激光干涉仪引力波探测器的基本光学结构
2015-09-24 04:16王运永等
光学仪器 2015年4期
王运永等

摘要: 引力波是爱因斯坦广义相对论的重要预言,引力波探测是当代物理学最重要的前沿领域之一。以引力波探测为基础的引力波天文学是一门新兴的交叉科学,是对传统电磁辐射天文学的巨大拓展与补充。作为一种大型的精密光学仪器并作为引力波天文学研究的关键设备,激光干涉仪引力波探测器已在世界各地蓬勃发展起来,开辟了引力波探测的新时代。给出了激光干涉仪引力波探侧器的工作原理和基本光学结构,讨论了主要的性能参数,分析了光学镜的结构特点及测量方法。
关键词:
引力波; 激光; 干涉仪; 光学结构
中图分类号:TH744.3 文献标志码: A doi: 10.3969/j.issn.1005-5630.2015.04.019
Abstract: The existence of gravitational wave is the greatest predictions of Einsteins theory of general relativity. The detection of gravitational wave is one of the important frontier sciences of physics. The gravitational wave astronomy based on the detection of gravitational wave is a new interdisciplinary science. It is a big complimentary and expanding of traditional electro-magnetic astronomy. As a high precision optical instrument and the key equipment of gravitational wave astronomy,laser interferometer gravitational detectors are developing very quickly in the world. It opened a new era of gravitational wave detection. The basic optical structure of laser interferometer gravitational detector and its main parameters have been discussed. The characteristics of mirrors and the measurement method for their parameters have been introduced.
Keywords:
gravitational wave; laser; interferometer; optical structure
引 言
引力波是爱因斯坦广义相对论最重要的预言,引力波探测是当代物理学重要的前沿领域之一。以引力波探测为基础的引力波天文学是一门正在崛起的新兴交叉科学,由于引力辐射独特的物理机制和特性,使得引力波天文学研究的范围更广泛﹑更全面,物理分析更精确﹑更深刻。它以全新的探测理念和探测方法揭示宇宙的奥秘,探寻未知的天体和物质。它能提供其他天文观测方法不可能获得的信息,加深人们对宇宙中天体结构的认识,是继以电磁辐射为探测手段的传统天文学之后,人类观测宇宙的一个新窗口,是对电磁辐射天文学巨大的拓展与补充。作为一种大型的精密光学仪器并作为引力波天文学研究的关键设备,激光干涉仪引力波探测器已在世界各地蓬勃发展起来,开辟了引力波探测的新时代,为引力波天文学研究提供了锐利的武器。
