同轴数字全息术在大气可吸入颗粒物PM2.5测量中的应用
2015-09-24 03:41王萍
光学仪器 2015年4期
王萍

摘要: 讨论了同轴数字全息术测量PM2.5大气可吸入颗粒物的可行性,并设计了一套针对PM2.5颗粒测量的同轴数字全息实验装置。在讨论同轴全息图的数字图像处理方法基础上,利用所设计的装置测量了与PM2.5颗粒粒径相当的标准粒子,对实验结果进行了分析和讨论。实验证明,同轴数字全息术可有效应用于PM2.5颗粒的测量与分析。
关键词: 同轴数字全息术; 可吸入颗粒物PM2.5; 大气污染
中图分类号: O438.1 文献标志码: A doi: 10.3969/j.issn.10055630.2015.04.002
Abstract: In this paper, the feasibility to measure PM2.5 by using inline digital holography is discussed and a corresponding experimental setup is designed. The setup is used in the measurement of standard particles which have approximate diameters with PM2.5. The experimental results are discussed and analyzed too. The results show that inline digital holography can be effectively applied to the measurement of PM2.5.
Keywords: inline digital holography; respirable particulate matter PM2.5; atmospheric pollution
引 言
大气中直径小于等于2.5 μm的颗粒物称为可吸入颗粒物,科学家用PM2.5表示每立方米空气中这种颗粒的含量,这个值越高就代表空气污染越严重,因而对人体健康、空气质量和能见度等影响也越大。
准确测定PM2.5粒子的浓度对于生产、生活和环境保护具有重要的意义和作用。针对PM2.5监测技术,目前已经发展出不同的检测方法,如震荡天平法、β射线法以及光散射法等。然而,无论是借助锥形振荡管频率变化测量颗粒物浓度的振荡天平法,还是基于β射线吸收原理的β射线法,亦或是测量尘粒在光照下的散射光变化的光散射法,都存在受空气湿度影响大、滤膜成本高、仪器重新校准以及操作维护工作繁琐等问题。除上述PM2.5的测量方法以外,同轴数字全息术是一种测量大气可吸入颗粒物PM2.5的有效方法[1-5]。
关于同轴数字全息术,Murata 等最早讨论了同轴数字全息技术应用于粒子场测量的可能性[6]。之后,Owen 等利用该方法研究了海洋中的粒子流动情况[7],而GarciaSucerquia等和Satake等分别将特殊的光路系统或显微物镜引入同轴数字全息术中[89]。随后,Gao 等利用脉冲激光测量了粒子的直径、位移、速度等信息[10]。在上述研究基础上,本文设计了一套针对PM2.5颗粒测量的同轴数字全息实验装置,利用该装置测量与PM2.5颗粒粒径相当的标准粒子,并对实验结果进行分析和讨论。
1 测量原理及装置
1.1 同轴数字全息原理
在同轴数字全息术中,激光束经细颗粒物衍射后与未受到干扰的背景光波发生干涉,形成同轴全息图,并用CCD相机记录下来,经计算机数值模拟光波的衍射再现过程对同轴全息图进行数值重建,可实现待测细颗粒物场的分层聚焦,实时获取和测量具有较大景深范围的细颗粒物场。同轴全息图记录过程中,假设物光波为O(x,y),参考光波为R(x,y),则全息图的强度分布为
