基于ADAMS的某高机动雷达天线动力学分析
2015-09-11 13:38王德宇王进军
电子机械工程 2015年6期
周 波,王德宇,王进军
(武汉滨湖电子有限责任公司, 湖北 武汉 430205)
基于ADAMS的某高机动雷达天线动力学分析
周 波,王德宇,王进军
(武汉滨湖电子有限责任公司, 湖北 武汉 430205)
文中简要介绍了某高机动雷达天线单元及其举升机构,应用ADAMS软件对该雷达天线举升机构建立了虚拟样机模型,对天线在自动架设过程中的精确位置进行求解,并分别进行了不同工况的动力学仿真分析。最后得到驱动丝杠的轴向载荷及伺服电机的功率。天线的运动情况清晰直观,详细比较了不同工况下天线运动过程中的力学性能差异。仿真结果表明,虚拟样机技术为产品的系统动态性能分析提供了有效手段。该研究结果可为工程设计提供理论依据。
高机动雷达;ADAMS;天线;动力学
引 言
某雷达为车载三坐标相控阵雷达,其天线阵面口径大,由于与武器系统互联,雷达机动性要求高,而机动性在天线单元上最直接的体现就是天线在运输和工作两种状态间迅速转换[1]。为了满足雷达天线单元的公路、铁路、空中、海上运输和阵地间快速转移的特殊要求,该雷达天线采用了阵面分块折叠运输形式,同时考虑在车载条件下雷达能正常工作,天线需举升到一定高度,以克服车头等障碍物对天线的遮挡[2-3]。该雷达通过1套天线举升机构实现其要求,天线举升机构由3套伺服驱动装置及1套平行四边形连杆机构组成,驱动装置分别为天线折叠/展开驱动装置、天线举升驱动装置和天线俯仰驱动装置。举升机构工作原理是以伺服电机为动力,通过平行四边形连杆机构实现天线的举升,通过双丝杠实现天线折叠/展开、俯仰。
雷达天线举升机构是一种典型的变负载、多工况的机电一体化产品,其结构动态性能将直接影响整机的性能[4]。本文利用多体系统动力学分析仿真软件ADAMS,结合三维建模软件UG,建立雷达天线举升机构机械系统虚拟样机模型,对天线运动过程进行仿真和分析。
1 机械系统虚拟样机的建立
为节省建模时间,虚拟样机的三维模型应尽可能简单,只需保证各铰链点的位置关系准确。天线的折叠、举升、俯仰动作执行机构均为2套伺服电机同步驱动普通梯形丝杠,本文只考虑单套伺服电机作用。在UG中建立天线举升机构零部件,主要包括天线上块、天线下块、底座、举升主臂、举升辅臂、过渡支架、丝杠,并将各零部件通过装配约束组装成装配体。
通过ADAMS软件自带的CAD接口将装配体无缝导入到ADAMS中,自动生成各构件,同时可以修改关键构件的质量属性和质心坐标,各构件间还需要添加运动副来实现相对运动。根据雷达各组成部件的运动关系和装配关系,建立相应的marker点,在各marker点上对雷达各组成部件之间建立约束。在雷达天线举升机构虚拟样机中共建立12个构件、16个运动副和3个驱动副,其中底座与大地固连,天线运输状态下的虚拟样机模型如图1所示。
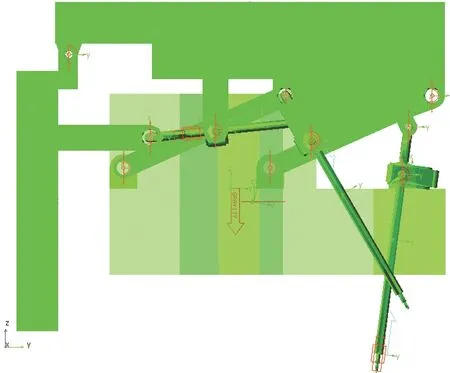
图1 天线举升机构虚拟样机模型
2 工况计算
计算时假定天线质量为4.5 t(其中上块1.8 t,下块2.7 t),底座质量为2.5 t。各驱动装置丝杠行程为折叠丝杠950 mm,举升丝杠780 mm,俯仰丝杠880 mm。各驱动电机输出到丝杠端的直线进给速度为10 mm/s,启动和制动时间各1 s。
天线运输和工作状态之间的转换可按分步运动和同步运动两种运动方式进行,以满足不同的功能需要。
工况1为分步运动,按折叠-举升-俯仰顺序,分3步完成。3个驱动副的函数分别为:
折叠丝杠:if(time-1:10*time,10,if(time-95:10,10,if(time-96:10*(96-time),0,0)))
举升丝杠:if(time-96:0,0,if(time-97:10*(time-96),10,if(time-174:10,10,if(time-175:10*(175-time),0,0))))
俯仰丝杠:if(time-175:0,0,if(time-176:10*(time-175),10,if(time-263:10,10,10*(264-time))))
工况2为同步运动,3个动作同时进行,1步完成。3个驱动副的函数分别为:
折叠丝杠:if(time-1:10*time,10,if(time-95:10,10,if(time-96:10*(96-time),0,0)))
举升丝杠:if(time-1:10*time,10,if(time-78:10,10,if(time-79:10*(79-time),0,0)))
俯仰丝杠:if(time-1:10*time,10,if(time-88:10,10,if(time-89:10*(89-time),0,0)))
以上两种工况均不考虑摩擦和装配间隙。
3 仿真结果分析
工况1天线由运输状态到工作状态共运行264 s,过程如图2所示。