1 激光干涉仪引力波探测器的工作原理
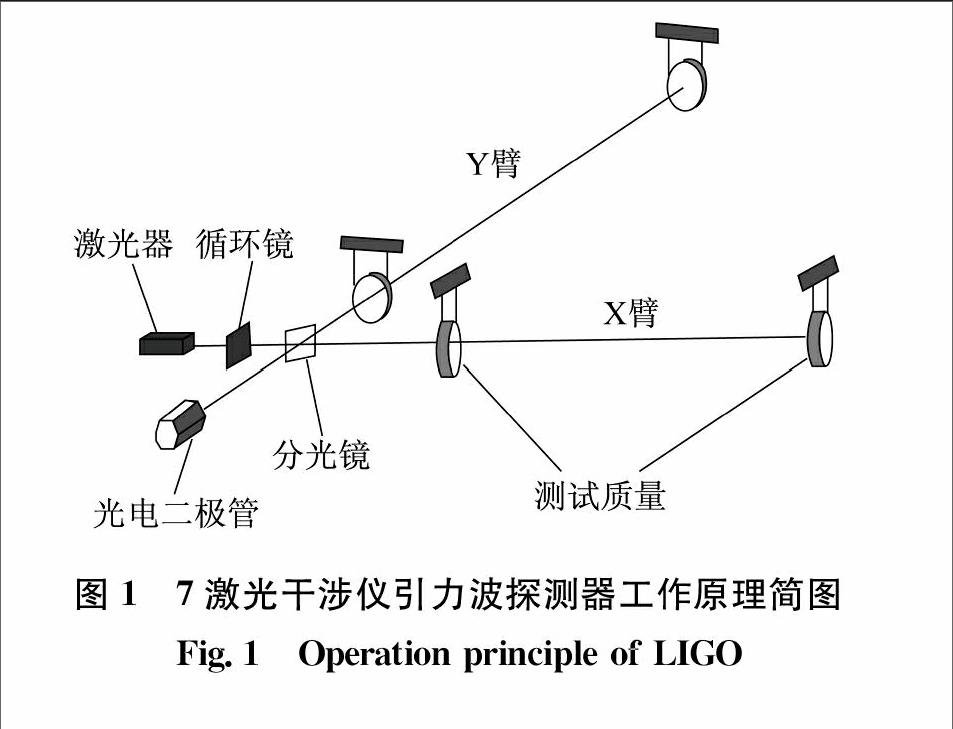
用干涉仪进行科学探测的基本原理是比较光在其相互垂直的两臂中度越时所用的时间。当引力波在垂直于干涉仪所在的平面入射时,由于特殊的偏振特性,它会以四极矩的形式使空间畸变,也就是说,会以引力波的频率,在一个方向上把空间拉伸,同时在与之垂直的方向上把空间压缩,反之亦然。对于激光干涉仪来说,当引力波通过时,干涉仪相互垂直的两臂所在的那部分空间自然也产生拉伸或压缩效应。也就是说,引力波会使干涉仪的一臂伸长而同时又使另一臂缩短。比较光在相互垂直的两臂中度越时所用的时间的变化,就能探测引力波产生的效应,从而知道引力波是否存在。激光干涉仪引力波探测器的工作原理[1]如图1所示。
原则上讲,激光干涉仪引力波探测器是一台“变异”的迈克尔逊干涉仪,其相互垂直的两臂各有一个法布里珀罗腔,并带有光循环镜和其他功能部件。如果不考虑法布里珀罗腔﹑循环镜及其他部件的作用,激光干涉仪引力波探测器就可以简化成一台单次往返的迈克尔逊干涉仪。
从激光器发出的一束单色﹑频率稳定的激光,在分光镜上被分为强度相等的两束,一束经分光镜反射进入干涉仪的一臂(称为Y臂),另一束透过分光镜进入与其垂直的另一臂(称为X臂),在经历了几乎相同的度越时间之后,两束光返回,并在分光镜上重新相遇,并在那里产生干涉。若两束光的度越时间相等(或时间差为光振动周期的整数倍)则两束光在光探测器上干涉减弱呈暗条纹,而返回激光器的那个合光束则是干涉加强呈亮条纹。精心调节干涉仪的臂长使两束光完全相干相减,则探测器探测不到光强,激光干涉仪引力波探测器的输出信号为零。这是探测器的初始工作状态。
当引力波到来时,由于它独特的极化性质,干涉仪两个臂的长度做相反的变化,即一臂伸长时另一臂相应缩短,从而使两束相干光有了新的光程差,破坏了相干减弱的初始条件,有一定数量的光线进入光探测器,使它有信号输出,该信号的大小正比于引力波的无量纲振幅h,探测到这个信号即表明已探测到引力波。
2 激光干涉仪引力波探测器的基本光学结构
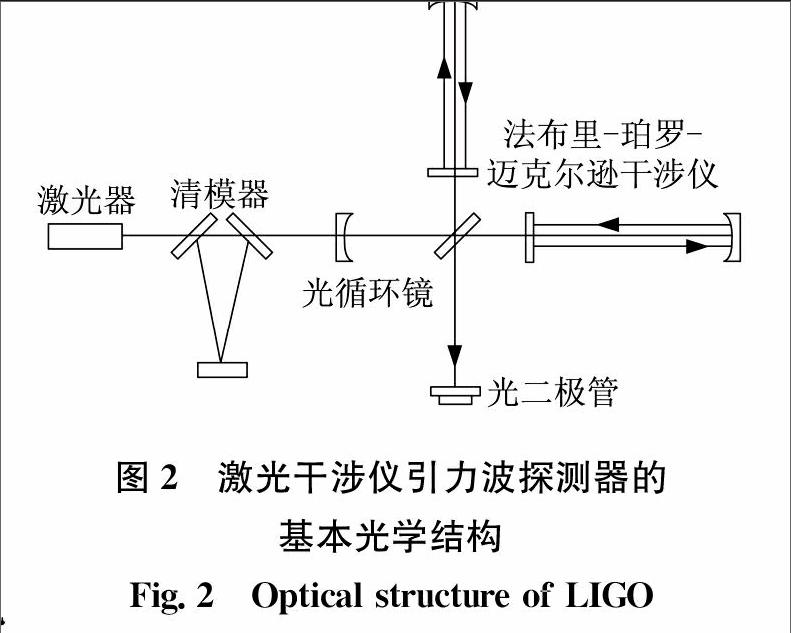
激光干涉仪引力波探测器是一种大型综合性实验装置,由光学部分、机械部分、信号转换部分和控制部分等组成。本质上讲,它应该是一台超大型高精度的光学仪器,其光学部分的主体结构如图2 所示,包括迈克尔逊干涉仪、法布里珀罗腔、光循环镜、频率调制器、光隔离器、波片、信号引出系统(后4项图中未绘出)等。现就主要光学部分进行介绍。
2.1 激光器
激光器是激光干涉仪引力波探测器的光源[2],用于引力波探测的干涉仪对光源有如下要求:
(1) 高输出功率和好的功率稳定性
激光功率涨落产生的霰弹噪声是影响激光干涉仪引力波探测器灵敏度的主要噪声之一,其大小为
式中:L为干涉仪臂长;h为普朗克常量;c为光速;λ为波长;Pin为输入功率。增加激光Pin,可使霰弹噪声压低。一般要求激光器的输出功率为十几瓦(初级探测器)到两百瓦左右(高级探测器),输出功率不但要大,还要有好的稳定性,因为输出光束强度的涨落会影响暗纹工作点锁定位置的剩余涨落,从而影响干涉仪的灵敏度,对于激光干涉仪引力波探测器来说要求功率稳定性至少应达到δP/P=10-7。
(2) 单一的振动频率和高的频率稳定性