式中前2项分别是参考光波和物光波的强度分布,对应再现像的零级和背景噪声,后2项分别对应实像和共轭虚像。同轴全息图再现过程中,因为物光波和参考光波同轴,其再现像叠加在一起,不能分开,伴随的虚像会使再现像质量降低。但当对实像聚焦时,虚像离焦,对再现像的强度分布影响不大。同时,全息图记录了物体的空间位置信息,再现过程中可以控制全息图的再现距离,获得物体在不同空间位置处的信息。因此,同轴数字全息术特别适合用于PM2.5等颗粒物的场分布测量,通过全息图的分层聚焦,可以实时获取粒子的粒径、空间分布、运动速度等信息[6-7]。
1.2 同轴数字全息实验系统
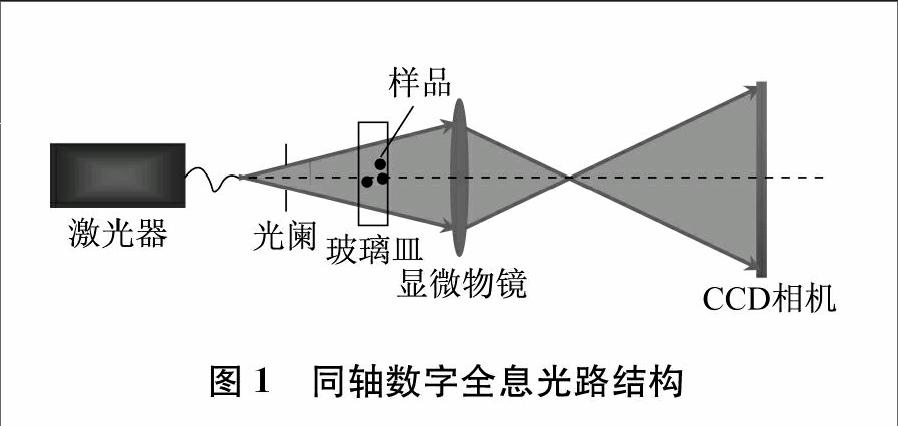
用于PM2.5测量的同轴数字全息实验系统如图1所示,激光器发出的光束经光纤耦合输出后形成发散光束,经光阑滤波后照射置于玻璃皿中的待测样品。待测样品的散射光波与未受到干扰的背景光波发生干涉,经显微物镜成像后在CCD相机靶面得到同轴全息图,再经过后续的计算机处理便获得待测量样品信息。激光器为波长640 nm的半导体激光器,显微物镜放大倍率为20×,CCD像素数为1 280×960,像素尺寸为4.65 μm×4.65 μm,与显微物镜之间距离为160 mm。待测样品为标准颗粒,盛于厚度为5 mm的玻璃皿中,并放置于光路中。测量过程中,玻璃皿中颗粒物的浓度不宜过高,若颗粒物浓度过高,则不受干扰而穿过样品的激光束太少,导致最终CCD相机记录的全息图噪声过大,影响测量效果。
1.3 实验数据处理
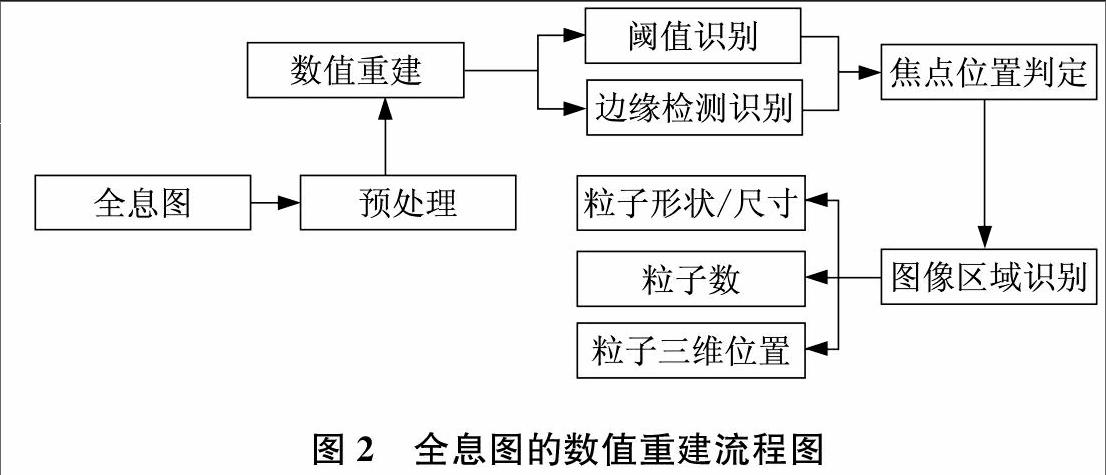
利用同轴数字全息术测量PM2.5时,全息图的数值重建过程中需要一些特殊的数字图像处理技术。图2所示是全息图数值重建的流程图,包括全息图的预处理、粒子阈值或边缘检测识别、粒子焦点位置定位、图像区域识别、粒子形状与尺寸识别、粒子数统计、粒子三维测量等流程。经过上述流程后最终可以计算获得粒子的直径、空间位置和速度场等信息。
全息图的预处理主要是引入高低通滤波或者中值滤波,对同轴数字全息图进行预操作,以降低零级像的干扰和散斑噪声,提高数值再现像质量;阈值或边缘检测识别主要是在全息像数值重建时,使聚焦位置处粒子比较清晰,即借助阈值或者Canny边缘检测手段将粒子从其背景中分离出来;粒子焦点位置判定主要是在沿光轴方向获得一系列粒子再现像的过程中,通过粒子聚焦时灰度最小来判定其位置;最终在以上基础上即可以获得粒子尺寸、粒子数及其三维分布情况[11-13]。
图3为直径10 μm的标准聚合物粒子的同轴全息图,其中图3(a)是粒子的数字全息图,粒子的衍射环分布清晰,参考光波背景均匀,全息图质量较好。图3(b)和(c)分别为此全息图的数值再现像和局部放大像,从图3(c)强度再现像的局部放大像可以看出,图中间位置粒子的聚焦像非常清晰,同时其周围背景明亮,因此,可以很容易地借助数字图像处理手段获得中间聚焦粒子的位置、直径等信息。但是,如果全息图的质量不好,则会严重影响其再现像,使粒子的聚焦像与其背景混淆不清。为了提高后续粒子场测量结果的准确性,图2中所述的全息图的预处理、粒子阈值或边缘检测识别、粒子焦点位置定位和图像区域识别等手段就非常必要。
图4所示即为图3中粒子的数字全息图经过图2中一系列的处理手段之后的结果,其中图4(a)中标注出了图3(a)中粒子场的全息图经过图像处理之后所确定的所有粒子,一共有13个粒子被识别出来,并且已用序号在图中标明。当确定某一粒子的轴向位置,即
其在沿光轴方向聚焦时,使用图像区域识别与测量算法,即可以获得针对某一具体空间位置粒子的直径、长短轴等信息。对识别得到的全部粒子进行处理,即可以得到所有粒子的尺寸、形状与三维分布信息。图4(a)中所得到的13个粒子的空间位置与直径信息见表1,其中,x位置和y位置单位为pixel,z位置是数值重建距离,其与直径的单位均为μm。图4(b)和(c)分别是测量得到的粒子直径分布的直方图和粒子的空间三维位置示意图。
