城市空间形态与空间体验的耦合性
2015-09-17 06:54:48李欣
东南大学学报(自然科学版) 2015年6期
关键词:视域
李 欣
(武汉大学城市设计学院,武汉 430072)
城市空间形态与空间体验的耦合性
李 欣
(武汉大学城市设计学院,武汉 430072)
摘 要:通过数据模型和实证检验,采用信息辅助分析技术研究城市空间形态与空间体验的关联耦合作用.通过对13组受试者的情绪数据和GPS信息进行采集,利用空间聚类分析和热点分析确定具有显著统计学意义的有效采样点,在此基础上对其视域范围内的建筑形态指标、视域参数、视觉熵、分形维数进行了多角度研究.结果表明,空间体验受上述多种因素的综合影响,运用Logistic模型和接受者工作特性曲线(ROC)可确定关键的视域参数,模型具有较高的预测准确性.空间节点对空间体验也具有一定的影响,主要反映在空间序列以及场景转换的作用机制方面.最后,对城市空间的优化提出建议,应加强城市空间的连续性与网络化建设,指出建设与管理并重的重要性,打造宜人的城市空间.
关键词:城市空间形态;空间体验;视域;逻辑回归
城市空间作为人们赖以生存的载体,与人们的工作和生活息息相关.研究发现,视觉因素在诸多影响城市空间品质的因素中占据极其重要的地位.Hillier[1]认为城市的空间网络及其可视性对于人流分布具有显著的影响.一些学者对开阔度[2]、方向性[3-4]、复杂度[5]等空间因素进行了量化计算和研究,试图了解人们如何通过这些空间属性感知城市外部空间环境[6-7].近年来,随着科技的发展,信息技术与计算机辅助分析逐渐被引入城市规划与设计相关领域之中,为综合分析城市空间环境提供了便利.Koenig等[8]利用智能手环对在城市中的行人进行了情绪测试,研究发现受试者在某些特定的地点会产生相同的情绪,并确定了这些产生显著影响的地点.然而,此类研究尚有许多问题并未得到充分解决,例如:究竟是哪些空间因素对人的情绪产生影响;这些影响因素的综合作用机制如何测定;能否建立基于这些空间因素的情绪预测模型等.
针对以上问题,本文简要回顾了情绪数据的获取方法以及如何确定具有显著空间特征的地点.在此基础上,进一步提出运用视域分析技术对可能影响人们情绪的建筑形态因素进行提取,利用逻辑回归建立了基于视域参数的预测模型,阐明了多因素的综合作用机制,并基于视觉熵和视觉维数对这些地点的实景照片进行了图像分析.进一步解析城市空间属性与受试者体验的关联耦合作用,以便实现对城市空间环境的有效评估,并对潜在影响进行预测,从而提高城市空间设计的合理性和有效性,使得城市规划与设计活动更好地服务于城市生活.
1 情绪数据采集
1.1 理论依据
根据发展心理学的研究成果,正常的婴儿在2.5个月便逐渐开始表现出一些共同的情绪特征,例兴趣、惊讶、喜悦、生气和害怕等,被称为 基本情绪(primary emotions)[9].当婴儿成长到 2 岁左右时,逐渐发展形成各种较为复杂的衍生情绪(secondary emotions),反映了人们的主要心理倾向[10].
采集情绪数据的智能手环(smart band)由苏黎世联邦理工学院信息建筑小组提供,该设备可以通过内置的金属电极对受试者的皮肤电阻和温度进行实时记录,通过数据分析从而对情绪极性和强度进行分析判断.利用便携式GPS定位装置与智能手环进行同步记录,以5 s作为基本单位对智能手环的数据进行累加,实现与GPS的数据匹配.
实验地点选择瑞士苏黎世北部约6 km的奥林冈(Oerlikon)新区,实验路线全长大约2.2 km.实验选择在2013年10月14—22日天气晴好的条件下进行,受试者的人数为13人,包括8名男性和5名女性.实验途经的路线和地图均事先发放给受试者,规定必须以步行的方式完成整条路线,并对路线中重要节点的空间环境进行拍照记录.智能手环和GPS定位仪在实验中将自动记录测试人员的情绪数据和地理坐标,转换为代表空间位置的点要素,并建立数据库.通过参考情绪坐标图将点要素集合划分为2组,分别代表正面情绪(P集合)和负面情绪(N集合).
1.2 确定有效采样点
影响受试者情绪的因素大致可以分为2类:①与特定地点的空间属性有关,其受到时间和随机因素的影响相对较小;② 由时间和其他外部偶然因素等引起的变化.由于受试者的测试时间不同,彼此间不存在直接的相互影响,其情绪数据测量具有相对的独立性.因此,利用空间聚类分析(spatial cluster analysis)强化P集合和N集合中由于空间因素而引起的情绪特征,并减少随机因素的干扰.由于空间聚类分析受到分析范围的影响比较显著,需要利用增量空间自相关分析进行检验.通过设定多个阈值对模型的z得分进行观察,当z得分最高时,表示在该阈值下的空间聚类特征最为显著.分析结果显示P集合和N集合的阈值分别在23.5和11 m时呈现最为显著的聚类特征.在该阈值下利用Getis-Ord-General-G模型进行空间聚类分析,其计算式为[8]
式中,G为Getis-Ord-General-G模型的系数;wij为要素i与j之间的空间权重;n为要素数量;xi和xj分别表示要素值.
结果表明,P集合和N集合的z得分为2.87和1.96,表明2组点要素整体上呈现集聚模式,说明受试者的情绪在整体上具有较为显著的共同趋势.