为使激光干涉仪引力波探测器能够稳定地锁定在需要的工作点上,要求激光器输出的光束具有单一的振动频率。激光频率涨落引起的噪声是影响干涉仪灵敏度最严重的噪声之一,我们称此噪声为干涉仪的频率噪声,必须尽量减小。
(3) 输出光束光斑的横截面是纯净的TEM00模式。
(4) 线性偏振。
(5) 内在噪声低。
激光干涉仪引力波探测器所用的大功率稳频激光器大多数是注入锁频激光器。即用一个稳定的低噪声主激光器,注入、锁定一个高功率从属激光器。
2.2 清模器
激光干涉仪引力波探测器要求激光束的横向剖面具有纯净的TEM00模式,即应该是基模厄米高斯模式。因为高阶模式与干涉仪的不对称性相耦合,会使输出信号的对比度变差,而且高阶模式会使法布里珀罗腔镜子表面光强分布改变,产生附加的热噪声。高阶模式的振幅是不稳定的,它会使镜子不同部位受到的辐射压力发生变化,产生附加的辐射压力噪声,严重时会使镜子抖动引起干涉仪锁定状态的不稳定。通过清模器可以清除高阶横向模式,清模器的主体部分是一个具有较高透射率的行波谐振腔,常采用由三面光学镜组成的锐三角形结构,其优点是清模效果好,光束抖动噪声小,能选择偏振形式,具有高的频率稳定性,没有光从清模器返回激光器。合理设计三面镜子的反射和透射系数并适当调节锐角上的镜子,使载频激光和两个旁频都能共振通过。
2.3 功率循环镜
从3.2节中我们知道,在激光干涉仪引力波探测器中要尽可能地使用高激光功率,使用功率循环技术[3]。可以有效地做到这一点,其基本的想法是把从干涉仪亮口射出来的光重新收集起来,再注入干涉仪中,进行循环利用。因为激光干涉仪引力波探测器的工作点选择在暗纹条件,如果干涉仪内的光损耗很小,几乎所有的入射光功率都会经载频口射出,这是极大的浪费。在激光器和分光镜之间放上一面镜子,就能实现光能的回收。这面镜子称为功率循环镜,它把这部分漏出的光与从激光器来的新鲜光混合,一起注入到干涉仪内,则干涉仪内的有效功率将大大增加。
功率循环镜的置入等于在干涉仪上又组成了一个法布里珀罗腔。腔的一个端镜是功率循环镜,另一面端镜是把整个干涉仪等效成的一个复合镜。我们称这个法布里珀罗腔为“功率循环腔”,设循环腔内的功率增益为G,不考虑循环镜的功率损耗时有
2.4 法布里珀罗腔
在迈克尔逊干涉仪中,引力波引起的相位变化与臂长L成正比,臂长越大,相位变化越大。这种正比关系直到臂长增大到引力波波长的四分之一时都成立,此时光在臂中往返一次的时间等于引力波的半个周期。例如,对于频率为100 Hz的引力波来说,为了获得最佳探测效果,根据计算,迈克尔逊干涉仪的臂长应为75 km。在地球上建造这么大尺度的干涉仪是不可能的。能否把迈克尔逊干涉仪的臂折叠起来,使光在其中的行程达到对引力波的最佳探测效果,而折叠后的长度又合适,使我们有可能在地球上建造它,维修它?这种技术是有的,那就是在臂上使用法布里珀罗腔[4]。
法布里珀罗腔由前后两面镜子组成,入射的激光束在腔内多次来回反射,发生共正振。法布里珀罗腔光的输入/输出关系如图3所示。
图中L为腔的长度,a0表示入射光的电场振幅,a1为透过输入镜进入腔内的光的电场振幅,a′1是腔内从输入镜自由传播到终端镜后的电场振幅,a2是腔内光场透过终端镜出射的光的电场振幅,a3是a′1经终端镜反射后的电场振幅,a′3是反向自由传播后输入镜的光的电场振幅,a4是腔内的光透过输入镜射出腔外的光的电场振幅。设输入镜的反射和透射系数分别为r1和t1,终端镜的反射和透射系数分别为r2和t2,则
