semi- automatic extraction of roads from satellite imagery based on heuristic graph search[J].Journal of Institute of Surveying and Mapping,2002,19(4):268-271.
[14]周绍光,徐 勇.在高分辨率遥感影像中提取无清晰连续边缘线的道路[J].测绘学报,2008,37(3):301-307.Zhou S G,Xu Y.To extract roads with no clear and continuous boundaries in remote sensing images[J].Acta Geodaetica et Cartographica Sinica,2008,37(3):301-307.
[15]韩秋蕾,朱 明,姚志军.基于改进Hough变换的图像线段特征提取[J].仪器仪表学报,25(4):436-439.Han Q L,Zhu M,Yao X J.Line segment feature extraction based on improved Hough transform[J].Chinese Journal of Scientific Instrument,25(4):436- 439.
[16]Martin D R,Fowlkes C C,Malik J.Learning to detect natural image boundaries using local brightness,color,and texture cues[J].IEEE Transactions on Pattern Analysis and Machine Intelligence,2004,26(5):530-549.
猜你喜欢
电脑知识与技术(2024年12期)2024-06-16 05:03:12
电脑知识与技术(2024年10期)2024-06-01 05:59:06
数学物理学报(2022年2期)2022-04-26 14:08:34
小学生学习指导(高年级)(2021年5期)2021-05-18 07:34:42
现代计算机(2021年36期)2021-03-14 00:50:40
中学生数理化·教与学(2019年8期)2019-09-18 15:08:40
小学生学习指导(低年级)(2019年3期)2019-04-22 03:34:42
小学生学习指导(低年级)(2019年4期)2019-04-22 03:28:40
计算机应用(2018年12期)2019-01-07 12:16:36
小学生学习指导(低年级)(2018年12期)2018-12-29 11:13:38