由此可见,同轴数字全息术是一种测量微小粒子的有效方法。以直径为10 μm的标准粒子为例,通过这一方法我们不仅可以获得其粒径信息,同时还可以得到某一时刻粒子在空间的位置分布信息,利用该方法可以对PM2.5粒子进行测量。
2 PM2.5测量的实验结果及分析
为了验证这一方法在不同粒子尺寸测量中的可靠性,分别利用直径为5 μm和1 μm的标准聚合物粒子进行了模拟实验。
对于直径为5 μm的标准粒子而言,由于其直径相对较小,为了提高测量的准确性,分别选取放大倍数为10×和20×的显微物镜进行测量,其中,20×显微物镜的焦距为9 mm,与CCD靶面的距离为187.9 mm。图5(a)和(c)分别给出了使用10×和20×显微物镜所记录的同轴数字全息图,两幅图因为显微物镜放大倍率不同,衍射环的尺寸存在差异。为了更准确地测量粒子直径,分别使用10×和20×显微物镜记录了15和13幅全息图。经过全息图数值重建和图像处理,分别识别出667个和536个粒子。图5(b)和(d)分别为使用不同倍率显微物镜测量得到的粒子直径分布,分别为5.130 μm±0.100 μm 和5.070 μm±0.500 μm,与粒子标称直径5.003 μm±0.040 μm相比,测量误差为2.54% 和 1.34%。
对于直径1 μm的标准粒子而言,实验系统中需要选择放大倍率更高的显微物镜,例如40×或者60×,用以放大并记录同轴粒子场全息图。实验中所选用的40×或者60×显微物镜的焦距分别为4.5 mm和 2.9 mm,与CCD靶面的距离分别为183.0 mm和179.1 mm,由此得到相应的系统放大率分别为39.66 和 60.76。同时,因为系统的放大倍率提高,其测量视场分别降低为0.150 mm×0.113 mm和0.098 mm×0.073 mm,像素分辨率分别降低为0.117 μm和0.076 μm,所以更适合小尺寸粒子测量。图6为用不同放大倍率的显微物镜测得的结果。
图6(a)给出了使用40×显微物镜测量直径1 μm粒子时获得的同轴全息图。因为系统的放大率较高,其数值孔径和空间带宽积较小,与图5相比,图6(a)中全息图的噪声较多,所以粒子的衍射环比较模糊。实验中共记录了20幅全息图,数值重建处理后得到1 015个粒子,其二维和三维分布如图6(b)和(c)所示。对所有粒子进行分析后,可以得到粒子的直径分布为1.050 μm±0.030 μm,如图6(d)所示,与粒子的标称直径1.034 μm±0.020 μm相比,测量误差约为1.55%。当使用60×显微物镜对此直径1 μm粒子进行测量时,其同轴全息图和直径分布如图6(e)和(f)所示,直径的测量值为1.050 μm±0.020 μm,误差为1.55%。
3 结 论
本文对同轴数字全息术测量PM2.5大气可吸入颗粒物的可行性进行了讨论,在此基础上设计了一套针对PM2.5颗粒测量的同轴数字全息实验装置,并对同轴全息图的数字图像处理方法进行了讨论。最终利用所设计的同轴数字全息装置测量了与PM2.5颗粒粒径相当的标准粒子,并对实验结果进行了分析和讨论。实验证明,同轴数字全息术是一种测量PM2.5颗粒的有效方法。
参考文献:
[1] 张盛华.美国RP公司微量振荡天平测尘仪与法国ESA公司MP101Mβ射线测尘仪的比较[J].仪器仪表与分析监测 2008(1):34-36.
[2] 陆钒,刘建国,陆亦怀,等.基于振荡天平技术的大气颗粒物 PM10浓度连续监测系统设计[J].大气与环境光学学报,2007,2(5):361-365.
[3] 姜峰.β射线法和振荡天平法在监测中的应用[J].辽宁城乡环境科技,2005,25(5):16-17.
[4] 涂桥,于瀛洁,周文静.基于旋转毛玻璃片的全息系统去噪处理[J].光学仪器,2014,36(4):337-341.