图2 分步运动示意图
工况2天线由运输状态到工作状态共运行96 s,过程如图3所示。

图3 同步运动示意图
折叠/展开驱动装置、举升驱动装置、俯仰驱动装置在两种工况条件下丝杠推力随时间变化曲线分别如图4、图5、图6所示。

图4 折叠丝杠推力随时间变化
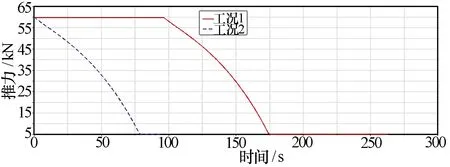
图5 举升丝杠推力随时间变化

图6 俯仰丝杠推力随时间变化
从图4~图6可以看出,折叠/展开阶段丝杠推力在初始状态为6 545 N,其后不断增大,到天线上块展开至水平位置时达到最大,工况1最大值为32 558 N,工况2最大值为23 476 N,这是由于此时工况2折叠丝杠推力到天线上块与下块铰链中心的力臂大于工况1。举升阶段丝杠推力在初始状态最大,为60 035 N,其后不断减小。俯仰阶段丝杠推力在初始状态为94 628 N,为工况2的最大值,其后不断减小,工况1则不断增大到最大值109 810 N,保持一段恒定后继而不断减小。总的来说,天线从运输状态到工作状态各阶段的丝杠推力近似呈线性变化,且天线位于工作状态时各丝杠的受力状况良好。
折叠/展开驱动装置、举升驱动装置、俯仰驱动装置在两种工况条件下有效功耗随时间变化曲线分别如图7、图8、图9所示。
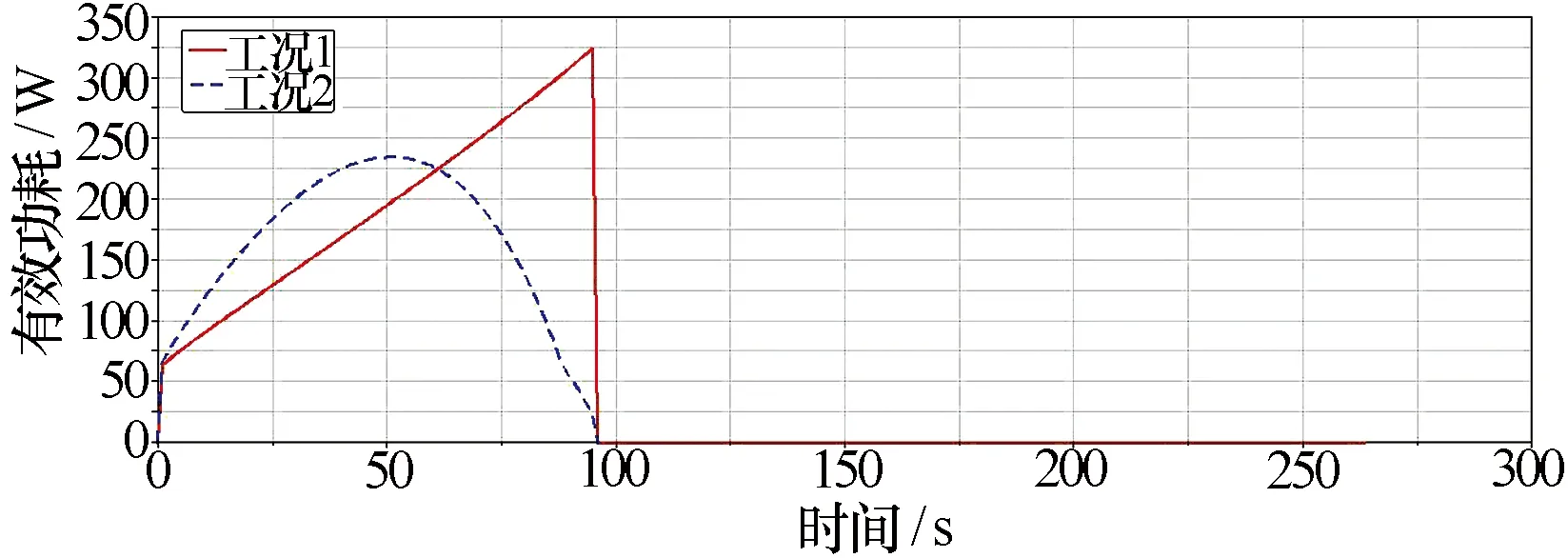
图7 折叠/展开驱动装置有效功耗随时间变化