为进一步明确情绪强度的分布模式,避免一些比较明显的高值点可能是受到偶然环境影响所引起的,不具备显著的统计学意义.因此,采用Getis-Ord-Gi*模型进行热点聚类分析,其计算式为[8]
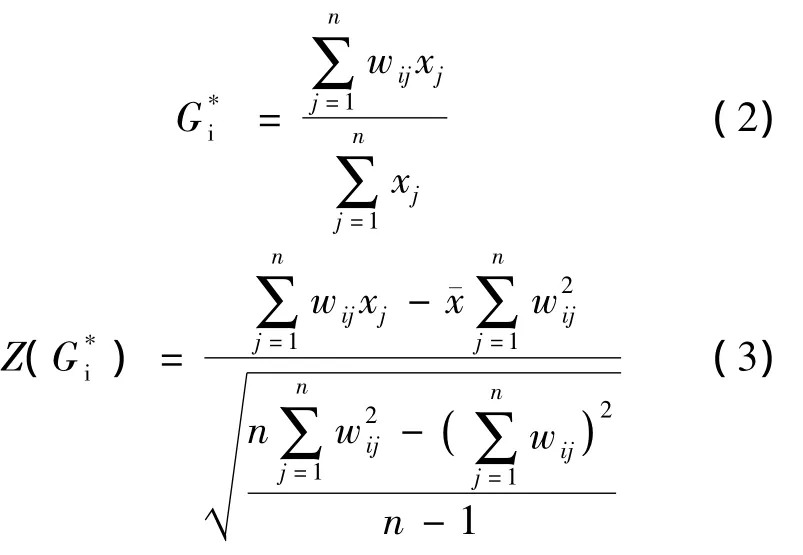
式中,G*i为Getis-Ord-Gi*热点聚类模型的系数;Z(G*i)为模型的显著性得分.
通过计算模型的显著性得分(见式(3))后,在统计学意义上判断高、低值的集聚区域和显著性水平,并利用颜色将高、低值聚类标识出作为下一步分析的有效采样点,其中红色区域代表高值聚类,蓝色区域代表低值聚类(见图2).通过受试者的ID号对聚类要素进行标识,结果显示这些数据分别属于多个不同的测试者,说明受试者在这些采样点反映出类似的情绪特征.利用热点聚类共提取有效采样点348个,其中具有正面情绪的样本254个,大致集中分布在11个地点;负面情绪的样本94个,大致集中分布在9个地点(见图1).
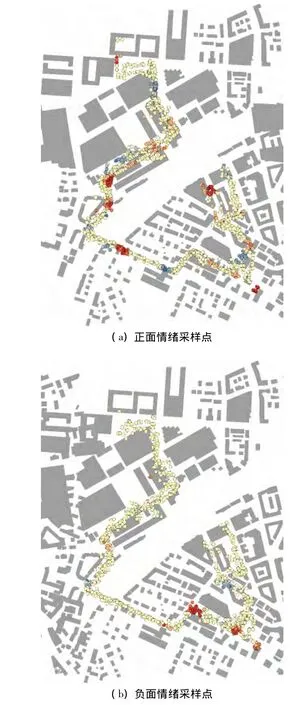
图1 热点聚类分析
2 空间形态分析
基于以上计算获得的有效采样点,可进一步深入分析城市空间属性的潜在影响,大致分为3个步骤:①提取受试者视域范围内的建筑肌理,对其形态指标进行分析,获得外部空间环境的基本数据;②计算有效采样点的视域参数,利用二元逻辑回归模型计算其对受试者情绪极性的影响概率,尝试建立视域参数对于情绪极性的预测模型;③ 对有效采样点的实景照片进行分析,综合运用视觉熵和视觉分形维数分析受试者的情绪如何受到空间环境影响.
2.1 建筑形态比较
视域(isovist)的概念最早由 Tandy[11]提出,随后Benedikt[12]对其进行了发展,其原理是将空间抽象为无数点集,视域可简化为其与视点直接互视的子集.在此基础上,通过一系列几何参数对视域的空间属性进行描述,并进行空间映射,从而形成覆盖整个研究区域的视域场(isovist field).
以P集合(11组)和N集合(9组)作为有效采样点,将视域半径阈值设置为200 m,在ArcGIS平台中可生成视域边界,提取与该边界邻接的建筑平面轮廓,计算平均建筑面积、面积离散度、破碎度、建筑平均间距等形态指标,利用均值法对这些指标进行无量纲化.其中面积离散度和破碎度的计算式分别为
式中,VA为面积离散度;F为破碎度;Ai为建筑单元i的面积;Am和CA分别为与视域边界临界的建筑单元面积均值和总周长.
研究区域被铁路分为东西2块场地(S1和S2),图2显示了不同情绪极性的有效采样点所对应的4组建筑形态指标.S1场地内主要为高档办公、大型商场以及集合住宅,有较多的开放空间,机动车较少,步行环境良好.在该区域内2种不同情绪下的建筑形态指标均呈现出一定的差异,例当受试者为正面情绪时,该采样点所提取的建筑轮廓普遍较大,并均沿着实验行进路线呈骤降趋势(见图2(a)),面积离散度呈现相对较低水平(见图2(d)),破碎度总体趋于稳定(见图2(b)).当受试者为负面情绪时,该采样点所提取的建筑轮廓则相对较小,面积离散度变大,破碎度呈现轻微的先降后升趋势.S2场地的城市肌理非常细碎,分布有大量私人住宅,其东侧临近奥林冈火车站和商业副中心,城市道路较为密集,车流量大,然而在该区域内2种不同情绪下的建筑形态指标呈现出比较一致的共线性特征,仅在破碎度这一指标上存在一定的差异(见图2(a)).在统计软件SPSS17.0中通过独立样本T检验对P集合和N集合中的建筑形态指标进行统计分析,结果显示建筑形态指标均未出现显著性差异(p>0.05)(见表1).因此推测在S2场地中建筑形态对于情绪的影响处于相对次要的地位,建筑形态指标的差异性虽然可以在部分有效采样点之间进行对比,但难以对其他地点进行预测,可能存在其他更为显著的空间因素,需要进一步对其他空间形态属性进行深入分析,进一步查明原因.