光强的反射系数R和透射系数T是振幅反射透射系数的平方,即R=r2且T=t2。在单独考虑纵模时,若外部输入激光波长λ和腔长L满足λ=2L/n(n是任意正整数),激光会在腔内发生谐振,此时腔内积累的光功率达到最高,从腔的后端镜透射出来的光强也最强。当频率不满足上述关系时,腔内积累的光功率急剧下降,腔后基本没有光透出来。腔内能谐振的激光纵模频率是c/(2L)的整数倍,这一纵模之间的频率差又称之为自由光谱范围法布里珀罗腔的频带宽,它是谐振峰值的半高度处的全宽度,即向低频和高频分别移动输入光的频率,当腔内光功率达到最大腔内功率一半时,这两个频率之差。表示法布里珀罗腔损耗大小的量叫做腔的锐度,锐度的物理意义为:当腔内谐振功率达到最大时突然切断输入光源,原来积累在腔内的光会慢慢透射出来。锐度表征这一过程的耗时长短。腔的锐度越高,所需要的时间越长,也就是说,腔内能积累的功率也越高。
3 光干涉仪引力波探测器中的光学镜
激光干涉仪引力波探测器对光学镜特别是分光镜,功率循环镜及两臂上法布里珀罗腔所用的四面镜子有十分严格甚至近于苛刻的要求,其材料的选取及制造工艺的高低直接影响干涉仪的灵敏度和稳定性。
3.1 测试质量的结构
(1) 镜子结构
激光干涉仪的测试质量是由镜子本身和反冲质量组成的复合体。这个复合体是将镜子的一部分嵌在一个与其质量相等的反冲质量体内做成的。镜子和反冲质量两者的纵轴要重合,镜体的背面分布着四个永磁体做成的针,而相应的线圈固定在反冲质量体与其相对的面上。针伸入对应的线圈内,组成磁铁线圈驱动器。这四组磁铁线圈驱动器用来调整和控制镜体的方向和位置。
(2) 光杠杆
在激光干涉仪引力波探测器运行过程中,需要使用光杠杆对测试质量的状态进行实时控制,使干涉仪稳定地保持锁定状态。光杠杆的工作原理如下:
当干涉仪调整到初始工作状态并锁定之后,从激光器来的一束光射到镜子背面选定的一个灵敏点上,经过反射后进入到一个多单元光探测器内,输出一个确定的信号。当镜子的角度偶然发生变动时,反射光束就入射到多单元光探测器的不同位置上,输出一个位置误差信号。该位置误差信号经放大成形后输入到一个自动控制系统,驱动设在镜子背面相应的驱动装置,使镜子复原。由于激光器到镜子的距离远小于光探测器到镜子的距离,在光探测器所处的位置上,反射光斑的位移会很大。因其作用类似于力学中的杠杆,故得其名。
3.2 激光干涉仪引力波探测器对光学镜的要求
(1) 体积和重量
激光干涉仪引力波探测器的臂长一般为千米量级,由于光束传播过程中的发散,光斑变大。为了避免边缘效应光学镜的直径都比较大,如LIGO镜子的直径是25 cm。由于辐射压力噪声与镜子的质量成反比,为了降低这种噪声提高干涉仪的灵敏度,镜子的质量一般为20 kg左右。
(2)热传导及热噪声
当激光干涉仪引力波探测器运行时,臂上法布里珀罗腔内的激光功率非常强,例如高级LIGO达到800 kW以上,因此,镜子要有很好的散热性,而且镜子内部不能有结构上的缺陷。为减小由于局部发热而产生的热噪声和避免镜面的热损伤,镜子材料一般为熔硅。
(3) 镀膜
镀膜对激光干涉仪引力波探测器的光学镜来说至关重要。分光镜要把入射光分成强度严格相等的两束,功率循环镜的反射系数要与等效复合镜的反射系数相匹配,臂上法布里珀罗腔总反射和总透射系数,腔的锐度,频带宽度,光贮存时间等参数无一不与镀膜息息相关。为了达到需要的数值,需要使用不同材料进行多层镀膜。由于膜的厚度要均匀,膜材料的导热性能要好,因此镀膜工艺及膜厚度测量非常复杂和困难。
3.3 镜子参数测量
