
基于CAN总线的车载称重系统的仿真开发及实现
2015-09-23 10:49柳东亮符丹丹陕西重型汽车有限公司陕西西安710200
汽车实用技术 2015年12期
柳东亮,符丹丹(陕西重型汽车有限公司,陕西 西安 710200)
基于CAN总线的车载称重系统的仿真开发及实现
柳东亮,符丹丹
(陕西重型汽车有限公司,陕西 西安 710200)
文章所介绍的车载称重系统用于重型卡车,采用CAN总线模块,符合SAE J1939协议,在前期的开发过程中,为了验证开发效果,使用CANoe软件,采用CAPL语言,实现功能仿真,创建Panel界面,观察仿真结果稳定,并能满足初期设计要求。
CANoe;仿真;CAPL;车载称重系统
10.16638/j.cnki.1671-7988.2015.12.023
CLC NO.: U463.9Document Code: AArticle ID: 1671-7988(2015)12-65-02
引言
随着我国市场经济的发展,公路交通量迅速发展,重型卡车的使用量逐年增长,部分运输单位或个人不顾车辆及道路的承载能力,行车安全意识薄弱,擅自增加车辆栏板,严重超载,对车辆本身及公路都造成了严重的损害。因此,为了维护国家的财产安全及行车安全,严格限制车辆超载已迫在眉睫。车载称重系统已广泛应用于载货车,本文介绍的车载称重系统,可以在行车过程中自动测量整车重量,根据用户的使用需求,可自主选择是否需要显示重量。
1、系统介绍
车桥的变化量,控制器采用飞思卡尔MCU,具有CAN信号收发功能,采集传感器的信号和整车信号进行处理,输出货物重量 CAN信号给整车,显示系统可以使用整车仪表,也可以使用其他显示屏,显示系统要求必须具有CAN信号收发功能。

图1 系统组成
2、系统方案设计
2.1传感器的选择和安装方案
当在车厢内装载货物时,车轴和车桥受力发生变形,这种变形会随货物重量的增大而增大,并呈一一对应的关系。总体技术方案的原理就是:基于这种一一对应的关系,选择
本系统主要包含三部分,传感器、控制器和显示系统,如图1所示。传感器采用应变片式传感器,每个车桥上安装两个传感器,以6×4载货车为例,需安装6个传感器来检测应变式电阻传感器,该传感器由电阻应变片和弹性敏感元件组成,工作原理:将应变片粘贴在各种弹性敏感元件上,当弹性敏感元件感受到外力、位移、加速度等参数的作用时,弹性敏感元件产生应变、再通过粘贴在上面的电阻应变片将其转换成电阻的变化[1],传感器测量电路如图2所示:
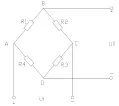
图2 电阻传感器测量电路
通过实验所得,需在图3、图4所示位置安装传感器,通过测量车轴和车桥的变形来求得所装载的货物质量。
2.2控制器数据处理

图3 车轴安装位置
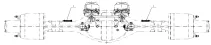
图4 车桥安装位置
以前轴为例具体说明工作原理[2],传感器分别测量如图4所示的P1与P2、P3与P4的在垂直方向的相对变形,并将这种变形通过传感器和控制器转变为数字信号 ni(i=1、2、3……),通过标定和计算的方式找出各传感器输出信号ni(i=1、2、3……)与货物质量W货之间的关系,即确定各传感器的分配系数si(i=1、2、3……),用下列算式计算货物总质量:

通过标定采得的数据进行数据处理求得分配系统S。
由于传感器灵敏度较高,在行车和停车状态下,传感器的变化量较大,所以控制器需要接收整车的车速信号、转速等信号进行动静态区分,需采用不同的滤波深度进行信号处理。控制器将处理完的货物重量数据按照 CAN信号定义发送至CAN总线。
控制器可以做一些报警信号:货物丢失报警,当在行车过程中,突然出现货物重量变小,发送总线报警信号,接收设备接收后提示司机货物丢失;传感器检测的是桥的应变量,当桥的应变量变化超过桥正常的应变量时,及时发送报警信号,提示司机注意安全;该系统通过与网络后台通讯,可以实时记录车辆的运输状况,方便进行车队管理。
2.3显示系统
显示系统必须具有 CAN总线收发功能,可以接收控制器发送的CAN信号,通过液晶显示货物重量,当重量超过设定值时可以进行声光报警。也可通过远程终端将数据传递至网络后台进行监控[3]。
由于传感器存在温漂、零点漂移等问题,所以需设置一个按键进行置零操作,建议将该按键放于仪表上,称重控制器内部标定一个参数,在该数字范围内可以进行置零操作,点击称重置零操作,仪表通过CAN线发送置零操作给控制器,控制器接收后根据内部标定的数字判断是否可以进行置零操作,置零操作成功发送反馈信号仪表显示“置零操作成功”,如不能操作也通过CAN线发送给仪表,仪表显示“置零失败”。
3、系统仿真验证
由于传感器采集的数据有很多随机信号,随机信号可以认为是一个静态信号与诸多不同频率、不同幅值的正弦信号叠加的结果。该静态信号就是车辆静态时对应于装载货物的信号。获取静态信号的方法如下:对6个传感器原始信号进行傅里叶变化,将时域信号转变为频域信号;采用低通滤波的方法得到静态信号;以此信号作为稳态信号,称重数值为处理后数据后求和的数值[4]。 现对实际采集的数据进行仿真验证如图5所示:
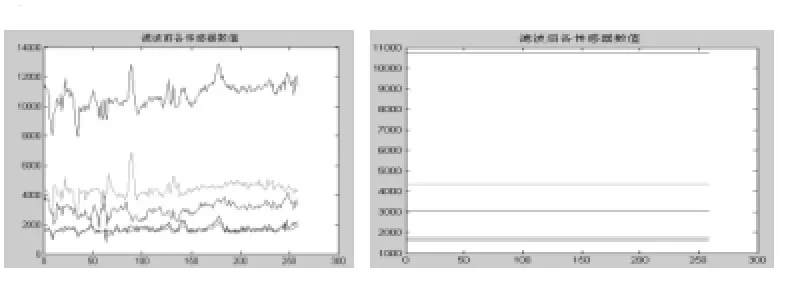
图5 数据处理前后对比
4、系统实现
将该套系统装与6×4自卸车,标定完成后将分配系数刷写至控制器,然后对车辆装沙后进行实际称重,重量显示见图6∶35690kg,整车重量为16350kg,磅秤称得实际装沙量为19340kg,车载称重系统显示19004kg,相对误差1.7%。

图6 磅秤显示
5、结束语
基于CAN总线的车载称重系统,通过仿真验证和实际试验验证,该系统的设计方案可行,且在行车和停车全过程中,误差均可保持在3% 以内,满足设计要求,可以有效的监测到超重,运行中货物丢失等问题。
[1] 余成波.传感器与自动化监测技术[M].北京:高等教育出版社, 2004.
[2] 李朝青.单片机原理与接口技术[M].北京:北京航空航天大学出版社,1994.
[3] 何立民.单片机应用程序设计技术[M].北京:北京航空航天大学出版社,2002.
[4] 吴哲辉.算法设计与分析[M].北京:煤炭工业出版社,1993.
The On-board Weighing System Based On CAN Bus Simulation Development
and Implementation
Liu Dongliang, Fu Dandan
( Shaanxi Heavy-Duty Automobile Co., Ltd., Shaanxi Xi'an 710200 )
In this paper, the vehicle weighing system is used for heavy duty truck, use CAN bus module, SAE J1939 protocol. In order to validate the development effect, use CANoe software, use CAPL language, realize the function simulation, create Panel interface, observe the simulation results and meet the requirements of the initial design.
CANoe; simulation; CAPL; automatic weighing system
U463.9
A
1671-7988(2015)12-65-02
柳东亮,就职于陕西重型汽车有限公司。
猜你喜欢
汽车与新动力(2022年2期)2022-07-21
网络安全与数据管理(2022年2期)2022-05-23
汽车电器(2021年8期)2021-08-24
汽车电器(2021年7期)2021-08-04
科学家(2021年24期)2021-04-25
专用汽车(2020年10期)2020-10-26
汽车维修与保养(2020年11期)2020-06-09
智富时代(2019年2期)2019-04-18
智富时代(2019年2期)2019-04-18
科学与财富(2018年18期)2018-08-09