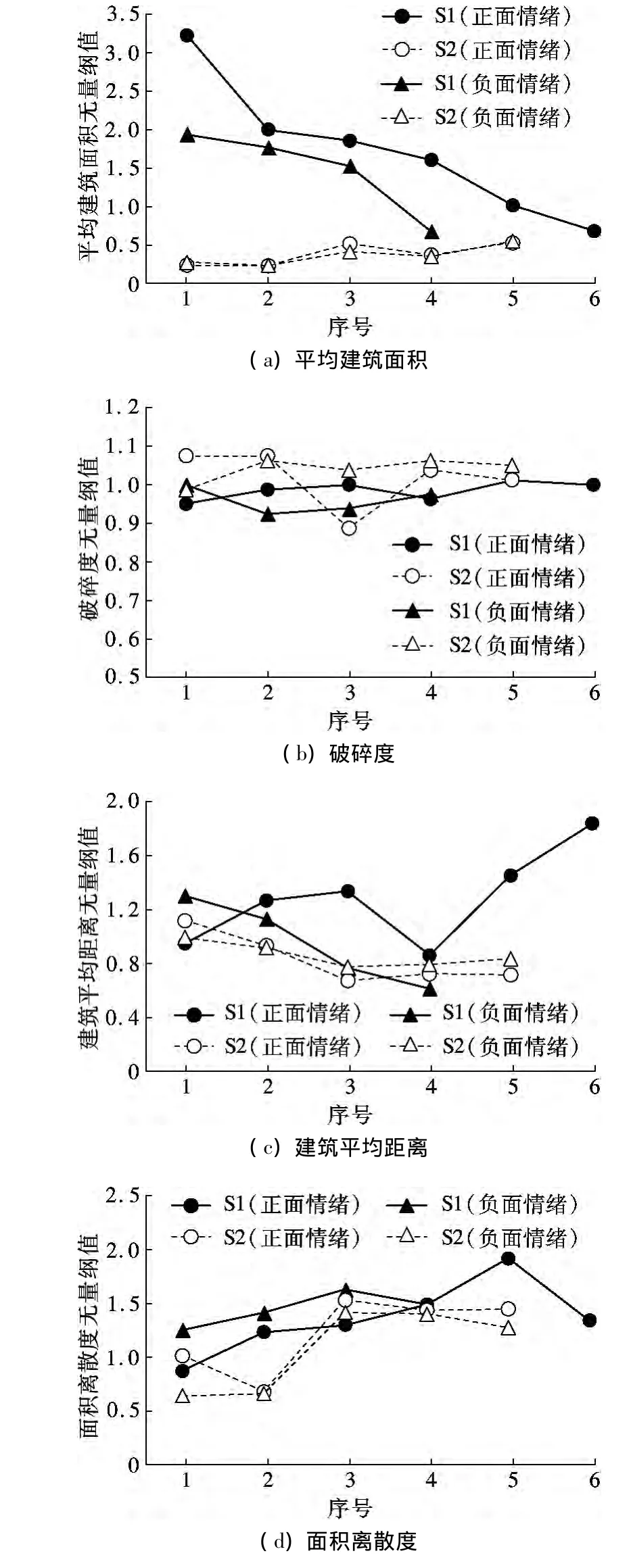
图2 建筑形态指标分析
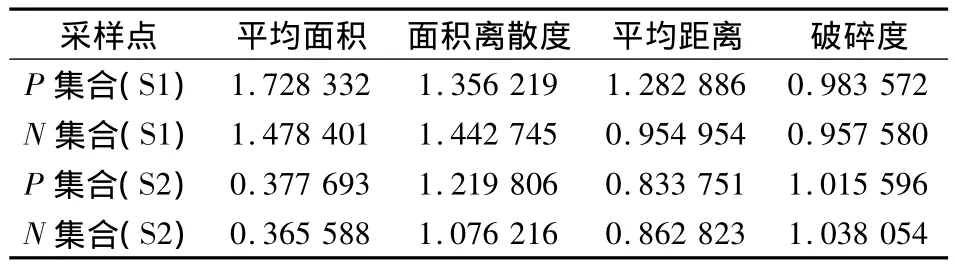
表1 各建筑形态指标无量纲统计值
2.2 视域参数与情绪模型
为研究视域参数对人们情绪影响的综合作用机制,在Depthmap平台中建立视域分析模型,将分析栅格的精度设置为10 m,选取了6个主要的视域参数(视域面积、视域周长、视域紧凑度、视域虚边界、最大视距、最小视距),这些视域参数可以较全面地描述受试人群在空间体验时的视线特征.其中视域紧凑度和视域虚边界的计算式分别为
式中,Gr为视域紧凑度;Cv为视域虚边界;As为视域面积;Cs为视域周长;Cp为视域中实体边界的总长.
将计算所得的各视域参数值按情绪极性分为2组,在SPSS中对视域参数进行独立样本T检验.结果显示,在置信水平为95%时,不同情绪极性条件下的所有视域参数均存在显著差异(p<0.05);当置信水平为99%时,除最短视距外,其余视域参数均存在显著差异(p<0.01).因此,可以利用二元逻辑回归法(binary logistic regression)计算视域参数引发正、负情绪的概率.在本案例中,逻辑回归函数的响应变量为正、负2种情绪极性.设响应变量为阳性时的概率为Pp,其计算式为

式中,Pp为概率值,取值区间为[0,1];Xi为本文所选的视域参数;Bi为变量的估计系数.
通过ROC曲线对逻辑回归模型的预测效能进行检验,将预测概率划分为若干临界点,得到每个临界点对应的灵敏度(sensitivity)和特异性(specificity),连接各点绘制曲线,曲线下面积(AUC)可以从整体上反映该模型的预测准确性.AUC越大,则准确性越高;约登指数(Youden)最大时可以确定最佳临界点,其计算式为

式中,Yd为约登指数;Se为灵敏度;Sp为特异性.