[5] 刘惠萍,于佳,于丽,等.傅里叶变换数字全息图的记录与再现及实时化研究[J].光学仪器,2013,35(5):32-35.
[6] MURATA S,YASUDA N.Potential of digital holography in particle measurement[J].Optics and Laser Technology,2000,32(7/8):567-574.
[7] OWEN R B,ZOZULYA A A. In-line digital holographic sensor for monitoring and characterizing marine particulates[J].Optical Engineering,2000, 39(8): 2187-2197.
[8] GARCIA-SUCERQUIA J, XU W B, JERICHO S K, et al.Digital in-line holographic microscopy[J]. Applied Optics, 2006, 45(5): 836-850.
[9] SATAKE S I, KANAMORI H, KUNUGI T, et al.Parallel computing of a digital hologram and particle searching for microdigital-holographic particle-tracking velocimetry[J].Applied Optics, 2007, 46(4): 538-543.
[10] GAO H W,SUN C D,QIN J J.Particle size, displacement, and velocity measurements with pulsed-laser holography[J].Advanced Laser Technologies,2005:3442-3442.
[11] GARCIA-SUCERQUIA J, XU W B, JERICHO M H, et al.Immersion digital in-line holographic microscopy[J]. Optics Letters, 2006, 31(9): 1211-1213.
[12] PAN G,MENG H.Digital holography of particle fields: reconstruction by use of complex amplitude[J].Applied Optics, 2003, 42(5):827-833.
[13] FOURNIER C, DUCOTTER C,FOURNEL T.Digital in-line holography: influence of the reconstruction function onthe axial profile of a reconstructed particle image[J]. Measurement Science and Technology, 2004, 15(4): 686-693.
(编辑:刘铁英)
猜你喜欢
科普童话·学霸日记(2021年11期)2021-05-30
家庭影院技术(2021年3期)2021-05-21
冶金设备(2019年6期)2019-12-25
制造技术与机床(2018年8期)2018-10-09
光学精密工程(2016年4期)2016-11-07
光学精密工程(2016年3期)2016-11-07
发明与创新(2015年34期)2015-02-27
河南科技(2014年8期)2014-02-27
电子工业专用设备(2012年12期)2012-09-16
物理与工程(2010年2期)2010-03-25