图8 举升驱动装置有效功耗随时间变化

图9 俯仰驱动装置有效功耗随时间变化
从图7~图9可看出,两种工况下,折叠/展开驱动装置有效功耗最大值为323 W,举升驱动装置有效功耗最大值为595 W,俯仰驱动装置有效功耗最大值为1 090 W。各伺服电机的最大功率可由最大有效功耗除以传动效率估算出来,可为伺服电机选型工作提供参考。
同时还可以获取雷达天线举升机构各个铰接点处的速度、加速度和支点反力随时间的变化曲线。随后,利用上述动力学求解结果,在详细设计时对主要结构件开展有限元分析和结构优化工作。
4 结束语
应用ADAMS对雷达天线进行动力学仿真,可以直观得到各工况下天线的运动情况,并对运动过程中铰链的力学性能状况和驱动机构的驱动力及其有效功耗进行分析,这些结果对雷达总体布局设计和工程细节设计都非常关键。
工况1可作为雷达天线的中间状态使用,例如维修状态,工况2由于天线架设、撤收时间短以及力学性能较工况1好,可作为紧急状态和常规状态使用。同时,天线架设、撤收时间符合系统指标要求。目前,该雷达天线举升机构已成功用于某高机动雷达的大型平面阵列天线的折叠、举升、俯仰,通过长期使用证明系统性能良好、可靠性高。
[1] 钱海涛, 刘湛, 程林. 新型雷达天线俯仰举升机构设计[J]. 电子机械工程, 2012, 28(1): 29-32.
[2] 张增太, 房景仕. 某雷达天线举升翻转机构的设计[J]. 雷达科学与技术, 2009, 7(4): 312-315.
[3] 程辉明, 许统融. 地面高机动雷达集成化设计技术[J]. 电子机械工程, 2005, 21(3): 22-23.
[4] 黄海涛, 彭国朋. 基于虚拟样机技术的雷达天线车机-液耦合仿真及其优化分析[J]. 电子机械工程, 2009, 25(5): 56-58.
周 波(1987-),男,硕士,工程师,主要从事雷达结构设计和力学仿真相关工作。
王德宇(1978-),男,硕士,高级工程师,主要从事雷达结构总体设计工作。
王进军(1978-),男,硕士,高级工程师,主要从事雷达结构设计及伺服传动工作。
Dynamics Analysis of a Highly Mobile Radar Antenna Based on ADAMS
ZHOU Bo,WANG De-yu,WANG Jin-jun
(WuhanBinhuElectronicCo.,Ltd.,Wuhan430205,China)
This paper briefly introduces a highly mobile radar antenna and its lifting mechanism. The virtual prototype model of the radar antenna lifting mechanism is established by ADAMS software. Also the exact displacement of the antenna in the process of antenna auto set-up is solved and the dynamics simulation analyses of different working conditions are performed. Finally both the axial load of driving lead screws and the power of servo motors are obtained. The movement of the antenna is clear and intuitive. The differences between the mechanical properties of antenna movement under different conditions are compared in detail. Simulation results show that virtual prototyping technology is an effective method for analyzing system dynamic properties. This study result can provide a theoretical basis for engineering design.
highly mobile radar; ADAMS; antenna; dynamics
2015-10-11
TN957.8
A
1008-5300(2015)06-0058-03
猜你喜欢
中国特种设备安全(2022年4期)2022-07-08
微特电机(2020年11期)2020-12-30
装备制造技术(2020年4期)2020-12-25
房地产导刊(2020年6期)2020-07-25
制造技术与机床(2019年11期)2019-12-04
制造技术与机床(2019年1期)2019-01-14
电子制作(2018年17期)2018-09-28
通信电源技术(2018年3期)2018-06-26
制造技术与机床(2017年8期)2017-11-27
中国棉花(2017年10期)2017-11-04