结果显示,当仅使用单一的视域参数进行逻辑回归时,反映模型整体拟合优度的Hosmer-Lemeshow系数均小于设定显著性水平(p<0.05),说明回归模型对于数据的提取并不充分,模型的预测值与观测值存在显著差异性.单一视域参数的ROC曲线均位于坐标轴的对角线附近(见图3(a)~(e)),AUC值普遍较低,表明单一视域参数的回归效果均不理想,因此可以判断受试者的情绪难以通过单一的视域参数进行有效预测.随后,将6组视域参数代入回归模型,根据显著性标准剔除相关性较差的视域参数,最终选择视域紧凑度(X1)、视域虚边界(X2)、最大视距(X3)作为协变量,纳入回归模型计算.通过选取效能最优的回归方法进行迭代计算,结果显示其 Hosmer-Lemeshow系数为0.128,大于设定的显著性水平(p>0.05),且反映模型拟合程度的Cox和SnellR2系数大于0.3,因此可以判断包含X1,X2,X3的综合参数模型从总体上具有统计学意义,模型的预测值与实际观测值的吻合度为83.9%,说明模型具有较好的预测效能.
综合参数模型显示,最大视距和视域紧凑度对受试人群的情绪具有显著的正相关影响,而视域虚边界虽然对情绪具有正相关影响,但影响程度相对较轻(见表2),这说明人们更倾向于形态较为规则紧凑的围合空间,并且在某些方向具备较好的远眺视野.以广场为例,在设计中应确保建筑的边界与广场形状的协调一致性,过于凹凸不平的建筑边界或突兀的建筑轮廓容易遮挡人们的视线,妨碍视域轮廓与广场形状在人们头脑中形成完形格式塔(gestalt)[13-14],从而降低正面情绪的发生概率,甚至引发负面情绪.视域虚边界意味着建筑之间存在间隙,当视域接近或恰好为凸多边形时,建筑物间隙的存在可能会对人们的情绪产生正面影响,而当视域变为凹多边形甚至是星形放射状时,过多的广场开口则不利于形成规则而紧凑的视域,从而引发人们的不安定感.实际情况下,这3个视域参数都可能作为矛盾伴生条件而相互影响,即其中一个参数的增加可能同时伴随着其他参数的降低,因此必须根据实际情况进行综合判断.
通过ROC曲线对综合参数模型进行检验(见图3(f)),其 AUC 值为 0.849(p<0.05),说明基于该模型具有较好的预测效果(根据经验,如果0.7<AUC<0.9,可定性为中等准确的预测范围).利用约登指数计算得到综合参数模型的最佳概率分割点位于0.51附近,与模型默认值(0.5)非常接近,因此接受模型分割点对预测结果的判断.
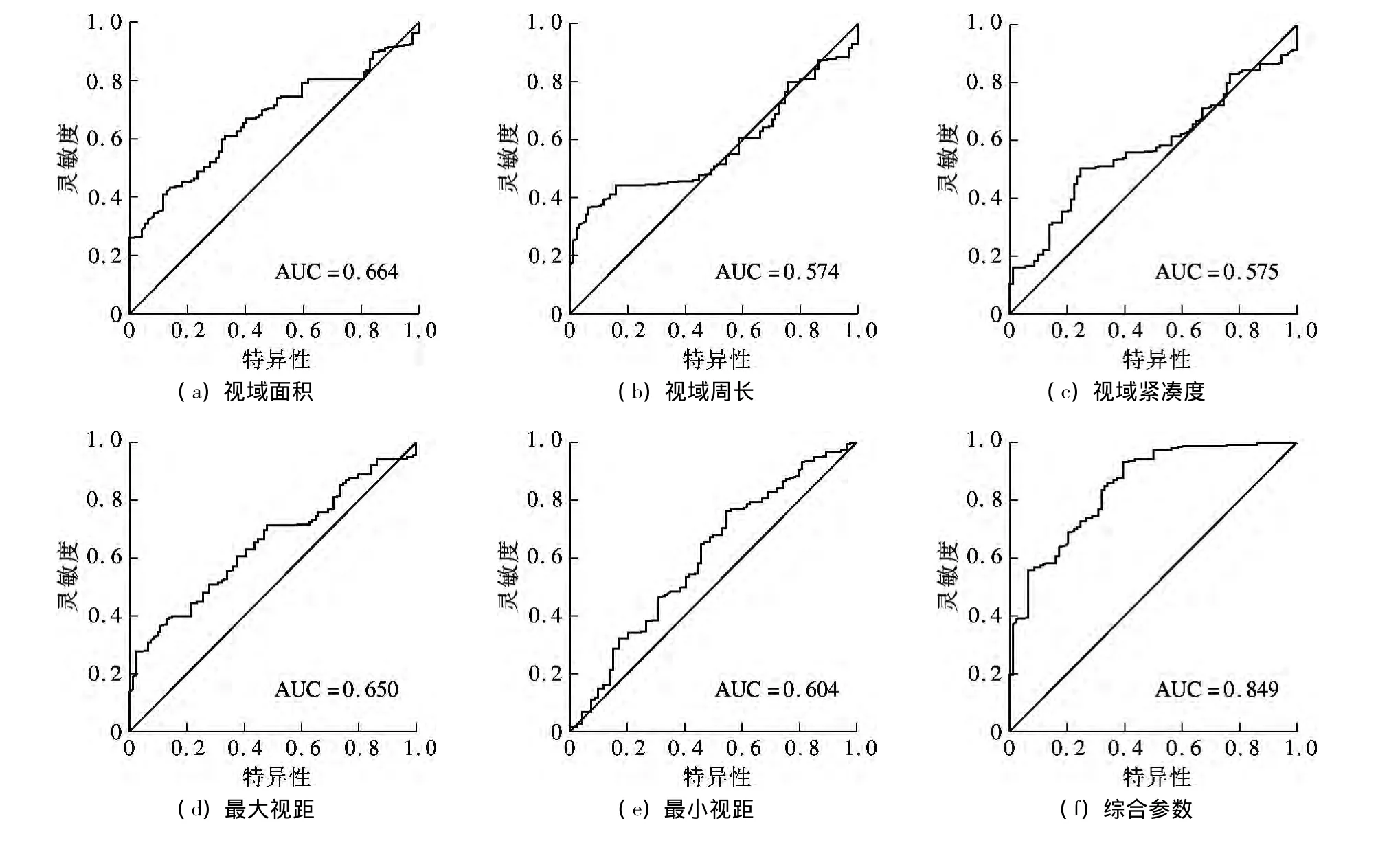