引力波探测工程中对光学元件的要求极为严格,因此常规的检测方法难以对其测量。光学元件的主要测量指标为面形精度和曲率半径,一般使用激光干涉仪检测,主流的激光干涉仪对面型的检测精度为PV值小于λ/20,并且曲率半径的测量范围有限。而LIGO中的光学元件面型精度要求到达PV值小于λ/100,RMS值小于λ/1 000,曲率半径估算为6 km,要求测量的半径误差小于3%。针对极其苛刻的测量指标,Vecoo公司专门设计了1.064 μm干涉仪,测量半径范围5.5~14.5 km,有效口径大于150 mm,光学元件的反射率范围为4%~99.9%。
为了精确测量光学元件的曲率半径,离焦和象散的残差PV值必需精确到λ/100,它们的大小由全口径测量的泽尼克系数决定,去除离焦和象散项,RMS残留误差必须小于λ/1 000。回程误差是指没有条纹和n个条纹的光程差,LIGO干涉臂中的共振腔内光学平板在4个倾斜条纹下PV值小于6 nm。在测试光学平板表面时需要排除零条纹模式,通过软件进行光线追迹可以对回程误差建模,但必要时需对回程误差进行测量并去除。
干涉仪对面型精度的测量是使用精度很高参考镜对样品测量,测量精度取决于参考镜的精度,但参考镜的精度很难达到PV值λ/100。为了达到测量精度,使用三平板绝对测量法,使用一个平板作为一个测试面,使用偶次和奇数函数的办法测量三个未知和一个已知的参考镜,进行两次独立的三平板测量,其中一个平板在两次测量中都使用。在两次测量之间比较通用表面的计算结果。面型的PV值可由泽尼克系数表示,相同表面的独立测量,离焦系数PV值差异小于10 nm,象散系数使用相同的步骤,除去离焦和象散后,剩余RMS值小于1 nm。
LIGO工程中大曲率半径光学元件的曲率半径最终测量结果为5.84 km,5.85 km,5.87 km,与预期值6 km相比,误差在3%以内。
4 结束语
作为一种大型的精密光学仪器并作为引力波天文学研究的关键设备,激光干涉仪引力波探测器已在世界各地蓬勃发展起来,开辟了引力波探测的新时代。20世纪80年代,数十台小型干涉仪陆续兴建,作了大量的基础研究,灵敏度提高了几个数量级。到21世纪初,几台大型激光干涉仪相继建成并投入运转,它们是:位于美国华盛顿州的LIGO(LHO)和位于路易斯安娜州的LIGO(LLO),臂长4 km[5];位于德国汉诺威由英国和德国合建的GEO600,臂长600 m[6];位于意大利比萨附近由法国和意大利合建的VIRGO,臂长3 km[7];位于日本东京国家天文台内的TAMA300,臂长300 m[8];位于澳大利亚珀斯附近的AIGO,臂长80 m。这些大型干涉仪的灵敏度达到了10-22HZ-12被称为第一代激光干涉仪引力波探测器。当前,采用新材料、新技术、新工艺的第二代激光干涉仪正在紧张地建造之中,灵敏度为10-23HZ-12,它们是:高级LIGO两台[9],高级VIRGO,GEO高频,位于日本深冈臂长3 km的KAGRA及由美国和印度合建的INDIGO,臂长为4 km。在第二代干涉仪紧张建造的同时,以爱因斯坦引力波望远镜[10]为代表的第三代激光干涉仪引力波探测器也开始筹划,臂长10 km,采用三角形结构,建在地下,灵敏度直指10-24HZ-12,目标是建设引力波天文台,当前已完成第一阶段的可行性研究。我们知道,灵敏度提高一个数量级,可探测的引力波源的数量就扩大1 000倍。随着第三代激光干涉仪引力波探测器的建立,人类必将进入引力波天文学蓬勃发展的新时代。
参考文献:
[1] ABRAMOVICI A,ALTHOUSE W E,DREVER R W P,et al.LIGO: The laser interferometer gravitational-wave observatory [J].Science,1992,256:325-333.