图3 ROC曲线分析
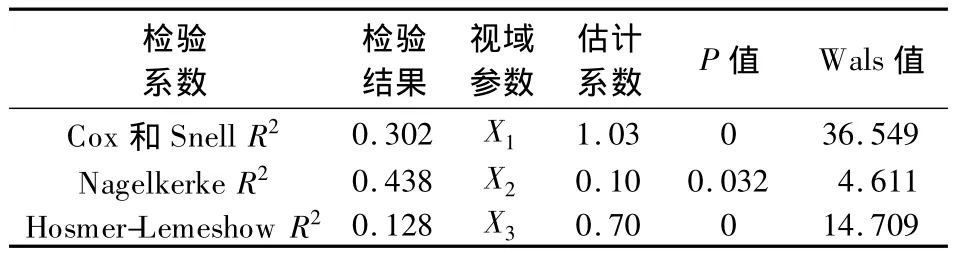
表2 综合参数逻辑回归模型结果
2.3 视觉熵与分形维数
人类视觉系统在感知图像时,其注意力的分布是不均匀的,这种不确定性可以通过视觉熵(visual entropy)对视觉信息进行度量[15].视觉熵是反映主体通过视觉感知信息含量的量化描述,即城市实体环境所呈现的视觉复杂性和丰富程度.因此本文对有效采样点的空间环境进行了实景拍照,对图像进行视觉熵的估算,该方法被广泛用于各种心理学实验中,具有较高的可信度[16-17].本文通过将照片处理为0~255的离散灰度图,将各灰度单元看作由图像信号源发出的不同信号,通过像素点的灰度分布对其总体的视觉熵进行计算,计算式为

式中,Ev为图像的视觉熵;Pi为像素灰度的概率.为消除图像的噪音干扰,设定阈值为3%,小于该阈值的信号将被屏蔽(no data),只计算图像中像素大于该阈值的区域.为简化计算,本文将图像灰度划分为25个等级,由于绿色波段的亮度信息较为充分,具有较好的图像反差[18],因此对该波段的灰度图进行分析.
此外,Mandelbrot等[19]认为自然界具有不规则和自相似的分形(fractal)特点,因此,城市空间环境的复杂性还可以通过视觉分形维数(visual fractal)进行测度,以便对无序和破碎的形态进行描述.运用计盒维数法(boxing-counting method)对实景照片进行分析,其具体步骤为:①在Photoshop中将图像尺寸调整为1 450×950像素,对所有照片的边界进行强化处理并转换为灰度图;②以灰度值128为分割点进一步转换为仅包含黑白两色的二元图像(binary graph),将二维网格覆盖于图像上,当网格的边长为d时,覆盖图形白色部分的有效网格数量为n(d).根据分形原理,n(d)为d的幂指数函数,计算式为

式中,D为分形维数.为便于观察和计算,将式(8)进行对数转换,并将函数绘制在双对数坐标图中,

2.4 视觉数据解析
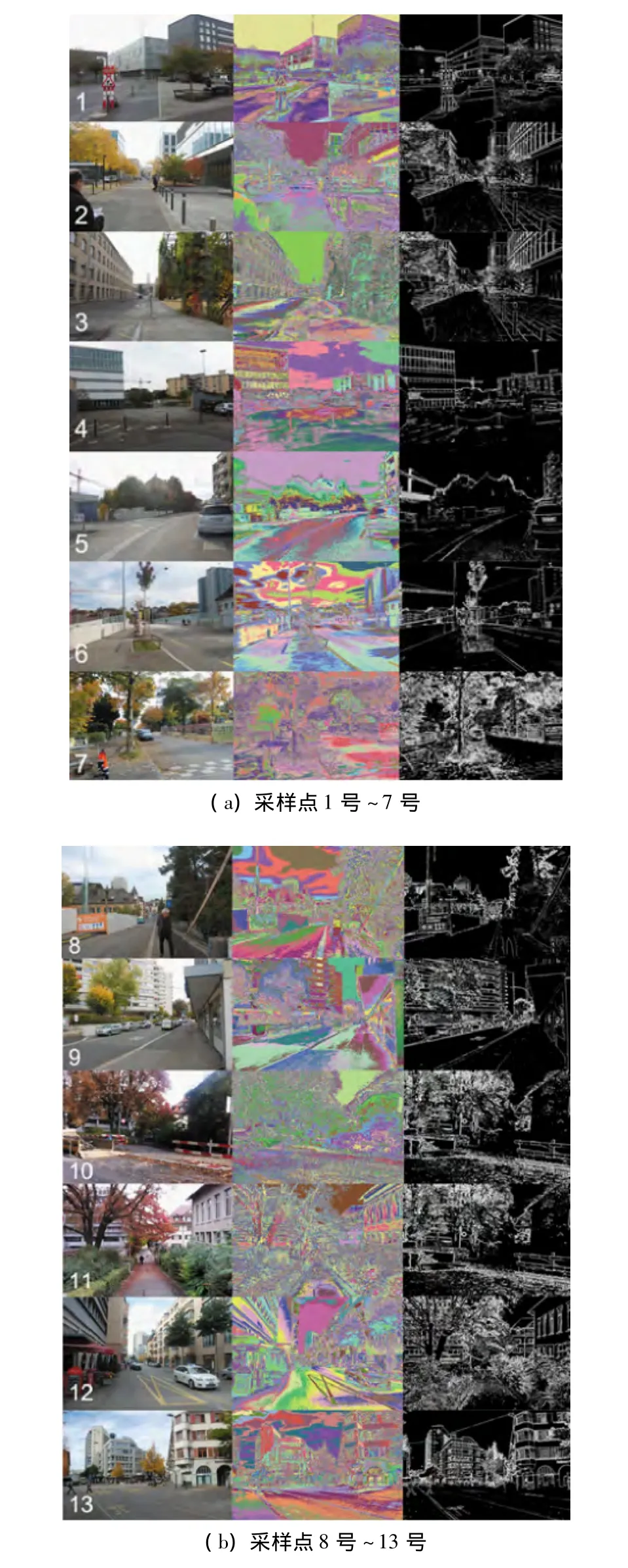
图4 实景照片及图像分析过程
沿实验路线依次选择了13组有效采样点进行视觉熵和分形维数的计算.通过观察图4可见,在具有正面情绪的地点基本呈现出较强的秩序感,建其斜率D即为该图像的分形维数,即筑的排布较为规整,建筑的围合空间具有明确的界定(1,2号地点),视域范围的形态比较完整紧凑,具有丰富的植物景观和较好的绿化层次(7,11号地点).受试者反映在这样的空间中易于获得安全感,而根据马斯洛的需求理论,这是形成愉悦感的重要前提;而负面情绪的地点则呈现出相对较弱的空间秩序,如方向性不强、空间破碎(如4,13号地点),8,10号地点虽然整体景观较好,但受到路障和部分杂物的干扰,空间的连续性受到破坏,这也可能是受试者产生负面情绪的原因之一;此外,正面情绪和负面情绪在某些地点出现一定的重叠,如3号地点的照片显示出强烈的景观反差,丰富的景观植被与刻板的厂房建筑并置于照片的左右两侧,因此推测受试者在该地点的情绪可能会因为关注对象的不同而发生改变,使得在这一地点采样的情绪极性出现差别.
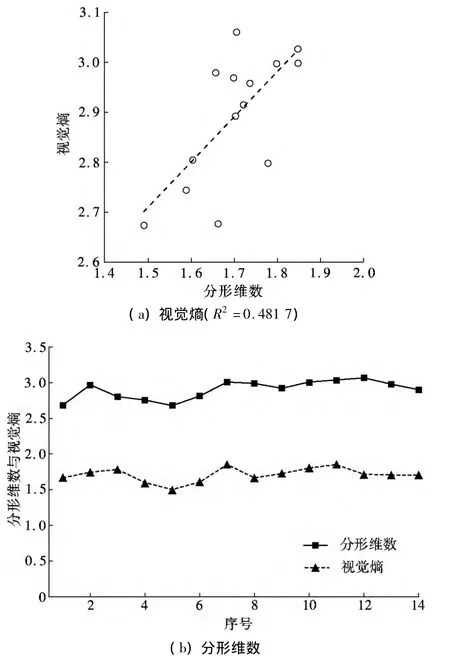
图5 视觉熵与分形维数的相关性
分析结果显示,视觉熵和分形维数整体上呈现较明显的共振波动(见图5),两者的Pearson相关系数为0.694(p<0.01),呈较强的线性相关.说明随着空间细节、层次、色彩等方面的变化,反映在图片中信息量的增减也会使得空间的复杂程度发生相应的变化,这两方面将共同对人们的视觉产生影响,从而引起人们情绪的变化.图6(a)、(b)显示的是视觉熵和分形维数在不同情绪时随采样点的变化情况,两者的波峰和波谷均发生在具有正面情绪的地点,且呈现更为强烈的波动,而负面情绪下两者的波动则相对平缓,主要反映在分形维数上(见图6(b)).因此,视觉熵和分形维数的数值高低并不直接决定人们的情绪极性,当视觉熵和分形维数具有显著特征时(如峰值),空间的信息量和复杂程度与其他空间发生强烈的反差,容易引起人们的注意,从而产生诸如好奇、喜悦、兴奋等较为正面的情绪.例如,2组视觉参数在7号、11号地点均处于较高的峰值水平,视野中建筑物处于非常次要的位置,层数较低,且被大量绿化遮挡,画面以树木和景观构成视觉中心,天空所占比例较少,画面的整体景观条件十分优越,因此引发正面情绪的概率较高;而5号地点的视觉熵和分形维数位于波谷水平,整体画面简洁明快,视觉干扰几乎降到最低,该地点具有开敞的空间和明确的道路,其空间的独特性得到受试者普遍反馈认同;6号地点虽然同样具有很低的视觉熵和分形维度,其视线开阔,景观元素相对扁平,桥面和天空占据了视野的绝大部分,树木较少,建筑的围合感弱,但其恰好位于跨越2块场地的铁路上方,受到火车通行的影响较为明显,因此容易引发人们的不安情绪.当视觉熵和分形维数处于中间值时,出现正、负情绪的概率则比较接近,不易直接判断.