[2] MOSS G E,MILLER L R,FORWARD R L.Photon-noise-limited laser transducer for gravitational antenna[J].Applied Optics,1971, 10: 2495-2498.
[3] ABBOTT B P,ABBOTT R,ADHIKARI R,et al.LIGO:the laser interferometer gravitational-wave observatory[J].Reports on Progress in Physics,2009,72:1-25 .
[4] ABADIE J,ABBOTT B P,Abbott R,et al.Predictions for the rates of compact binary coalescences observable by ground-based gravitational-wave detectors[J].Classical and Quantum Gravity,2010,27:173001.
[5] FAIRHURST S.Source localization with an advanced gravitational wave detector network[J].Classical and Quantum Gravity,2011,28:105021.
[6] WILLKE B.GEO600:status and plans[J].Classical and Quantum Gravity,2007,24:S389.
[7] ACERNESE F,AMICO P,ALSHOURBAGY M,et al.Status of Virgo detector[J].Classical and Quantum Gravity,2007,24:S381.
[8] REGIMBAU T.The astrophysical gravitational wave stochastic background[J].Research in Astron.Astrophys,2011,11:369390.
[9] HARRY G M.Advanced LIGO:the next generation of gravitational wave detectors[J].Classical and Quantum Gravity,2010,27:084006.
[10] LIGO Scientific Collaboration & Virgo Collaboration,ABBOTT B P,ABBOTT R,et al.An upper limit on the stochastic gravitational-wave background of cosmological origin[J].Nature,2009,460(7258):990-4.
(编辑:刘铁英)
猜你喜欢
建筑机械化(2023年9期)2023-10-31
九江学院学报(自然科学版)(2022年2期)2022-07-02
计测技术(2020年6期)2020-06-09
现代装饰(2020年4期)2020-05-20
百科探秘·航空航天(2020年12期)2020-01-22
航天电子对抗(2019年4期)2019-06-02
制导与引信(2017年3期)2017-11-02
现代丝绸科学与技术(2016年6期)2017-01-04
科学大众(中学)(2016年9期)2016-12-29
装备制造技术(2016年5期)2016-09-10