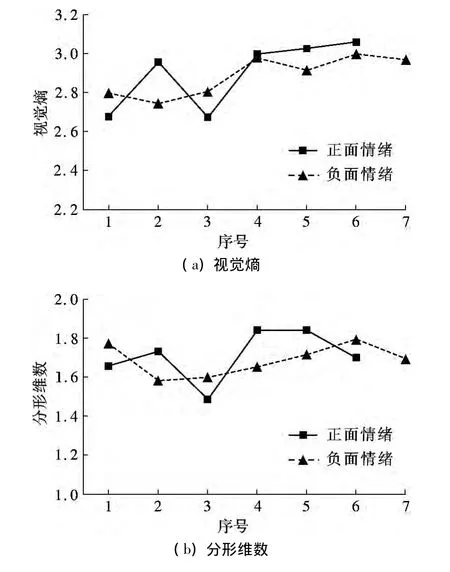
图6 视觉熵和分形维数随采样点的变化
分别比较视觉熵和分形维数在不同情绪时的均值,虽然结果显示正面情绪下视觉熵(2.899)和分形维数(1.714)略高于负面情绪的视觉熵(2.887)和分形维数(1.691),但对正、负情绪下的2组参数进行独立样本T检验时未出现显著差异(p>0.05).因此,通过将视觉熵和视觉分形维数进行相加,得到两者的综合视觉指数,将当前综合指数与前一个采样点的综合指数进行比较,观察数据的变化趋势,即
式中,E为综合视觉指数;Ei为采样点i的视觉指数;E*i为视觉变化指数.将各采样点的变化指数与情绪极性进行匹配,结果显示情绪极性与变化指数在13个样本中的吻合度达到70%(见表3),在一定程度上印证了之前的分析,即受试者在行进过程中的情绪变化除了直接受当前视觉因素的影响外,还可能与体验过程的时序组织有关,人们会将各个不同的空间节点联系成一副连续的整体图景,交叉路口、道路转角、广场、标志性建筑等均可能产生空间转换的效果,这种影响具有一定的时间延续性.当人们进行空间体验时,会自觉地与前一个或下一个空间的视觉属性进行比较,对前后图景差异的回顾或预期可能是引起情绪变化的重要原因之一.
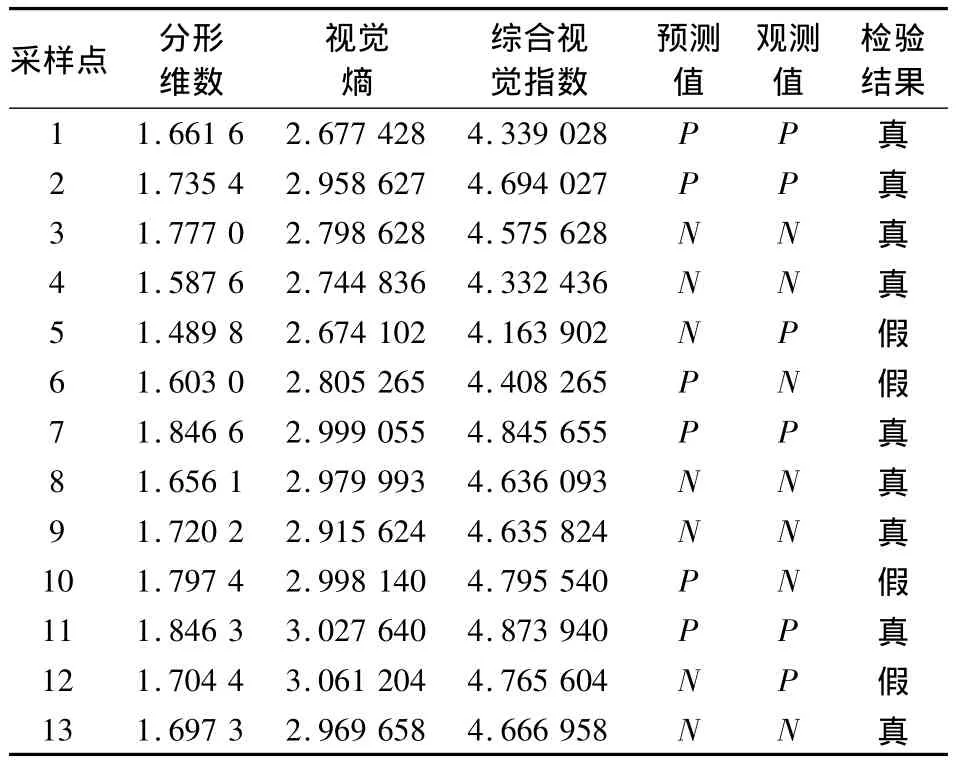
表3 视觉熵及分形维数检验结果
3 结论
1)利用平均建筑面积、面积离散度、破碎度、建筑平均间距等建筑形态指标对采样点的城市空间进行了对比.研究发现,受试人群对城市空间的感受源于建筑群体的组合关系,尺度和形态差异的适度性有益于建筑群组形成均衡有序的城市空间,当较大尺度的建筑与友好连续的步行空间相互配合时,可以让步行者形成便捷通畅的空间印象,进而激发愉悦的城市空间体验.建筑是城市空间的重要组成部分,保持建筑在形态、尺度、体量上的协调统一对于步行环境的改善具有重要的作用,可通过制定城市设计导则进行有效控制.
2)步行者的城市空间体验还受到多种视域参数的综合影响,其中视域紧凑度、视域虚边界、最大视距的作用相对显著,这3个视域参数互为伴生条件.本文利用逻辑回归模型初步建立了视域参数与受试者情绪的预测模型,其预测值与实际观测值的吻合度为 83.9%,ROC曲线分析的 AUC值为0.849,说明模型具有良好的预测效能.研究还表明,形态紧凑、轮廓规则、视野良好、并具有适度围合感的城市空间容易激发步行者的正面情绪.因此,在城市设计中除了注重建筑物形成连续一致的边界外,还应尽量保证建筑边界与其他外部空间的协调一致,如适当提高街道的界面密度和建筑贴线率[20],并减少过于凹凸不平的建筑边界或突兀的建筑轮廓,避免遮挡行人的视线.
3)本文还尝试利用图像分析辅助设计师了解行人从实际景象中所获取的视觉信息.研究表明,丰富的视觉信息、良好的绿化景观、安全的步行环境都有利于营造宜人的城市空间.如果城市景观具有显著简洁明快的空间可识别性,亦可能引起人们的正面情绪.此外,人们对城市空间的认知依赖于一些重要的空间节点,以及由此所构成的整体图景.因此,一方面可以通过点、线、网相结合的步行系统加强城市空间连续性;另一方面应当注重保护具有特殊历史内涵的空间或场所,并在此基础上塑造一些具有可识别性的公共广场、街头绿地、道路转角等空间节点来强化人们的场所印象,从而形成城市整体空间图景.
致谢 瑞士苏黎世联邦理工学院信息建筑小组Reinhard Konig博士为情绪数据采集提供了设备和技术指导,巴勒斯坦纳贾赫国立大学城市规划工程系Ihab Hijazi博士为聚类分析的改进提出了宝贵意见.
[1]Hillier B.The city as a socio-technical system:a spatial reformulation in the light of the levels problem and the parallel problem[M]//Digital Urban Modeling andSimulation.Berlin,Germany:Springer Berlin Heidelberg,2012:24-48.
[2]Stamps A E.On shape and spaciousness[J].Environment and Behavior,2009,41(4):526-548.
[3]Dalton R,Holscher C,Peck T,et al.Judgments of building complexity&navigability in virtual reality[C]//Spatial Cognition.Portland,USA,2010:49-64.
[4]Wiener J M,Hölscher C,Büchner S,et al.Gaze behaviour during space perception and spatial decision making[J].Psychological Research,2012,76(6):713-729.
[5]Franz G,Wiener J M.From space syntax to space semantics:a behaviorally and perceptually oriented methodology for the efficient description of the geometry and topology of environments[J].Environment and Planning B Planning to Design,2008,35(4):574-592.
[6]Handy S L,Boarnet M G,Ewing R,et al.How the built environment affects physical activity[J].Views from Urban Planning Am J Prev Med,2002,23(2S):64-73.
[7]Ewing R,Handy S.Measuring the unmeasurable:urban design qualities related to walkability[J].Journal of Urban Design,2009,14(1):65-84.
[8]Koenig R,Schneider S,Hamzi I,et al.Using geo statistical analysis to detect similarities in emotional responses of urban walkers to urban space[C]//Sixth Internationa Conference on Design Computing and Cognition.London,UK,2014,41.
[9]姚凯南.婴儿的情绪发展及情绪障碍[J].中国儿童保健杂志,2003,11(6):389-391,393.
Yao Kainan.Emotional development and obstacles of infants[J].Chinese Journal of Child Health Care,2003,11(6):389-391,393.(in Chinese)
[10]Russell J A.A circumplex model of affect[J].Jour-nal of Personality and Social Psychology,1980,39(6):1161-1178.
[11]Tandy C R V.The isovist method of landscape survey[J].Methods of Landscape Analysis,1967,10:9-10.
[12]Benedikt M L.To take hold of space:isovists and isovist fields[J].Environment and Planning B,1979,6(1):47-65.
[13]Rock I,Palmer S.The legacy of gestalt psychology[J].Scientific American,1990,263(6):84-90.
[14]高晓昧.基于视知觉组织原则的城市设计中群组建筑实体构成的研究[D].杭州:浙江大学建筑工程学院,2010.
[15]Shannon C E.A mathematical theory of communication[J].Bell System Technical Journal,1948,27(3):379-423.
[16]汤晓敏.景观视觉环境评价的理论、方法与应用研究[D].上海:复旦大学环境科学与工程系,2007.
[17]汤晓敏,王祥荣.景观视觉环境评价:概念、起源与发展[J].上海交通大学学报:农业科学版,2007,25(3):173-179.
Tang Xiaomin,Wang Xiangrong.Landscape visual environment assessment(LVEA):concept,origin and development[J].Journal of Shanghai Jiaotong University:Agricultural Science,2007,25(3):173-179.(in Chinese)
[18]Sato T,Matsuoka M,Takayasu H.Fractal image analysis of natural scenes and medical images[J].Fractals,1996,4(4):463-468.
[19]Mandelbrot B B,Pfeifer P,Biham O,et al.Is nature fractal?[J].Science,1998,279(5352):783,785-786.
[20]周钰.街道界面形态的量化研究[D].天津:天津大学建筑学院,2012.
Coupling research on urban form and spatial experience
Li Xin
(School of Urban Design,Wuhan University,Wuhan 430072,China)
Abstract:According to data modeling and empirical study,information-aided analysis is involved to study the coupling relationship of urban form and spatial experience.Emotion data was collected using smart band and GPS(global positioning system)device for 13 subjects.Spatial cluster and hot-spot analysis are used to target the effective sampling locations.The shape indicators,isovist parameters,visual entropy,and visual fractal are analyzed from different perspectives within each defined isovist.The research results indicate that spatial experience is under comprehensive influence of multiple spatial factors above mentioned.The logistical regression model and receiver operating characteristic curve(ROC)are used for determining some key isovist parameters with relatively high prediction accuracy.Urban space nodes also exert a certain degree of influence on spatial experience through the arrangement of spatial sequence and scenario shifting.Finally,some improvement should be made for the optimization of living environment including enhancing the continuity and network of urban space.Attention should be paid both on design and management to create a pleasant urban space.
Key words:urban spatial form;spatial experience;isovists;logistic regression
中图分类号:TU984
A
1001-0505(2015)06-1209-09
doi:10.3969/j.issn.1001-0505.2015.06.033
收稿日期:2015-04-07.
李欣(1983—),男,博士,讲师,li-xin@whu.edu.cn.
基金项目:国家自然科学基金资助项目(51408442).
李欣.城市空间形态与空间体验的耦合性[J].东南大学学报:自然科学版,2015,45(6):1209-1217.[doi:10.3969/j.issn.1001-0505.2015.06.033]
猜你喜欢
社会科学战线(2022年8期)2022-10-25 03:16:02
冰雪运动(2020年1期)2020-08-24 08:10:58
武术研究(2020年2期)2020-04-21 10:32:56
时代人物(2019年27期)2019-10-23 06:12:00
中共南昌市委党校学报(2017年6期)2017-02-06 03:27:12
学习月刊(2016年4期)2016-07-11 02:54:18
冰雪运动(2016年4期)2016-04-16 05:55:06
中国井冈山干部学院学报(2015年5期)2015-02-27 16:02:40
中共宁波市委党校学报(2014年5期)2014-03-01 01:48:57
声屏世界(2014年8期)2014-02-28 15:18:11